
英语原文共 6 页,剩余内容已隐藏,支付完成后下载完整资料
瓶口定位算法研究
智能空瓶检测系统 *
摘要
智能空瓶检测系统是一种重要的检测设备,在灌装啤酒前是一种重要的检测设备,它是一种混合的机器视觉,精密机器和实时control.控制。他们需要合作,以实现desired effect. In the design of the empty bottle inspection system,预期的效果。空瓶检测系统的设计,其中的关键技术之一是瓶口的位置和bottom which affect the speed and accuracy of the inspection.影响检验的速度和准确性。 在本文中,首先,我们处理的图像的瓶口和底部的去噪,对比度增强和边缘检测,分析了瓶底和底部的位置。最后,我们提出了不同的定位算法的瓶子口和底部的不同的字符。实验结果表明,该方法能有效地提高瓶底和底定位的精度,具有很好的实用价值。
指数条款:智能空瓶检测系统;机器视觉;边缘检测;最小二乘法;随机Hough transformHough变换
- 简介
啤酒生产项目中的一个重要环节就是空瓶检测。因为传统的人工灯检取检测方式很难保证可靠性和不易适应现代高速的要求,导致了一些不合格的啤酒大量涌入市场,给企业形象带来了损害。基于机器视觉技术的智能空瓶检测系统,不仅克服了人工检测劳动强度大、误判率高、生产效率低的缺点,也可通过计算机处理实现生产线的自动控制,大大提高了啤酒生产线的自动化程度。
智能空瓶检测系统是一种高速在线检测设备,集机器视觉、精度machinery and real-time control in one system, it mainly consist of pre-inspection unit, residue inspection unit, bottle mouth inspection unit, bottom inspection unit, bottle walls inspection unit, control unit and man-machine interface unit, as is shown in Figure 1.在 一个系统中的机械和实时控制,它主要包括预检查组,残留检查单位,瓶口检查组,底部检查组,瓶壁检查组,控制单元和人机界面单元,如图1所示。主要实现功能是瓶口破损检查;污垢和异物检查的瓶口,底部和墙壁;瓶内液体残留检验及不合格品检验。瓶口和底部的图像的精确定位是瓶嘴和底检查的重要组成部分,定位精度和定位精度直接决定了瓶口和底瓶的检测精度和速度。
图1智能空瓶检测系统的结构图
