
英语原文共 5 页,剩余内容已隐藏,支付完成后下载完整资料
对基于CCD的自适应前照明系统的建模与仿真研究
Fengqun Guo1, Hui Xiao2, Shouzhi Tang3
- College of Electronic and Information Engineering, Tongji University, Shanghai 201804, China
E-mail: guofengqun0511@163.com
- College of Electronic and Information Engineering, Tongji University, Shanghai 201804, China
E-mail: xiaohui@tongji.edu.cn
3. College of Electronic and Information Engineering, Tongji University, Shanghai 201804, China
E-mail: tomson711@126.com
摘要:本文分析了汽车前照灯配光性能的转弯时,开发的一种新的AFS(自适应前照明系统)基于CCD(电荷耦合器件)明显优于传统的AFS。这个新的AFS用CCD图像传感器检测的角点信息然后将曲率半径提前到电子控制单元。同时,电子控制单元将通过速度和曲率半径计算大灯准确的旋转角度,并将其发送到电机调整大灯的照明光束,得到适用于角落。同时,电子控制单元将通过速度和曲率半径计算大灯准确的旋转角度,并将其发送到电机调整大灯的照明光束,得到适用于角落。
关键词:光度特性 自适应前照明系统 电荷耦合装置 曲率半径 水平旋转角度 建模与仿真
1引言
随着社会经济的发展,越来越多的车辆在我们的日常生活中使用,因此,越来越多的交通事故发生。文献1显示,82%的交通事故发生夜间没有良好的照明条件。文献2-4表明夜间严重事故的数量大约是1.5天时间,60%的事故发生在贫穷里的角落战争。其主要原因是车辆在夜间转弯时无法调节光轴的范围和方向,视觉“盲区”就在拐角处出现。这种视觉“盲区”是由固定的照明领域的拐角处造成的。当驾驶时,驾驶者的视线被囚禁在发射光束的线性范围内,因为惯性,并且更容易引起交通安全隐患。基于此,“自适应前照明系统”,即AFS,应运而生。
自适应前照灯系统是一种主动的安全系统,它可以自动改变道路条件、驾驶条件等不同的外部因素,自动改变2种或多种类型的光照类型天气状况等。例如,在城市里开车,灯光会柔和,没有刺眼,因为足够的照明,从道路灯。然而,在某种程度上,虽然当前Y可以提高现有AFS在街角的驾驶安全性,系统具有一定的局限性:明显滞后和精度较低,这是由反应时间,司机需要将转方向盘引起看到前面的角落。在这个时候,如果前方的障碍和驱动程序不够准备,很容易造成事故。因此,尽管传统的AFS主动安全领域发挥了重要作用,其局限性也不可忽视。基于这一点,本文提出了一种自适应前照明系统基于CCD的比传统。这种新的AFS采用CCD图像识别技术从一定距离处的信息收集。然后,它调整不同的血管紧张素先将前照灯照到的角落信息收集。之后,它将满足大灯预调节保证光覆盖区进入一个角落避免外观的照明视觉“盲区”。这种方式,可以提前适应角条件下通过CCD取消计算角半径的转向角度传感器。作为一个结果,它弥补了明显滞后和较低的前照灯旋转角度传统AFS系统的局限性,实现了主动旋转的大灯。同时,灯光可以引导司机到做正确的操作,当进入角,所以AFS角落照明系统基于CCD图像识别技术是一种真正意义上的主动安全系统。
