英语原文共 11 页,剩余内容已隐藏,支付完成后下载完整资料
蒸煮自适应控制的家用电磁炉
IEEE学生会员 David Paesa,IEEE学生会员 Carlos Franco,IEEE学生会员 Sergio-Llorente,IEEE会员 GonzaloLoacute;pez-Nicolaacute;s, IEEE会员 CarlosSaguuml;eacute;s)
摘 要
本文有两个目的,首先我们的目的是研究检测器的电位在过程控制的应用。其次,我们的目标是克服国内炊具目前在温度控制性能的限制。为此我们提出了一种蒸煮自适应控制电磁炉。根据多模式的检测器,其各项数据可以实现实时更新。这种新的检测器器通过多模式切换的思想改变了复位检测器的框架。
这种多模式的检测器由一个复位检测器和多个固定识别模型组成。能够实现满足用户需求的控制方案。如快速升温,精确的温度控制,和快速的抗干扰能力都优于以前的结果。此外,所提出的控制方案降低了能源消耗,因此,它可以提高整个烹调过程的效率。还有,我们设计了一个基于强大定量反馈系统(QFT)的控制器。
最后,我们在真实的电磁炉开展了几个验证测试,通过与基于定量反馈理论的控制器对比,突出我们设计的有效性。
关键词: 自适应控制,家电,感应加热,检测器,温度控制
第1章:绪论
在家用电磁炉中,电路拓扑为感应线圈提供高频电流,产生交变磁场。如果这个磁场被施加到铁磁盘上,它会产生涡流和磁滞现象,从而使锅发热。近日,由于电磁炉特定的功能,例如升温快、节能、效率高等,其在国内已越来越受欢迎。因此,电磁炉的研究引起了理论学者和工程师们的重视。
在使用电磁灶的烹饪过程中提高效率和节能的方法主要是以更有效的方式给锅具提供最大功率,例如设计高效谐振电路拓扑,调制方式以及使用电感器。
然而,由于温度的高低不能直观反馈至用户,用户往往使用了比实际烹饪需要更多的功率。这种能源浪费大大降低了整个烹饪过程的效率。我们发现在整个烹饪过程中的效率的改善,可以通过蒸煮温度自适应控制来实现。此外,它有更多的优势。例如,通过正确的控制锅具的恩度使食物的烹调时间减少,同时还能避免温度太高造成烧坏食物,或温度过低,导致食物半生不熟。此外,它还可以用来进行更复杂的烹饪过程,如蒸煮。蒸煮的过程,食物需要在温度为88◦C至94 C◦的水里加热才能保持食物最完整的美味。然而,这样的烹饪过程是很难在传统的电磁炉,通过用户自己控制温度达到的。
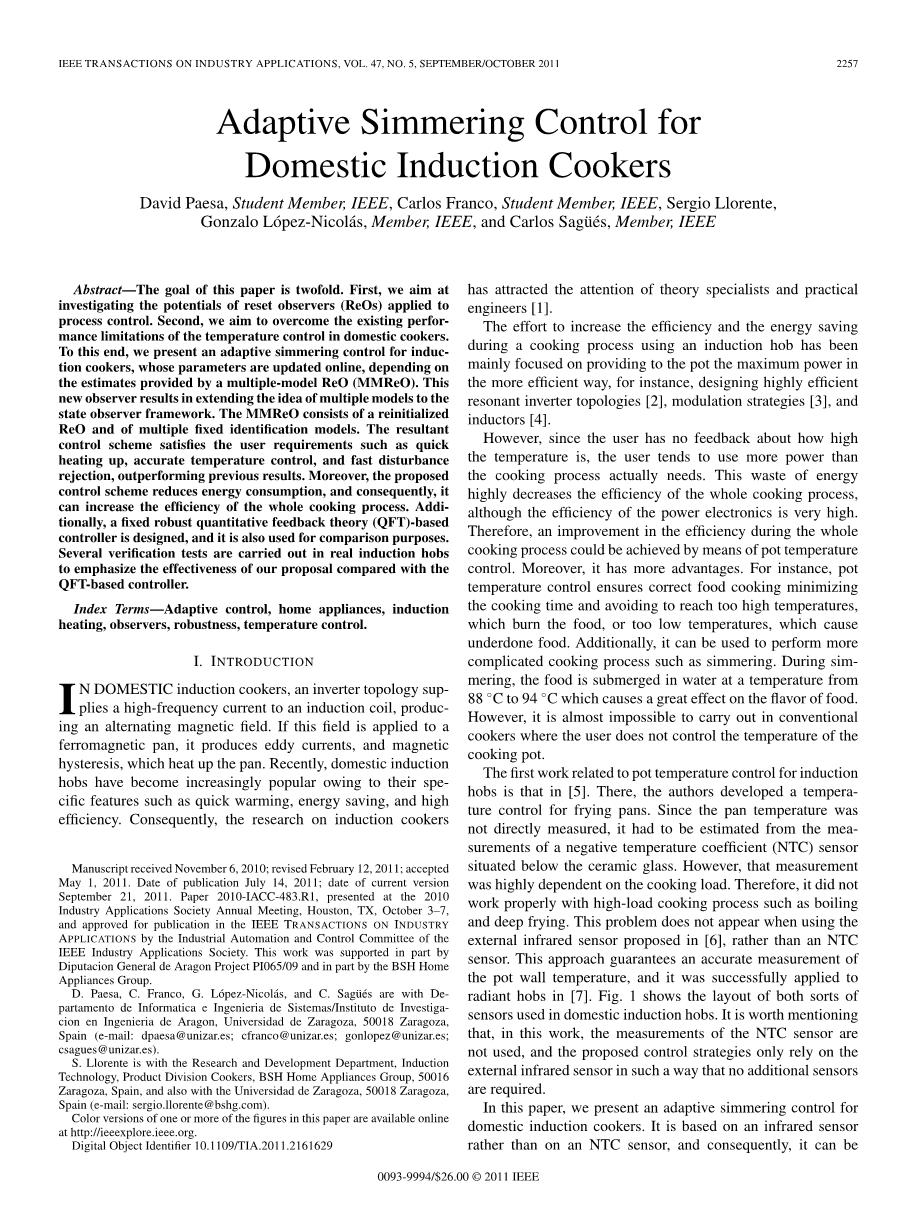
电磁炉温度控制有关的第一项工作是在[5]中介绍。在那里,作者开发了煎锅的温度控制。由于锅温度没有办法直接测量,因此必须从位于陶瓷玻璃下方的负温度系数(NTC)传感器的测量结果来估算。然而,该测量结果会因为烹饪的负荷情况的不同受影响。因此,在沸腾和油炸等高负荷烹饪过程中不能正常工作。当使用[6]中提出的外部红外传感器而不是NTC传感器时,就不会出现此问题。这种方法保证了锅壁温度的准确测量,并且成功应用于电磁炉中。图1显示了家用电磁炉中使用的两种传感器的布局。值得一提的是,在本次的设计,不使用NTC传感器的测量值,所提出的控制方案只依靠外部红外传感器,不需要额外的传感器。