本文首先对图像进行去噪、对比度增强。由于该图像的瓶口有明显的边缘和小干扰,我们扫描图像沿着线,选择最大的突变点在行,然后用最小二乘法来拟合最佳的圆。以这种方式,我们可以找到的中心的圆,得到的圆半径。在另一边,底部的图像没有清晰的边缘,有许多干扰来自防滑条纹。我们处理图像的边缘检测和链码跟踪,计算链码的周长。然后,我们过滤掉一些小的杂波边缘设置阈值。最后,我们可以找到底部中心采用一种改进的随机Hough变换。实验结果表明,该方法不仅提高了检测率,而且可以提高检测精度。
- 图像的预处理
在智能空瓶检测系统,由CCD摄像头获得的图像有一定程度的噪音,因为他们的产生和传输过程中受到各种噪声源。同时,瓶在传输过程中的轻微晃动,以及不均匀的照明会导致所获得的图像的灰度增加或突然下降。这会产生一个与一些假物体形成的边缘,从而使图像模糊,然后给图像分析带来困难。因此,有必要采取措施,如过滤噪声的图像预处理方法,正确的灰度与形态的方法来消除噪声,纠正不均匀的照明,然后有趣的特性的图像将突出。
- 图像去噪
数字图像的噪声来源于图像的采集和传输过程。共模噪声,椒盐噪声和高斯噪声[。中值滤波具有良好的性能,在各种随机噪声的滤波和保留的细节的边缘。因此,在本文中,我们使用中值滤波去除噪声:
- 选择模板的大小,沿该行或列方向移动模板图像数据;
- 每次运动后,在窗口中的像素的灰度值;
- 使用所获得的平均值来替换原窗口的中心像素的灰度值。
- 图像对比度增强
由于厚度和颜色不同,即使在同一类型的瓶子,一些瓶的图像颜色太深,有些是过度暴露。因此,动态范围的图像变得如此狭窄,图像的对比度太低。灰度 stretching method can change the partial gray value of the images, control the distribution of histogram and then improve the output effect of the images. The procedure is as follows:拉伸法可以改变图像的部分灰度值,控制直方图的分布,进而提高图像的输出效果。该程序如下:
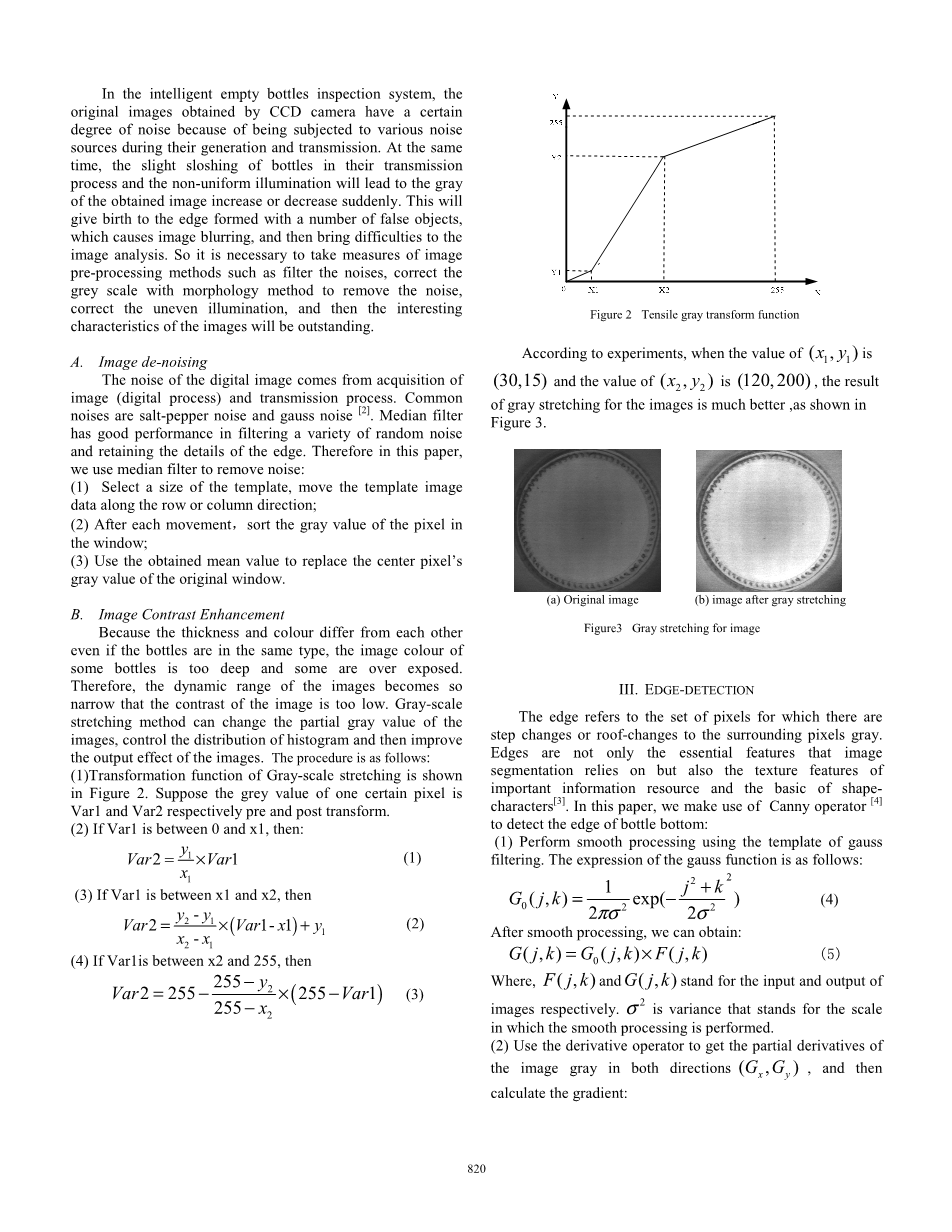
(1)灰度拉伸的转换函数如图2所示。假设某一像素点的灰度值为Var1和Var2前后分别进行变换。
(2)如果var1是0和X1之间,然后:
(3)如果var1 X1和X2之间,然后
(4)如果X2和255之间var1is,然后
图2拉伸灰度变换函数
根据实验,当价值(x1,y1)是(30,15)和(x2,y2)的值是(120,200),灰度拉伸的图像效果更好,如图3所示。
图3 图像灰度拉伸
三、边缘检测
边缘是指一组像素,其中有步骤的变化或屋顶变化到周围的像素灰度。边缘不仅是图像分割的基本特征,也是重要信息资源的结构特征和形状特征的基本特征。在本文中,我们利用Canny算子检测瓶底边缘:
1)利用高斯滤波模板进行平滑处理。高斯函数的表达式如下:
经过平滑处理,我们可以得到:
其中,F(j,k)和(j,k)代表输入和输出的图像分别。sigma;方差代表规模的平滑处理.
