英语原文共 8 页,剩余内容已隐藏,支付完成后下载完整资料
基于神经网络模型的桥墩活荷载分析
——土木与海岸工程系,弗罗里达桥梁软件协会,弗罗里达大学
概述:
车辆活荷载对桥梁上部结构实现在桥墩最大作用效应的定位是一个重要的设计问题。公路桥梁,为上部结构设计荷载最不利位置通常不产生坏的作用对桥墩的设计。因此,对桥墩的荷载的正确定位是留给了工程判断。本论文研究了并实现的神经网络预测的最大负载为桥墩定位。网络工程预测了负载定位单、多柱墩给定输入参数描述的桥墩和桥结构。本文提出的方法是为了给设计师和许多工程师提供了一种使用误差负载定位法。
关键词:桥;桥墩;车辆;活荷载;神经网络。
1.简介:
桥梁及其支撑结构分析墩基础是一个有趣的课题,这个课题经常引起许多结构工程师之间的争论。现代高速公路桥梁设计必须考虑荷载的变化桥梁及其应用的不确定性。特别地,车辆活载的应用并不简单。在任何特定时间,车辆可以穿过这座桥未知的速度和路径产生不同的力量影响. 幸运的是,正确的应用程序的车辆荷载对桥梁上部结构已记录在案美国国家协会,高速公路和交通管理协会(AASHTO)以及其他研究机构。然而,随后的应用程序这些活荷载对桥墩的支撑还不很好理解,只是简单地解决AASHTO-LRFD设计规范[1]。
一个常见的情况时,确定的上部结构和墩的最大受力效应基础。车辆活载的应用
上层建筑达到最大受力的影响上层建筑不一定产生最大墩基础受力效应。换句话说,一个完全不同的活载应用程序可能产生墩基础的最大受力效应。活载组合的一个详尽研究桥面可以产生数百种可能设计荷载。最关键的活载位置可以通过学习的结果,所有的活荷载组合。这通常是通过计算三维影响面桥梁上部结构。试图绕过这个繁琐的过程,本文介绍了神经网络预测桥宽的活载位置在桥墩基础上实现最大的受力效应。网络使用几何输入参数描述结构和生产卡车和车道的负载位置每一个输出的设计车道。
神经网络的应用研究公路桥梁荷载是一个相对较新的课题只有少数研究者利用神经网络分析活载及其在桥梁中的应用。Gagarin等[ 2 ]实施神经网络预测卡车从应变的属性,一个遍历的响应读数卡车。consolazio [ 3 ]用神经网络预测一二跨桥梁下活荷载作用下位移形状迭代方程解算器的一部分。最后,lertpaitoonpan[ 4 ]研究桥墩的活载产生最大的力效应,虽然神经网络在工作中没有实现。
2.桥墩建模
在这项测试中的模型使用的FB-PIER程序[ 5 ]。的FB-PIER程序地址用有限元分析墩基础的独特行为土-结构相互作用的单元技术。元素组成,特别是发展模型的非线性行为的土壤,以及在结构材料和几何非线性构件。用于桥墩造型的元素基础FB-PIER解释如下。