2基于AFS的前照灯的灯光分布
前大灯是最重要的主动安全功能,使前照灯的光分布,已成为一个重点和难点。因此,前照灯暮光分布满足所有这些需求如下:足够的照明,无眩光,足够的照明范围。
2.1光照分布
GB4599《光学性能的汽车前照灯》明确规定以下车辆的车灯光分布的M型和N型(两种国产车):李近光灯光分布是不对称的,具有明显的截止线,线的上面是暗区和下部的亮区,如图1所示。图2显示了前照灯光束分布。光照分布较不对称,有明显的截止线,线下的上方是暗区,下部是亮区,如图1所示。图2显示了前照灯的光束分布。
图1 型非对称光分布图
图2 前照灯光束分布的例子
2.2基于AFS的大灯的光环境
首先,现有的汽车自适应前照明系统(AFS)可以检测驾驶员的转向操作和交通状况通过传感器。通过这种方式,它可以得到方向盘角,速度和身体高度信息,这是需要的。然后计算旋转角度的大灯。最后,它旋转大灯通过驱动器供应供应角最佳的照明效果。
图3 比较进入拐角时有AFS和没有AFS的区别
图3比较了大灯的照明范围两种条件下行驶时,在拐角处。在左半部分的图3,当进入拐角,因为车辆的照明光束没有AFS是沿方向行驶,大部分的光束投射到右区,左凸出部分变窄,因而可能会无法识别在左前分障碍。与图3的右半部分显示,当具有AFS的车辆进入角落,照明大灯可以顺利点亮离开左障碍区。
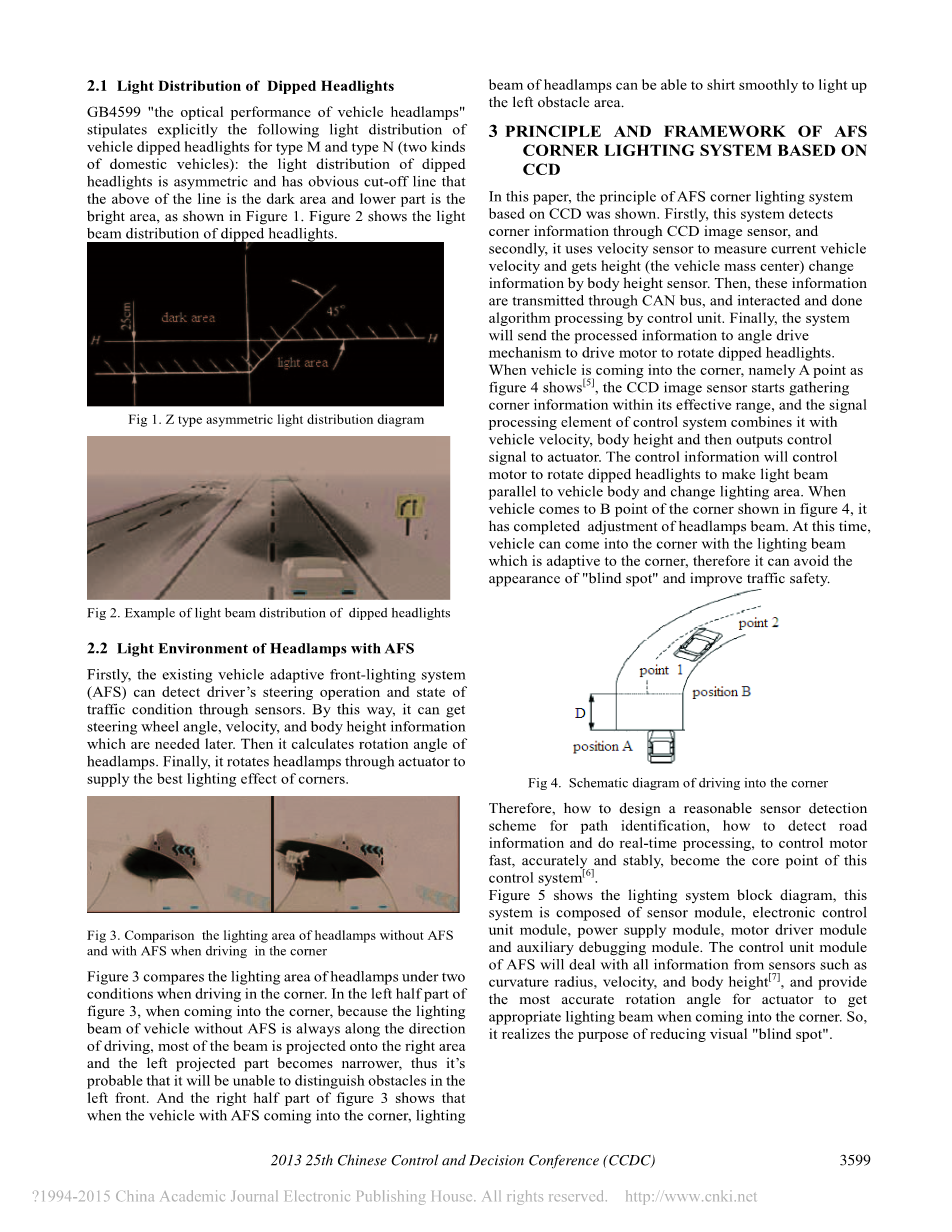
3基于CCD和AFS角落照明系统原理
本文证明了基于CCD的AFS角落照明系统的原理。首先,该系统通过CCD图像传感器检测到的角点信息,其次,它采用速度传感器测量确定当前车辆速度,并通过车身高度传感器获取高度(车辆质心)变化信息。然后,这些信息通过CAN总线,并相互作用,完成算法算法处理控制单元。最后,将处理后的信息发送到角驱动机构,驱动电机旋转下降的前照灯。当车辆进入拐角,钠这位母亲一点如图4所示,CCD图像传感器,其有效范围内开始角信息收集及控制系统的信号处理单元,结合车辆速度低速,身高,然后输出控制信号,执行器。控制信息将控制电机旋转,使光线平行于车身和改变照明意。当车来到如图4所示的角点,完成了前大灯光束调整。在这个时候,汽车可以与照明光束,我在角落里因此,它可以避免出现“盲点”,提高交通安全。
图4 拐角处驾驶示意图
因此,如何设计一个合理的路径识别传感器检测方案,如何对道路信息进行检测和实时处理,对控制电机快速、准确、稳定,成为一种合理的检测方法该控制系统的核心点。图5显示了照明系统框图,该系统由传感器模块、电子控制单元模块、电源模块、电机驱动模块和辅助调试模块组成。这个AFS控制单元模块将处理所有的信息从传感器如曲率半径、速度和身高,并提供最精确的角度旋转驱动器得到适当晚照明光束进入角。因此,它实现了减少视觉“盲区”的目的。