图1.家用电磁炉的主要元件
1.锅 2.陶瓷玻璃3.感应线圈4.内部NTC传感器5.外置红外线传感器。
本文中,我们提出了一种家用电磁炉的蒸煮自适应控制。它基于红外传感器而不是NTC传感器,因此可以应用于高负荷的烹饪过程。与其他以前的工作不同。我们的方案利用了系统精确模型的优势[8]。与[7]相比,这项技术模型的贡献之一是我们的控制方案是基于系统的分析模型得出的,而不是录入提前进行的实验测试数据,因此控制温度调整的过程被高度简化。具体来说,我们提出一种自适应控制器,因为多模式复位检测器(MMReO)提供的数据,保证温度控制方案的各项参数能够实时更新,它包括一个复位检测器,是作者最近提出的一种新颖的检测器,以及拥有初始参数的多个固定识别模型。也正因此,本系统还有能力分析应用于过程控制的检测器潜力。此外,为了比较,我们设计了一种强大的定量反馈理论(QFT)为基础的控制器,它是广泛应用于工业应用的控制技术。为了突出我们的方案的表现,两个控制方案都已经在真正的电磁炉中实现,并且已经进行了几次验证测试。
本文的结构如下。第二节主要介绍了系统的状态空间模型。在第三节中,设计了基于自适应检测器的控制器。第四节概述了基于定量反馈理论的控制器的调谐过程。 实验结果显示在第五节中,以便测试两种控制方案的鲁棒性和性能。 最后,是第六节的结论的概述。
第2章:系统模型
可以使用状态空间模型来表示由感应线圈提供的功率与系统的温度之间的关系。 通常,线性时不变系统描述如下:
(1)
其中xisin;Rn是状态向量,uisin;RI是输入向量,yisin;Rm是系统输出向量,Ap,Bp和Cp是(ntimes;n),(ntimes;l)和(m times;n)矩阵的常数。
在本文中,我们使用[8]中提出的分析锅具模型。有关如何获取该模型的读者可以参考。 主要思路是通过使用代表我们系统中出现的不同热传递的电气等效模型,来获得以下状态空间模型。
(2)
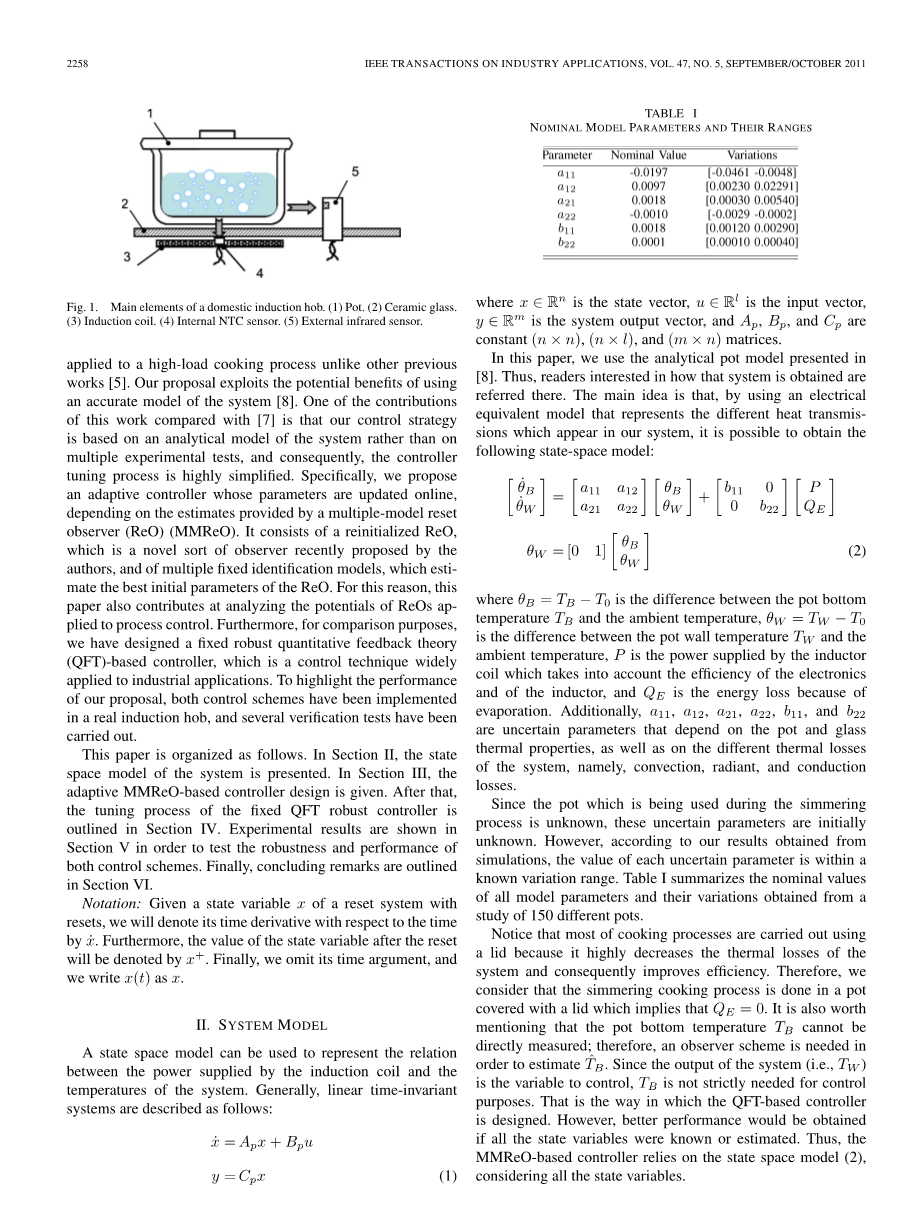
其中theta;B= TB-T0是锅底温度TB与环境温度之间的差值,theta;W= TW-T0是锅壁温度TW与环境温度之间的差值,P是由电感线圈提供的功率,该值考虑到电子器件和电感器的效率,QE是由于蒸发而导致的能量损失。 此外,a11,a12,a21,a22,b11和b22是取决于锅炉和玻璃热性质以及系统不同热损失(即对流,辐射和传导损耗)的不确定参数。
表1.标准模型参数及其范围
