英语原文共 16 页,剩余内容已隐藏,支付完成后下载完整资料
多转子无人机的级联姿态角控制实验研究
采用简单的内部模型控制方法的飞行器
Jun-Beom Song1, Young-Seop Byun2, Jin-Seok Jeong2, Jeong Kim2 and Beom-Soo Kang2,
*1Department of Aviation Maintenance, Dongwon Institute of Science and Technology, Yangsan 50578, Korea
2Department of Aerospace Engineering, Pusan National University, Busan 609-735, Korea
摘要:
本文提出了一种多旋翼无人机姿态控制的级联控制结构和实际应用方法飞行器(无人机)。由于输入输出关系,多旋翼无人机的姿态控制很少使用比单回路控制更严格的控制能力的串级控制,该控制不再仅仅是欧拉角的设定点响应传递函数的单回路PID控制,但是存在多次测量信号和交互式控制回路,这增加了传统设计方式下评估的复杂性。然而,在这项研究中提出了一种可以优化基本控制的方法以及每个回路的次级回路和PID控制器。目前可用的PID调节方法的调查导致选择基于内部模型控制(IMC)和直接合成方法的简单内部模型控制(SIMC)方法。通过分析和实验,本研究提出了一个实现级联姿态控制器的系统程序包括飞行测试,系统识别和基于SIMC的PID调节。所提出的方法已经成功地从多个应用中得到验证,其中应用到滚动轴导致PID-PID级联控制,但偏航轴的应用导致了PID-PI的应用。
关键词:串级控制; 简单的内部模型控制(SIMC); 四转子;多转子; 无人驾驶的航空机; PID控制; 频率扫描
方法;: 系统识别; 姿态控制
- 介绍
近年来,越来越多的无人机(无人机)建成。 从2011年到2020年,总数在这个时期将在世界各地的无人机是预计超过27000台。其中无人机81%小型或小型无人机,玩具或无人机的数量业余爱好市场甚至没有包含在市场调查中[1]。 它在考虑新的大型民用无人机时,无法避免在商用市场上出现更多的小型无人机亚马逊,Google,和许多其他公司。 因此,这将是有益的目前的商业无人机行业以及个人谁正在试图把一个人作为一种爱好,如果一个确定的方法提供飞行控制。
它已在工业中广泛使用,比例积分微分(PID)控制和简单的基于规则的PID调谐方法。 一个更复杂的现代控制方法当PID控制器已经很少使用时为许多人提供了简单和控制性能
几十年。 据了解,超过95%的工业控制回路正在使用PID [2],因为正确设计的PID控制具有相似甚至更好的性能而不是复杂的非线性控制器,如模糊逻辑[3]。 因此,大多数商用飞行控制计算机(FCC)提供PID控制和推荐的增益值个人可以调整到特定的配置无人机目标平台[4,5]。
同时,一个级联控制,这是一个先进的PID控制扩展,已被用于过程控制中包括电机控制,化学流程在内的各种行业控制,锅炉控制,发动机节气门控制等[6]。该串级控制可以提高响应时间并减少当有多个可测量的信号时,负载扰动为一个控制变量。 一般来说,级联控制有一个主循环和次循环,其中更快的动态参与二级循环提供更快的响应和在主要的负载扰动周围有严密的反馈循环决定了相对较慢的动力学跟踪性能[7]。