对于每一个模型,可以模拟桩的线性使用标准梁元素的弹性行为使用离散元法的非线性行为[ 6 ]。目前,16个构件是用来模拟每一桩。土壤是仿照使用不同的非线性负荷-位移、p-y、和t-z曲线土壤类型。土壤弹簧连接到每个节点桩。桩帽是仿照使用一个单一的层9节点Mindlin壳单元,允许横向剪切变形。包含剪切变形特别重要的,因为桩帽通常是非常厚的混凝土块。
墩结构也为蓝本,使用线性弹性梁单元或非线性离散元。桥墩柱和墩帽的基础上
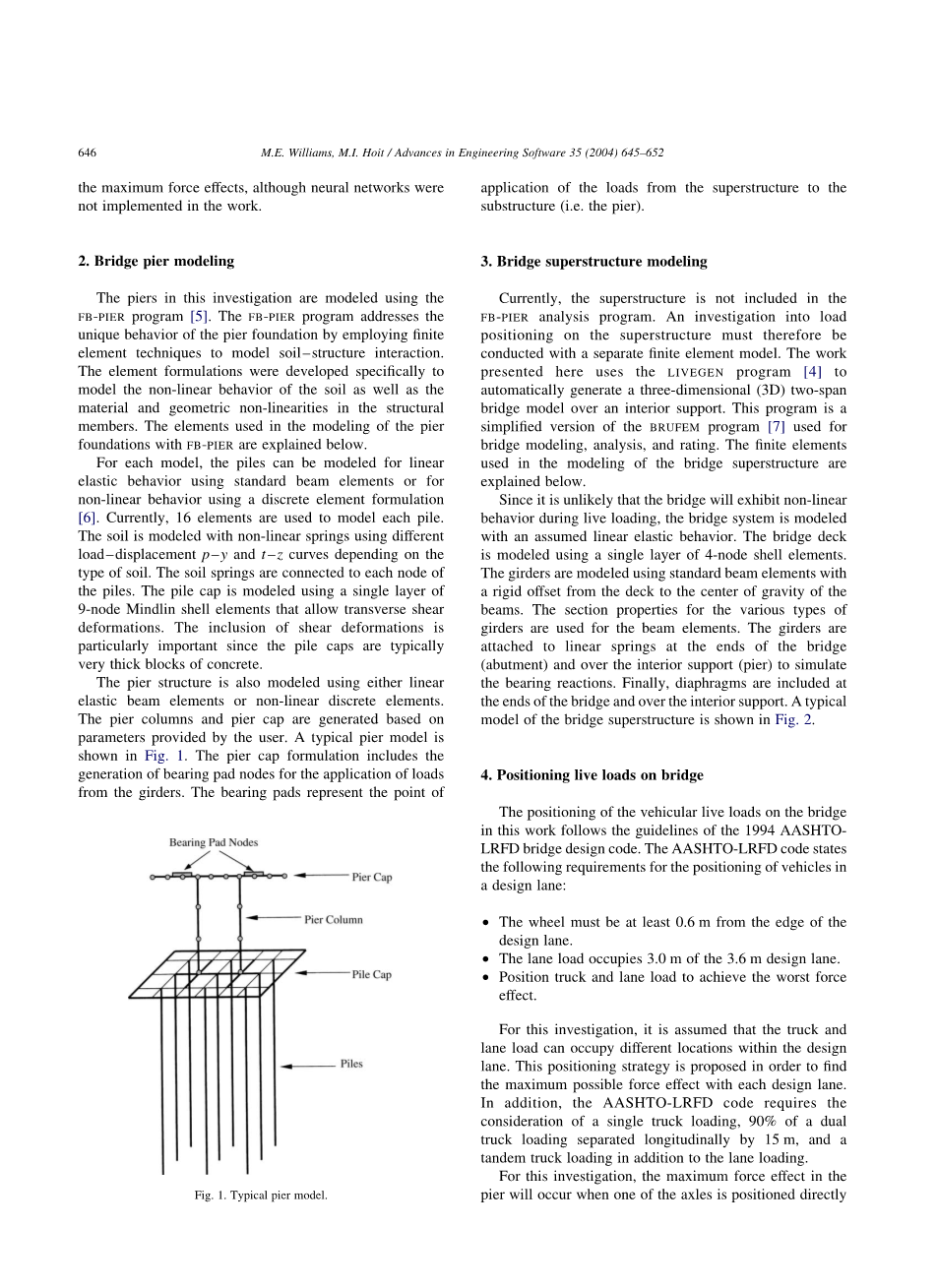
用户提供的参数.。桥墩柱和墩帽的基础上,用户提供的参数。典型的墩型图1。墩帽配方包括荷载作用下的承载瓦节点的生成从梁轴承垫片代表点荷载从上部结构中的应用子结构(即墩)。
3.上部结构建模
目前,上层建筑不包括在FB-PIER分析程序。负荷调查因此,在上层建筑上的定位必须是用一个单独的有限元模型进行。工作这里介绍使用livegen程序[ 4 ]来自动生成一个三维(三维)双跨桥模型的内部支持。这个程序是一个该brufem程序[ 7 ]用于简化版桥梁建模,分析和评价。有限元用于桥梁上部结构的建模下面解释。
因为它是不可能的桥梁将表现出非线性在活荷载作用下,桥梁体系为蓝本
与假定的线性弹性行为。大桥桥面使用一个单独的层的4节点壳单元模拟。用标准梁单元模拟梁从甲板到重心的一个刚性偏移梁。各种类型的节属性梁是用于梁单元。梁是连接到桥的两端的线性弹簧(基)及以上的内支架(墩)模拟轴承反应。最后,隔膜包括在endsofthe桥的内部支持。非典型桥梁上部结构的模型如图2所示。
4.确定桥上活荷载位置
桥上车辆的定位在这项工作中遵循1994 AASHTO指南—LRFD桥梁设计规范。美国AASHTO-LRFD代码对车辆定位的以下要求设计车道:
1.车轮必须至少0.6米的边缘设计车道。
2.车道荷载面积3 m 3.6 m设计车道。
3.位置车和车道荷载达到最大的力量效果。
对于这项调查,这是假定的卡车和车道荷载可以在设计中占据不同的位置车道。这一定位策略的提出,以找到每个设计车道的最大可能的力量效果。此外,AASHTO-LRFD代码的要求考虑单一卡车装载,90%的双卡车装载纵向分开15米,和一串联卡车装载的车道荷载。
对于这次调查,最大的力量效果在当一个轴被定位时,将发生墩在室内码头的支持,如图所示的设计卡车在图3。换句话说,一个145 kN轴重从设计货车或一个从110 kN轴重设计串联将永远被放置在内部支持。注意车辆装载方向取决于两者的长度。自这调查使用的三维桥模型,轴负载是进一步分为车轮载荷更准确地模拟车辆。此外,车道的负载被施加到这两个跨度作为压力(覆盖3米宽的pound;跨度)获得最大墩反应。
由于纵向卡车的位置是已知的,卡车或串联的负载只需要被定位在桥的宽度,以找到最大的力量的影响。同时,车道的负荷也需要移动在设计车道如图4所示为三设计