由于在蒸煮过程中使用的锅是未知的,这些不确定参数最初也是未知的。因此,根据我们模拟实验获得的结果,每个不确定参数的值在其实是能在已知范围内变化的。表I总结了所有模型参数的标准值及其在150个不同锅的测试中的变化。
需要注意的是,大多数蒸煮过程会使用锅盖,因为它会大大降低系统的热损失,从而提高效率。因此,我们认为蒸煮的过程是在盖上锅盖的锅中完成的,这意味着QE = 0。还值得一提的是,锅底温度TB不能直接测量; 因此,需要一个检测器来计算数据。由于系统的输出(即TW)是需要控制的变量,也正因此我们设计了基于QFT的控制器。因为基于状态空间模型的多模式复位检测器考虑了所有状态变量,所以如果所有状态变量都已知或能被计算,本系统就可以获得更好的性能。
第3章:基于多模式复位检测器的自适应控制方案
目前的控制技术如QFT或Hinfin;是被认为是有效的,目前的控制技术也基本能够满足控制要求,因为他们都考虑到了使用过程中最坏的情况(能够应对所有不确定性的系统)。但是,如果我们能够以某种方式减少烹饪过程的参数的不确定性,我们可以获得更好的表现。
自适应检测器可以在该系统中发挥关键作用,因为它们被广泛用于从可用信息(例如,系统输入和输出测量)来计算出系统的未知参数[9]。 因此,这种算法是一种有效的工具,足以应对可能出现在任何工业应用中的问题。 例如,它们可以用于处理由于最初参数不确定的建模系统,并且还可以处理其参数是时变的系统。 此外,它们不仅具有自适应控制的重要功能,而且具有故障检测等功能。
在不同种类的自适应检测器中,我们提出了一种基于系统的多模型的估算策略,以增加估算过程的鲁棒性。为了达到设计要求,我们首先引入了多模型的思想[11]。如果控制器的初始参数不足以达到设备参数,则自适应控制方案的初始检测时间将延长。而这种瞬态行为可以使用多模型[12],[13]进行改进。假设设备参数属于分布集S中,则该方法则使用具有不同参数的N个识别模型,但均匀分布在S中。还对每个模型的控制器进行了计算和调整。因此,提出的控制策略是确定了每个瞬间真实系统的最佳模型,并使用相应的控制器来控制设备。
基于[12],我们将多模型的概念扩展到状态检测器系统。 所得到的检测器方案称为多模式检测器。 以类似的方式,使用具有不同参数但均匀分布在S中的N个识别模型来估算实际系统的最佳模型。 在每个瞬间,最佳识别模型的参数被用作状态检测器的起始参数。 这个过程被称为状态检测器的重新初始化。 由于状态检测器的重新初始化参数更接近真实参数,所以估算过程的收敛时间减少。 之后,重新初始化的检测器的状态可以用于实际控制系统中。 此外,与最佳识别模型相对应的参数也可用于控制器中,从而提高系统的闭环效率。
图1 .多模式复位检测器
- 检测器方案
基于这种方法,我们在本文中提出一个自适应控制器,其参数在线更新,具体取决于多模式复位检测器提供的数据。 多模式复位检测器方案如图1所示。 它由重新初始化的检测器和多个固定识别模型组成。每个固定识别模型具有(2)中所示的结构,且具有根据表I定义的不同参数a11,a12,a21,a22,b11和b22,这实际上定义了我们的系统的分布集S。多模式复位检测方案的运行方式如下。