(2)使用衍生工具在两个方向上得到图像的偏导数(Gx,Gy),然后计算梯度:
(3)利用步骤(2)计算梯度的方向:
(4)非最大抑制:由于梯度运算会产生大量的边缘,因此有必要进行非极大值抑制。这是可能的,以消除的价值,这是不前沿的价值沿轮廓的梯度。通过方向的梯度,可以固定在梯度方向上的一个像素的相邻像素。如果在中心点的幅度不大于相邻点的梯度线的方向,那么这个点是一个非边缘点。
(5)计算累积直方图的阈值。所有大于高阈值的像素是边缘的元素,而那些小于阈值的像素则不。如果检测结果大于低阈值和小于高阀值,那么它是否是一个元素的边缘是确定的,如果有边缘像素大于其相邻像素之间的高阈值。如果有,那就不是。
图4 瓶底的边缘检测
如图4所示,使用Canny算子检测边缘的瓶底不仅可以有效检测 edges of objects but also filter out partial edge points that are not important ,which is beneficial to the follow-up chain code tracing and image localization.对象的边缘,但也过滤掉部分边缘点,是不重要的,这是有益的后续链码跟踪和图像定位。
四、瓶嘴和底部的位置
在检查空瓶的过程中,摇瓶或倾斜的瓶子会引起每个时间图像的差异。因此,有必要对空瓶进行定位,以确保每一次的图像在感兴趣的区域内精确定位。在实际应用中,空瓶检验的速度可达到最高的20瓶/秒。然而,定位处理算法占据了整个图像处理的大部分时间。因此,快速、高效的定位算法对于提高智能型空瓶检测系统的整体性能至关重要。
图像定位的原理是先将空瓶的特征点固定为锚点。然后搜索锚点,并得到它们的坐标在每个图像。计算锚固点在连续图像的不同值来得到整个图像的偏移,同时,让感兴趣的区域发生相同的位移,以确保它们准确检测区域需要根据锚固点的处理。
- 圆中心定位技术
由于瓶底和瓶底出现在图像上的环和圆,根据圆的几何特征,很明显,瓶口的位置和底部的位置是一样的,对圆的检测,发现中心和半径的精确。目前,主要的方法包括使用Hough变换圆检测检测圆的拟合圆,边缘检测和最小二乘法[,模板活性界等配套。我们采用不同的定位方法,根据图像特征的口和瓶底。在图像的嘴巴,边缘的圆圈是比较清楚的,并具有较高的对比度和干扰较小。因此,本文采用边缘检测和最小二乘法相结合的方法,得到了中心和半径。因为在底部的防滑条和文字图像干扰,准确地找到边际点是很难的。对这些方法的分析比较后,我们采用链码跟踪结合Hough变换检测本文圈。该方法不仅解决了传统Hough变换速度慢的缺点变换,也可以准确地获得圆的中心。
B.瓶口位置
由于瓶生产过程中工艺差的因素和回收瓶的使用,并不是所有的瓶内图像都是标准圆,甚至出现了一部分图像内部和外部的干扰。针对这种复杂的情况,我们采用基于直线和最小二乘法拟合圆的灰度突变点扫描来完成瓶子图像的定位。
- 基于直线的灰度突变点扫描
在低角度环形灯照射下,瓶子密封的倾斜表面会形成一个封闭环。这些环有规则的灰色分布和明显的局部灰度变化。因此,我们可以采取基于直线扫描的灰度突变点来搜索直线上的灰值点,即边缘点,如图5所示。输瓶时,瓶嘴的位置可能偏离对图像序列中的X方向和Y方向和偏移距离在30像素的范围,您输入的可能是:意大利语
so we select the linear interest region of spoke-structure, setting 24 spokes (we can search for 48 edge points), and the deviation of the spoke inner and out diameter is 60 pixels. Along each straight line of the spoke, we scan the point from outside to inside. Suppose the experience value is F1 and F2.