车道不幸的是,个别负载的组合在设计车道的位置,加上数量加载的车道可以很容易地产生数以百计的可能根据负载定位的负载组合增量。这种方法显然是不可行的例程设计。
这项工作实现神经网络预测加载放置,以产生最大的力效应码头。这是通过分析许多不同的码头所有可能的负载组合,并确定最坏的负载情况。这涉及到计算的几个阶段。首先,所有可能的负载情况下为每个桥在内部产生和轴承垫反应每一个负载情况下的支持。轴承垫每个负载情况下的反应,然后应用到码头在一个码头FB-PIER模型进行分析。产生最坏力组合的负荷情况码头被记录。神经网络,然后训练学习负载定位之间的关系。产生最大力量效应的桥梁和案例在码头。神经网络的简要说明如下在进行桥梁墩的应用前。
5.神经网络
神经网络提供了一种有效的数字技术要映射输入源和输出之间的关系反应。这个过程是通过实施一个高度一类学习型神经元的并行系统存储输入和输出参数之间的关系。虽然神经网络的发展已深深扎根于生物科学,更近神经网络的应用已扩大到包括人工智能和问题的问题解决。迄今为止,神经网络已经成功实施的应用程序,涉及模式识别,优化,系统鉴定,和功能逼近。
神经网络的应用继续增加,鼓励读者阅读作品通过Hecht-Nielsen [ 8 ]和[ 9 ]更多Wasserman关于不同类型发展的信息神经网络有多种网络结构可供解决问题。最常见的网络是前馈型。在前馈网络中,信息通过并行处理从输入源处理收集神经元产生的输出响应图5。前馈网络最常学习输入源和输出之间的关系响应通过一个训练过程称为错误反向传播[ 10 ]。这个培训过程包括送一组已知的输入参数网络。输出的网络相比,一个预定目标响应集。连接所有的神经元之间的权重,然后调整到最终产生的最小误差之间的网络整个训练集的输出和目标值。验证问题,不包括在训练中设置,然后用以评估的有效性网络预测。在一个训练有素的网络,输出回应应该是非常接近的答案验证问题。
神经网络在这项工作中的应用,利用NETSIM程序consolazio [ 3 ]写的创建和训练网络。对于网络配置,输入参数描述的桥梁和桥墩的几何形状和输出响应是在每个设计中的活载位置车道。由于行为的显著差异单柱与多柱墩,采用不同的网络配置来预测双墩型的荷载定位各网络配置由2个计算层(一个隐藏层和一个输出层)映射关系输入源和输出响应。以前的参数作者表示,网络拓扑结构的研究表明这个单一的隐藏层配置是足够的编码问题。在隐藏的神经元的数目层被确定使用网络修剪算法优化隐藏层的大小。乙状结肠激活功能是用于隐藏层中的神经元输出层。单一和多个执行柱墩概述如下。
6. 单柱墩的网络结构
在本节中提出的公式地址单柱墩现场荷载的定位。这些单柱墩,或“锤头码头”在活荷载下分析比较直观。结果可以很容易地通过手工计算验证并为验证网络的结果。
以前的workindicated一负载定位通常不产生所需的所有最大力量的影响为墩设计。目前的工作确定了四个独特的必须确定的力效应:
1.最大力组合(轴力/力矩)在桩。2.最大力组合(轴力/力矩)在墩柱。
3.在墩帽最大剪切力。4.最大弯矩在墩帽。
因为有四种不同的力量的影响,四个神经网络被创建,以确定最坏的负荷每个力效应的定位。描述桥梁和桥墩的输入参数配置是首先需要分类的问题。这些不受限制的程度参数,但是,以前的研究表明,使用非尺寸参数是最有利的网络功能本研究利用四非门—三维参数如图6所示的分类单柱墩。四个参数是设计的数量车道,归一化的跨度长度(跨度长度总和由一个30米的参考跨度,梁间距除以分为墩帽悬臂长度和桩间距除以桩帽的宽度。
归一化输出参数被用来描述横向载荷定位。这项工作考虑最大的四个设计车道与不同的卡车(或串联)和每一个车道的车道位置总的八个输出神经元代表输出反应。使用输出神经元的车道和卡车定位提供的灵活性,以获得不同的负载设计车道内的位置。定位是采取从左边的边缘的归一化的距离,以如图7所示,装载重心的中心。无人的小巷,神经元的输出为零。
为网络的训练集的基础上的码头现有公路桥梁结构。训练集,对于每一个的四个网络,目前由28个桥由于有限的可用性的结构,作为内置的数据。这套训练集可以在新的桥墩上扩展设计或旧桥墩进行分析。验证问题包括三个新的码头,最坏的负荷考虑所有可能的活载确定的位置职位。
四个网络被训练,直到一个最大的训练误差容限为5%。训练和在表1中给出了验证结果最大误差和平均均方根(均方根)误差。对于这项工作,平均均方根误差被定义为整组训练集均方根误差的平均值。该错误以十进制形式出现,其中1将代表100%错误和0将代表0%误差。如表1所示,平均有效值训练误差不超过1%,平均有效值验证错误不超过4%,为四个网络。这个低的错误从训练和验证阶段表明网络似乎是训练有素的,可以能够概括解决新问题的方法。
7.单柱墩荷载预测
为了评估网络的有效性预测,从网络预测的负载验证的实际设计荷载码头。问题的码头是一个单独的柱墩图8。桥墩两侧的桥梁跨度为32米。从网络预测负载轴承垫负载将位置与实际设计荷载进行比较。对于这个特别的例子,我们寻求找到最大的墩帽的弯矩。给定输入参数对于码头,网络预测,只有外部在图8中所示的位置应占用车道。路边的距离到卡车和车道的中心负荷是1.42米的网络预测,作为比较到1.5米的设计计算(基于AASHTO-LRFD定位准则)。结果显示在悬臂梁的基础上的弯矩网络预测的负载和设计荷载即使轴承垫的反应是相同的不同的。这是不寻常的,因为设计荷载计算的杠杆规则,而预测的负荷从三维有限元模型。剩余的网络预测可以比较
实际设计荷载以类似的方式。
8. 多柱墩的网络配置
在本节中提出的公式地址多柱墩活载的定位。与单柱墩网络,四种力效应被确定为设计的码头。四网络创建确定为四个不同的负载定位力效应。