它根据系统y的输出(即,用红外传感器测量的温度)和系统u的输入(即,感应线圈提供的功率)来选择最能代表烹饪过程的模式。具体来说,该算法使用以下成本函数Ji找出最优模型iisin;[1,N]:
(3)
其中i = y - yi是被定义为系统y的输出与识别模型yi的输出之间的差。该算法还生成用于更新重新初始化检测器的参数的切换信号sigma;。 由于检测器参数更接近实际的系统参数,所以预期会降低检测器的瞬态特性,从而改善依赖于数据状态的控制性能。
如图2所示我们使用复位检测器,它的矩阵Ai和Bi根据所选择的最佳模型的矩阵重新初始化。 复位检测器的目的是计算在开始控制之后将被使用的系统状态变量(即,x = [theta;B,theta;W] T)。 ReO动力学描述在[14],[15]中
(4)
其中x是由检测器估算的数据,KI和KP分别表示检测器的积累值和比例增益,y = y-y是检测器的输出估计误差,Ai和Bi是先前以Aiasymp;Ap和Biasymp;Bp的方式识别出的最佳模型。另外,zeta;是计算的复位积分项。
(5)
其中Azeta;isin;R和Bzeta;isin;R是调整zeta;的瞬态响应的两个调谐标量,Ar是复位矩阵。
关于式(5),检测器可以看作是具有电流和复位状态的混合检测器,右侧的两个条件分别是电流和复位条件。 一方面,只要〜y·zeta;ge;0,检测器就会作为比例积分检测器。 另一方面,如果~y·zeta;le;0,则根据复位图Ar重置积分项。根据这个陈述,由于~y = Cp〜x,我们可以使用以下表示形式来定义两个集合:
(6)
其中M定义为
(7)
我们的实验结果突出显示了在估算方案中包含重新初始化的好处。由于复位检测器是非线性的,它可以满足纯线性检测器不能满足的要求。例如:复位元件可以降低估算过程的过冲和建立时间,而不牺牲上升时间。对于如何选择检测器的调谐参数感兴趣的读者参考[14]。
- 控制方案
当估算过程完成(当已经计算出x时),根据所识别的模型来更新自适应控制器的参数。这时选择自适应比例积分(PI)类控制器就非常简单的操作了[16]。 图3是自适应控制方案,它具有依赖于整数误差的值,其比例项直接影响系统状态而不是控制误差。相应的控制律由下式给出:
(8)
其中r是目标温度,xI是积分误差,Lii和LSi分别是控制器的积分增益和控制器的状态增益,它们是用极点放置法计算的。
图3.自适应控制方案
这里需要注意的是,由于我们已经设计了N = 60个固定识别模型,因此,为了简洁起见,我们不包括所涉及的参数的所有值(MMReO中的Ai和Bi和自适应控制方案中的LIi和LSi)。
- 稳定性分析
