
英语原文共 10 页,剩余内容已隐藏,支付完成后下载完整资料
十二杆的三自由度莱佩莱捷式齿轮机构的十速自动变速器结构设计
Essam L. Esmail
伊拉克,迪瓦尼耶,卡迪西亚大学工学院
原稿接收于2014年9月2日;修改于2015年5月8日;收录于2015年9月22日
摘要:
许多莱佩莱捷式自动变速器都在生产。有些莱佩莱捷式自动变速器的相关配置还远远没有达到最大可能的连续传动比。这项研究工作聚焦于分析和发展十二杆三自由度莱佩莱捷式自动变速器以达到最大传动比。从总体趋势来看,随着传动比范围的扩大和挡位数增加,新的十速自动变速器将从十二杆三自由度莱佩莱捷式齿轮机构中列举。此外,十速自动变速器是对现有八速莱佩莱捷式自动变速器的改进。结果表明,十二杆三自由度莱佩莱捷式齿轮机构最多可以达到十一个前进挡位。诺模图显示在检测可行的结构及其离合序列方面是可行的。
关键词:自动变速器,离合序列,十一速,行星轮系,齿轮传动比,莱佩莱捷式,诺模图,十速,传动比
1.简介
带有行星齿轮机构的自动变速器已在汽车行业中使用了很长一段时间。著名公司已经提出了几种多速自动变速器。然而,他们总是把发展自动变速器当做商业机密。由于研究和开发文件大多是机密的,因此只能从专利文件,商业目录和非学术杂志中获取信息。行星齿轮系的文献包括动力学分析[1-5]、动态分析[6]、功率流和效率分析[7-9],概念和结构设计[10-21]。
在1992年,莱佩莱捷提出了三自由度行星齿轮机构,现在叫做莱佩莱捷式齿轮机构。在2001年,采埃孚使用这种齿轮组在市场上设计出第一款六速乘用车变速器6HP26[23]。
在过去几年中,离合序列的列举是一些学术研究的主题,最佳离合序列的选择仍不能求解。Nadel等人[24-26]制定了一个任务作为约束补偿问题;Hsieh和Tsai [13,15]、Hwang和Huang[16]以及Hsu和Huang [17,18]使用算法技术;Ross和Route [10]以及Esmail [19] 介绍图形学技术;Hattori等人[27]使用相位几何法;Refs[10,16,26-28]只限于特定类型的自动变速器离合序列构建。