这项工作利用六个非尺寸参数在图9中显示多个列墩。前三个参数是设计车道的数量,的归一化的跨度长度,和明确的宽度道路(桥宽)除以梁间距。其余三个参数为墩柱间距由主梁间距,墩帽悬臂梁长度除以墩柱间距和桩桩帽宽度除以间距。应该注意的是墩柱间距除以梁的间距间距的目的是删除任何依赖于从问题描述中的墩柱数量。因此,该神经网络可以用来解决问题多墩柱结构。
八个标准化的输出参数被再次使用描述横向载荷定位。自编码结构行为多为复杂
柱墩,10个神经元被包含在隐藏层中帮助分类。
为网络的训练集的基础上公路桥梁中的桥墩结构。训练设置,为每四个网络,目前由47由于有限的可用性的桥梁结构建筑数据。验证问题再次由新码头考虑所有的最坏负荷位置可能的活载位置。
与单柱墩网络不同的是,它不是尽可能培养多个柱墩网络给定输入的最大误差容限为5%参数和训练集。当训练不能到达误差容限,训练被停止时验证错误开始到达最低限度后开始增加误差值。网络统计表2。最大均方根误差为4%最大均方根误差为20%。从训练和验证错误并不低如单柱墩。特别是桩力组合网络误差显著增加大多都可以归因于复杂的行为土壤。错误的整体增加最有可能是由于多柱墩更为复杂的行为。这个错误可能会被减少与包含更多的培训问题和完善的投入参数。
9.多排柱墩活荷载预测
网络预测的有效性也可以多柱墩评价。要实现这一,从网络预测的负载再次相比验证码头的实际设计荷载。在码头问题是图10所示的多个柱墩。桥墩两侧的桥梁跨度为25米。从网络预测负载轴承垫负载将位置与实际设计荷载进行比较。对于这个特别的例子,我们寻求找到最大的墩柱组合。如图10所示,网络预测的负载产生最大的力量组合是不同的设计荷载。网络预测的外部车道应该是装在桥墩上产生最大合力的组合柱。对于实际设计荷载,相同的梁反应是应用以每个轴承垫随着假设所有三个车道被装载。在这特殊情况下,列的时刻是可以忽略不
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[150028],资料为PDF文档或Word文档,PDF文档可免费转换为Word
您可能感兴趣的文章
- 饮用水微生物群:一个全面的时空研究,以监测巴黎供水系统的水质外文翻译资料
- 步进电机控制和摩擦模型对复杂机械系统精确定位的影响外文翻译资料
- 具有温湿度控制的开式阴极PEM燃料电池性能的提升外文翻译资料
- 警报定时系统对驾驶员行为的影响:调查驾驶员信任的差异以及根据警报定时对警报的响应外文翻译资料
- 门禁系统的零知识认证解决方案外文翻译资料
- 车辆废气及室外环境中悬浮微粒中有机磷的含量—-个案研究外文翻译资料
- ZigBee协议对城市风力涡轮机的无线监控: 支持应用软件和传感器模块外文翻译资料
- ZigBee系统在医疗保健中提供位置信息和传感器数据传输的方案外文翻译资料
- 基于PLC的模糊控制器在污水处理系统中的应用外文翻译资料
- 光伏并联最大功率点跟踪系统独立应用程序外文翻译资料