令人惊讶的是,没有任何商业FCC提供级联控制结构来控制UAV的姿态 - 即滚动,俯仰和偏航角度控制。 当无人机的目标平台是与商用FCC制造商所使用的不同,用户将不得不忍受穷人性能还是必须通过基于规则的方式来调整增益值经验性调整程序 - 即通过反复试验。 因此,一般用户的复杂度最小化将是通常提供商用FCC的主要原因一个单回路PID控制[4,5]。
即使在研究领域,级联控制也很少用于无人机的姿态控制。考虑它在多大程度上采用了级联结构各种各样的系统,令人惊讶的数量如此之少通过级联可以发现无人机的姿态控制文献控制。然而,最显着的研究是通过Czyba和Szafranski [8]。他们提出了一个级联控制用于姿态控制的系统,次级回路提供角度稳定和主回路跟踪性能。他们的方法巩固了基础将级联控制原理转化为姿态控制多转子,其中信号的数量将被限制到可测量的信号,以及分布式功能每个环 - 即通过角速度稳定次循环的控制和角度跟踪通过主循环执行。然而,他们的担心是修改PID控制结构来比较并行形式PID,PI-D和I-PD结构之间的执行性能用梯度下降的优化方法 - 而不是调整方法或通过级联控制进行更严格的控制。 GodboltLynch [9]也展示了级联的另一个例子控制以补偿直升机控制中的小体力。然而,他们的兴趣是为了补偿旋转和平移动力学输入的耦合到所谓的“小身体力量”,这主要是一个问题对于具有动态耦合尾翼的单旋翼直升机转子和主旋翼。
值得注意的是与电机控制相比在典型系统中使用串级控制三个级联回路[10]。 最内层,中间层,并且外部回路各自具有电流,角度的反馈回路速度和角度位置。 因此,电流,转速和绝对测量量是分开的位置是必需的。 但是,在态度控制的情况下无人机的测量通常由3轴提供陀螺仪的角速度和欧拉角提供卡尔曼滤波的角速度积分值带3轴加速度计和3轴磁力计。铝?虽然更多的组件被纳入,它是默认的始终如一的姿态参考系统(AHRS)在无人机中需要。 换句话说,次要测量提供了级联姿态控制变量,没有附加成本[8]。
因此,这项研究源于缺乏研究,更严格的控制,更好的负载扰动性能,以及实现级联控制所需的最小化成本用于无人机的姿态控制,从而受益于当前工业领域的无人机系统。
这项研究的主要目标是找到一个系统识别方法并应用一种分析PID调整方法,并且决定性地,一个容易申请级联的程序态度控制。 然而,范围仅限于垂直起飞和着陆(VTOL)无人机因其悬停而起飞垂直起降能力使其成为各种任务的理想选择,因此预计在当前的无人机中更普遍工业比任何其他配置如传统固定翼,翼身,扑翼等[1]。 之间VOTL无人机是一种四旋翼平台,它是多旋翼平台的最常见配置,被选为示例应用程序,因为它是不可能在一个开环控制。 换句话说,飞行是不可能的四转子全手动控制,姿态控制在四旋翼平台中比在手动可控直升机中更重要[11]。
本文应用该方法的程序和策略首先根据一般问题提出串级控制在级联姿态控制时出现的问题应用于无人机。 目前可用的调查PID调节方法导致选择简单的内部模型控制(SIMC)方法。 从下一节开始,因为这种方法正在尝试开发一种可行的实用方法在工业领域应用,评估所有程序来自于四旋翼平台的真正应用。
- 调整级联姿态控制的程序
2.1背景知识
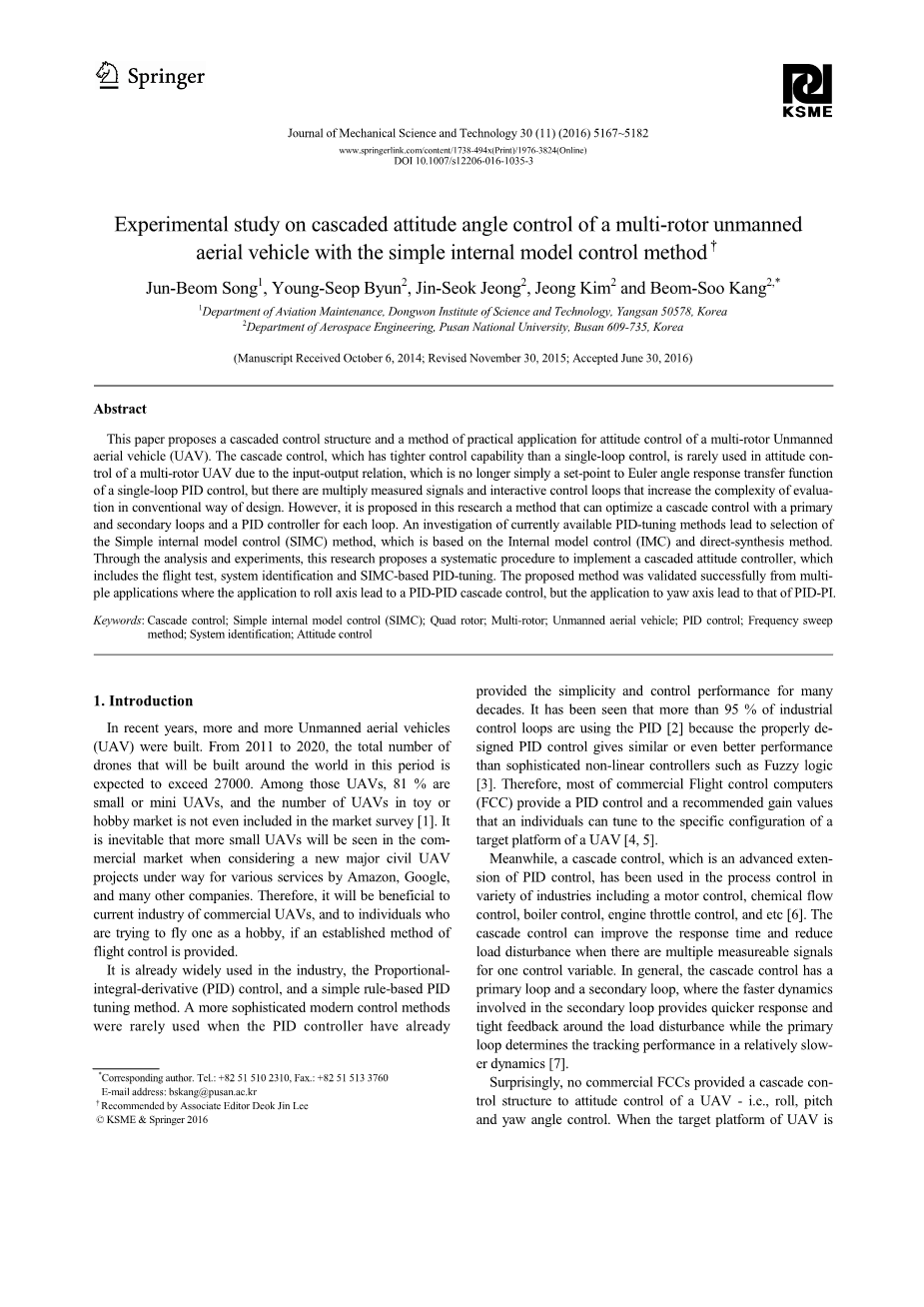
本节提供四转子的一般描述平台和重要的假设和考虑因素目前的应用。四转子是多转子结构之一,四个电机固定在四角它的身体。最常见的小型四转子型号是选择作为目标平台,如图1和2所示。图1(a)和(b)。不需要进一步描述6自由度(6自由度)运动方程因为它已经被许多研究人员广泛开发[8,11,12],但只有少数几个元素来描述当前的应用程序将被处理。
图1(b)显示了电机的结构