所以我们选择感兴趣区域的线性轮辐结构,设置24条(我们可以搜索48个边缘点),和轮辐内外径偏差为60像素。沿着每一条直线的发言,我们扫描点从外面到里面。想体验价值是F1和F2。
首先,对点搜索(x1i,y1i)的灰度值变化超过F1的扫描方向,然后继续扫描点(X2i,y2i)的灰度值的变化是超过F2在同一方向。最后,我们可以得到两个数组P1和P2构成的点,如图6所示。
图5 基于直线的灰度直方图
图6 瓶扫描的边缘点
- 最小二乘法拟合圆
假设圆的标准方程x2 y2 Dx Ey F=0和取代上述几点到这个方程时当
然后我们可以有一个线性方程:
AX B (8)
和最小二乘解
在形式上可以给出最小二乘圆
中心和半径的坐标是
因此,我们可以得到中心坐标和半径。
图7 最小二乘拟合圆
图7中的红色圆圈是最小二乘法拟合圆,红色十字点确定中心位置。
- 瓶底定位
- 链码跟踪
边缘检测后,图像中含有丰富的边缘信息,具有一些不重要的点或点与位置无关。这些不必要的边会影响瓶底定位精度。因此,在检测到的边缘,我们必须使用链码跟踪过滤掉杂波边缘,根据计算的周长链码。链码是一种有效的对象描述形式,有利于计算目标特征,如周长、面积等。周边可以给予:
在链码中的偶数表示水平方向和垂直方向,奇数表示另一个方向。
利用链码跟踪方法计算每个边缘的周长,根据设定的周长阈值,我们可以去除不必要的边。在Canny检测,瓶底边缘不连续的位置有时。在本文中,阈值的周长被设置为100,通过反复测试。
- 随机Hough变换圆检测算法
Hough变换具有精度高、抗干扰性强的特点,可应用于任意曲线形式的检测分析。然而,其明显的缺点是计算复杂度和速度慢。因此,随机Hough变换算法通常用于需要快速检查情况。
随机Hough变换算法是选择最小点集的随机图像空间,然后映射到参数空间中的一个点。由于该算法属于多对一的映射,它避免了传统的Hough变换的计算复杂度大。最小点集的外圈是由三个共线点的边缘构成的。该算法的步骤如下:
lt;
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[148593],资料为PDF文档或Word文档,PDF文档可免费转换为Word
您可能感兴趣的文章
- 饮用水微生物群:一个全面的时空研究,以监测巴黎供水系统的水质外文翻译资料
- 步进电机控制和摩擦模型对复杂机械系统精确定位的影响外文翻译资料
- 具有温湿度控制的开式阴极PEM燃料电池性能的提升外文翻译资料
- 警报定时系统对驾驶员行为的影响:调查驾驶员信任的差异以及根据警报定时对警报的响应外文翻译资料
- 门禁系统的零知识认证解决方案外文翻译资料
- 车辆废气及室外环境中悬浮微粒中有机磷的含量—-个案研究外文翻译资料
- ZigBee协议对城市风力涡轮机的无线监控: 支持应用软件和传感器模块外文翻译资料
- ZigBee系统在医疗保健中提供位置信息和传感器数据传输的方案外文翻译资料
- 基于PLC的模糊控制器在污水处理系统中的应用外文翻译资料
- 光伏并联最大功率点跟踪系统独立应用程序外文翻译资料