图5 基于CCD的角落AFS照明系统框图
4大灯水平旋转角和仿真建模
对于出现的视觉“盲点”里面的角落时,进入一个角落是很容易的,所以为了获得大灯光束,自适应提前角,本文提出了一种Headlamps水平旋转角度的模型。通过这个模型,它确保没有视觉的“盲点”内拐角处转弯时。当开车到拐角处时,司机转动方向盘,然后将它打开改变一定的角度,从而导致车身前进。在这个时候,前大灯光束,原本平行的道路表面会产生倾斜,造成前方照明面积减少通过。然而,由于导光效果的光束,在拐角处的司机的视野将窄于驾驶直。此外,它是狭窄的地平线驾驶在一个角落里这对交通安全非常不利。因为车身高度是一个及时的状态而不是被提前预测,和即将到来的改变不能得到先进的CCD图像传感器,因此,一些在一定程度上,没有必要事先获得车辆车身高度的变化。因此,本文仅研究大灯水平旋转角度的模型及模拟。
4.1停止视距
在驾驶过程中,当看到前面的障碍,最极端的行为是制动硬。最短距离的安全停车起步制动,以到达前方的障碍是呼叫停止视距。主要包括三个部分:反应距离、制动距离和安全距离。反应距离和制动距离的车辆安全制动距离。它们的对应关系如图6所示。
图6 停车视距
JTG D20 -2006《公路路线设计规范》和JTG B01-2003《公路工程技术标准”作出了具体的规定分别对停车视距的公路各级O每个车道和最小半径的一般圆曲线,其对应关系如表1所示。
表1 速度、停车视距与普通圆曲线的最小半径的对应关系
表1显示当速度超过100公里/小时,公路圆曲线最小半径一般值大于500米,最大半径时,汽车大灯开始转向ECE R48监管工作模式的规定。因此,设计的AFS的旋转角度,相应的车辆运行速度100公里/小时下根据数据特点给出停车视距,它可以用二次拟合得到近似的关系,这些已知的数据在MATLAB中的最小二乘法。即速度和停止视距有关系式(1),圆曲线最小半径的“一般值”与速度之间的关系式公式(2):
(1)
(2)
4.2水平旋转模型的前大灯
当进入拐角处,例如,向左转,正常的光束会导致明显的视觉“盲点”在角落里。如果此时车辆进入拐角处,它的驱动程序将无法由于“盲区”的影响,明显地看到前方的障碍,交通事故变得容易发生。因此,为了避免“盲点”,晚上的时候转弯处,黑德兰PS需要旋转一定角度,保证有效的制动距离,也就是说,前大灯(近光灯)照明光束可调光的“盲点”里面的角落。
图7 汽车左转模型图
从图7 ,汽车前照灯的水平旋转角度的计算公式如下:
(3)
(4)
其中:
S:停车视距,从公式(1)计算出的;
V:电流速度;
R:角半径;
R0:最小半径“圆曲线”,从公式(2)计算
根据不同的旋转方向,旋转角度是不同的:前大灯右转弯时,右近光灯旋转光束照亮道路的右侧;左转弯时,我EFT近光灯旋转照射左侧。图8显示了水平旋转角度模拟对应不同曲率半径的不同速度下用MATLAB。
图8 对应不同的曲率半径不同速度下水平旋转角度
图9示意图左转弯时,车辆安装了AFS照明系统基于CCD图像传感器。图9显示了在直线行驶时,这是一个图你9,前照灯光束平行于车道,有足够的光来照亮前方的路。当车辆进入角,B点如图所示,它调整梁事先通过AFS系统透射电镜要适应前角,现在车辆进入拐角处,不再出现视觉上的“盲区”。当走出拐角时,根据情况的前面的道路,光束被调整为平行的车道和自适应驾驶再次。