我们提出的基于多模型复位检测器的自适应控制器可以被认为是由有限数量的子系统和定义这些子系统之间切换的逻辑规则组成的动力系统。由于开关信号不存在限制,因此我们的设计的稳定性必须在随机环境下进行检查。
随机环境下交换系统的二次稳定性通常通过确保其所有子系统存在共同的二次Lyapunov函数(CQLF)来证明。二次稳定性意味着系统渐进稳定并且变得非常优秀,因为存在CQLF的条件可以表示为易于计算的线性矩阵不等式(LMI)。
由于基于多模型复位检测器的控制器的控制规律依赖于复位检测方案提供的估算数据,因此首先必须首先证明估算过程的渐近收敛(即估计误差〜x(t)→0为t→infin;)之后,闭环系统才能实现渐近稳定。
让我们开始分析多模型复位检测方案的系统动力相应误差。根据(4)和(5),可知它由N个不同的复位检测器组成,其中矩阵Ai和Bi根据最佳选择的模型而改变,并且其矩阵KP,KI,Azeta;,Bzeta;和Ar保持恒定,独立于所选择的模型。由于状态估计误差为〜x = x-x,并且通过定义增强状态估算误差eta;= [〜xTzeta;T] T,i = 1,...中的每一个的估算过程的误差动力为:
(11)
然后,以下规定为所有i = 1hellip;N之间的CQLF的存在提供了足够的条件,以保证多模型复位检测方案的渐近稳定性。这些规定是切换系统稳定性的标准参数(参见例如[17],[19]及其中的参考文献),并保证当任何复位系统流动或当任何复位时不增长时,CQLF的存在能减少系统复位。
规定1:对于给定的Aeta;i,AR和M,(9)和(10)中所示的增强误差动力学是二次稳定的,如果对于所有的i = 1hellip;N存在矩阵P = PTgt; 0和标量tau;Fge;0和tau;Jge;0:
(12)
这是变量P,tau;F和tau;J中的LMIP:
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[140906],资料为PDF文档或Word文档,PDF文档可免费转换为Word
您可能感兴趣的文章
- 饮用水微生物群:一个全面的时空研究,以监测巴黎供水系统的水质外文翻译资料
- 步进电机控制和摩擦模型对复杂机械系统精确定位的影响外文翻译资料
- 具有温湿度控制的开式阴极PEM燃料电池性能的提升外文翻译资料
- 警报定时系统对驾驶员行为的影响:调查驾驶员信任的差异以及根据警报定时对警报的响应外文翻译资料
- 门禁系统的零知识认证解决方案外文翻译资料
- 车辆废气及室外环境中悬浮微粒中有机磷的含量—-个案研究外文翻译资料
- ZigBee协议对城市风力涡轮机的无线监控: 支持应用软件和传感器模块外文翻译资料
- ZigBee系统在医疗保健中提供位置信息和传感器数据传输的方案外文翻译资料
- 基于PLC的模糊控制器在污水处理系统中的应用外文翻译资料
- 光伏并联最大功率点跟踪系统独立应用程序外文翻译资料