推力T T 1 4〜,力矩Q Q 1 4〜,对称力矩臂l。身体固定参考系B:(( b O , b x , b y , b z)和本地水平惯性参考系W:(O,x,y,z)也是显示bx轴指向电机中间的位置#1和#4。也可以使用bx轴指向电机#1,但没有根本的区别,而且它可以自由切换。
本文使用的四转子平台有0.295米长臂为l,起飞重量为3.9公斤(38.3N)。 每套电机的最大推力是大约21 N使用一个长33厘米的螺旋桨,导致总共85 N的最大推力。 作为商业FCC通常提供很高的采样和控制速率,目前典型的应用是利用自主开发的FCC100赫兹的数据采集和姿态控制,同时达到提供400 Hz电动机速度控制。
在整篇论文中,副翼的传统术语,电梯和方向舵将被使用。 副翼对应于控制信号在b x周围产生滚动力矩轴。 类似地,电梯对应于控制信号创造绕y轴和方向舵的俯仰力矩用于围绕b z轴的偏航时刻。 但是,为了方便,副翼,电梯和方向舵将被标准化从电机提供的最大控制力的-100%〜 100%,分别称为AIL,ELE和RUD。 通过标准化控制变量,这是显而易见的使用多少控制力,并且更容易应用限制在plusmn;100%。 从附录A.1可以看出。 对于
这些控制变量的更多解释。
对于总体控制设计,有两个基本的假设:
(a)假设解耦控制输入响应。
(b)假设小角度。
第一个假设仅仅意味着滚动,俯仰和俯仰偏航控制器没有来自AIL,ELE和ELE的耦合状态RUD输入,分别产生一个简单的单输入单输出(SISO)控制设计。 然而,这意味着,所谓的“小体力”的交叉乘积项被忽略,SISO控制通常忽略这个术语设计。 从这个基础上,对六自由度的完整描述对于SISO控制设计来说,运动不是值得注意的。
第二个假设是用转换来描述矩阵C将欧拉角速度omega;转换为身体角速率bomega;如下:
从方程 (1)和(2)中,p,q和r分别是b x,b y和b z轴周围的身体框架角速度,并且f,q和y是滚动,俯仰和偏航的欧拉角,分别。 因此,从第二个假设,转换矩阵C变成3*3大小的单位矩阵,并且
2.2问题的定义
在本文中,一个级联控制是由该结构定义的如图2所示,其中C1 和C2是主要的和二次控制与负反馈,分别。 G1和G2 是可以从G2测量中间变量的物理过程模型。设定点1r给出主要测量变量1y,并且主回路控制C1产生的设定点2r二次测量变量2 y。它被称为是事实级联控制改善了设定点响应,因为二次回路运行速度更快,动力更高增益也会导致负载扰动的改善[10]。利用二次测量变量作为角速度,级联姿态控制 - 即欧拉角控制 - 可以无需任何额外的传感器或从中计算无人机的观点。像这样的小型四旋翼无人机从图1可以看出,无人机挤压有效载荷的流线型结构增加了敏感度能力,级联的态度控制将提供下注表现[13-15]。
然而,与更直截了当的相比单回路控制,这是级联控制的主要缺点系统是由多个控制回路产生的复杂性。如果主控制器C1 是要设计的过程模型不是简单的G G1 2,而是具有不同的形式:
引入G来表示过程模型主要控制者,这是增加的主要原因复杂。例如,一个有效时间延迟为h秒的时间延迟模型将会受到复杂性的影响引起的-H 长期在G1 和G2。因此,对于用于初级控制的过程模型G的模型,级联姿态控制需要一个通用的过程。复杂性的另一个问题是决定使用积分控制和微分控制。同PI-PD和PID-P的例子有时可以避免使用重复I和D控制[10,16,17]。这看起来很明智避免重复使用,以避免发生高温频率导数问题,但是,应该有一些从PID中选择结构的分析方法控制。