图9 拥有新的AFS的汽车左转示意图
图9显示了这个新的AFS车辆大灯光束分布在左转弯时。这个新的AFS系统检测到车辆的速度,通过速度传感器,从而获得停车视距,通过CCD图像传感器获得的曲率半径R,从而得到一个旋转角度theta;在水平方向,然后得到照明光束是自适应角通过执行电机(电机)在水平方向旋转的大灯。
5结论与展望
目前,国内和国外的AFS系统,现有的两个方法得到曲率半径有较大的误差,和旋转角度控制精度较低。基于这些,本文介绍提出一种新的AFS大灯照明系统基于CCD和得到曲率半径信息,明显优于现有的两种方法的新方法。这种新方法是计算已故的曲率半径根据实时信息由CCD传感器检测。一方面,旋转光束的运动要比转向驱动轮的运动要早。同时,这一新的AFS光束可以积极引导驾驶员的视线反映AFS的积极思想,进而提高AFS控制系统的智能化和主动性的特点。在另一方面,基于CCD图像识别技术提出了AFS系统不仅是角落照明,也能在未来成为提供综合信息识别由于CCD图像传感器的快速捕获能力。所以很可能创造一个全面的AFS系统可适用于复杂的道路条件,包括路面水、角、高道路,农村公路和城市道路等。这种AFS系统提前的感知并获得复杂的道路条件,并调整相应的光分布格局。因此,CCD图像识别技术以其高灵敏度、高地震重电阻和低成本将AFS是一种未来的发展方向。
参考文献
[1]Kobayashi S, Takahashi K, Yagi S. Development of New Forward Lighting Systems with Controllable Beams [J]. SAE Paper. 1997(249): 19-35.
[2]Kobayashi S. Intelligent Lighting Systems: Their History, Function and General Direction of D
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[148141],资料为PDF文档或Word文档,PDF文档可免费转换为Word
您可能感兴趣的文章
- 饮用水微生物群:一个全面的时空研究,以监测巴黎供水系统的水质外文翻译资料
- 步进电机控制和摩擦模型对复杂机械系统精确定位的影响外文翻译资料
- 具有温湿度控制的开式阴极PEM燃料电池性能的提升外文翻译资料
- 警报定时系统对驾驶员行为的影响:调查驾驶员信任的差异以及根据警报定时对警报的响应外文翻译资料
- 门禁系统的零知识认证解决方案外文翻译资料
- 车辆废气及室外环境中悬浮微粒中有机磷的含量—-个案研究外文翻译资料
- ZigBee协议对城市风力涡轮机的无线监控: 支持应用软件和传感器模块外文翻译资料
- ZigBee系统在医疗保健中提供位置信息和传感器数据传输的方案外文翻译资料
- 基于PLC的模糊控制器在污水处理系统中的应用外文翻译资料
- 光伏并联最大功率点跟踪系统独立应用程序外文翻译资料