由于增益值的增加妨碍了通过简单的基于规则的经验调整实现的最佳增益调整没有一个过程模型,一个级联的一般过程控制设计可以用流程图进行总结在图3中定义,涉及建模。对控制设计进行系统识别(ID)过程以确定过程模型是一种常见的实践[18,19]。控制器的设计和调整是验证过程的下一步。这一过程更加清晰该图表明级联控制的复杂性可能会受到阻碍整个过程如下所示:
(1)系统ID安全问题 - “系统识别”过程必须揭示G2的快速动态 和缓慢G1的动态
,其中G2 可能需要高频率执行器输入可能在某个无人机中存在安全问题并以特定的动态模式。
(2)模型不确定性问题 - 例如,似乎明确了欧拉角和角的物理关系速度导致1 G s = 1 /,但是,确定的G G1 2由于受到污染的噪音,可能根本没有1 / s期限飞行数据。
(3)复杂的G问题 - 在“控制结构设计和控制增益调整”过程中,实际过程模型为主控制器由G1组成 和反馈回路的C2 和G2 这不容易评估。而且,由于到G与辅助控制器C2的相互作用结构,G必须在任何时候再次确定C2 是改变。
(4)PID结构问题 - 什么是最优化的结构相互作用的C1 和C2 不容易分析特别是当G的复杂结构组合时。
从系统识别中的测试程序通过使用可以导出动态的执行输入来阻止来自系统的响应,时域输入和输出数据可以被获取。但是,对于飞行器来说,这个测试是如果没有地面测试夹具,最有可能在空中进行如果飞行器的稳定性较差或不稳定,则应增加额外的控制器以确保飞行器的稳定性安全。即使使用地面测试夹具,实际响应也是如此由于不同,在空气中可能与地面响应不同质量,重心,地面效应等。应该是什么输入信号也是一个问题。通常的输入包括双向波形,3-2-1-1,正弦波扫描和矩形开/关继电器开关[20,21]。无论输入信号如何,它都应该能够导出所需的动态模型知识。
因此,必须考虑概要问题的第一个和第二个问题。第三和第四个问题已经在前面描述过了摘要。从图3可以看出,级联控制复杂度的增加可能需要更多整合优化设计的时间。
2.3级联姿态控制的建议程序
为了解决级联定义的问题控制,已经检查了各种PID调节方法。 在总体而言,PID调节方法可以分为5种方法。 下面列出了猫类检查的结论性意见,其中包括分析方法是最好的选择。
(1)基于规则的经验调整 - 通常用于调整控制器参数以提高期间的性能实验中,这种方法应用了一组简单的规则来预测控制器变化的响应变化获得值[10]。更复杂的用途包括专家系统根据累积人类控制历史的累积数据修改控制器参数表现出习惯[22]。另一
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[21281],资料为PDF文档或Word文档,PDF文档可免费转换为Word
您可能感兴趣的文章
- 饮用水微生物群:一个全面的时空研究,以监测巴黎供水系统的水质外文翻译资料
- 步进电机控制和摩擦模型对复杂机械系统精确定位的影响外文翻译资料
- 具有温湿度控制的开式阴极PEM燃料电池性能的提升外文翻译资料
- 警报定时系统对驾驶员行为的影响:调查驾驶员信任的差异以及根据警报定时对警报的响应外文翻译资料
- 门禁系统的零知识认证解决方案外文翻译资料
- 车辆废气及室外环境中悬浮微粒中有机磷的含量—-个案研究外文翻译资料
- ZigBee协议对城市风力涡轮机的无线监控: 支持应用软件和传感器模块外文翻译资料
- ZigBee系统在医疗保健中提供位置信息和传感器数据传输的方案外文翻译资料
- 基于PLC的模糊控制器在污水处理系统中的应用外文翻译资料
- 光伏并联最大功率点跟踪系统独立应用程序外文翻译资料