Hsieh和Tsai[15]使用由Chatterjee和Tsai[12]在他们早起的运动学研究中[2]提出与自动变速器相关的最有效的离合序列[15]中的基本传动装置(FGEs)概念。Hsieh[14]提出了一种离合序列枚举的计算机算法,然而,Hsieh和Tsai[15]并没有开发出一种有效的布置离合序列的方法,但是,无效离合序列的枚举法经检验被实施。
基于诺模图,Esmail[19]提出了一种行星齿轮机构离合序列的枚举方法,。这种方法有效地简化了一个行星齿轮机构的离合序列的综合。
图2.双排行星简化齿轮传动机构
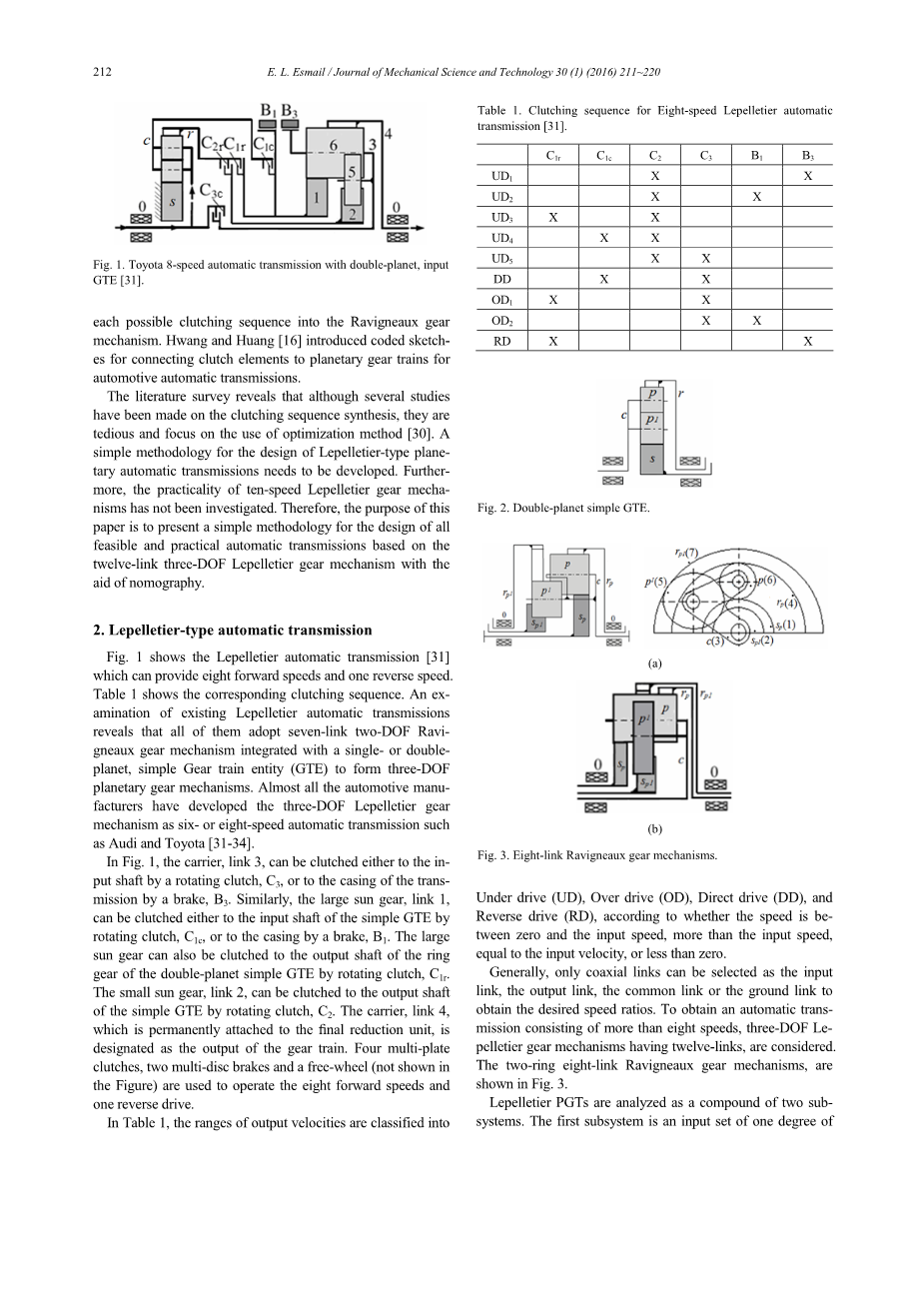
图1.丰田双排行星齿轮8速自动变速器,齿轮传动机构输入[31]
Hsu和Huang[18]通过由Hsu[29]提出的分配三个挡位(七速)所需传动比的分析方法综合了六速拉维娜式自动变速器的所有齿轮的齿数。当应用于拉维娜式六速自动变速器时,Hsu提出的方法成为一种试验的错误方法:达到令人满意的方法是通过尝试某一所需传动比直到满足其他传动比和设计约束为止,但是其冗长而乏味。他们还绘制出一个平面图表示把每个可行的离合序列所需的离合器布置到拉维娜式齿轮机构中。Huang和Hwang[16]介绍了用于汽车自动变速器的行星齿轮传动离合器元件的编码草图。
文献的调查显示,虽然一些研究已经取得了离合序列的综合,但是他们的方法繁琐且需要专注于优化方法的使用[30]。设计莱佩莱捷式行星齿轮自动变速器需要开发一种简单的方法,此外,十速莱佩莱捷式齿轮结构的实用性仍未研究,因此,本文的目的是基于十二杆三自由度莱佩莱捷式齿轮机构和诺模图的帮助,介绍一种设计所有切实可行的自动变速器的简单方法。
2.莱佩莱捷式自动变速器
图1所示的莱佩莱捷式自动变速器有8个前进挡和一个倒挡,表1为相应的离合序列。对现有的莱佩莱捷式自动变速器检测表明:它们都采用七杆二自由度的拉维娜式齿轮结构,该结构综合了单排或双排行星齿轮与简化齿轮传动机构(GTE),形成了三自由度行星齿轮机构,几乎所有的汽车制造商都已经开发了三自由度的莱佩莱捷式齿轮机构作为六速或八速自动变速器,比如奥迪和丰田。
在图1中,内齿圈3可以通过旋转离合器C3接合到输入轴上,也可以通过制动器B3接合到变速器壳体上。同样的,大太阳轮1可以通过旋转离合器C1c接合到简化齿轮传动机构输入轴上,也可以通过制动器B1接合到变速器壳体上。大太阳轮也可以通过旋转离合器C1r接合到双排行星简化齿轮传动机构的齿圈输出轴上。小太阳轮2可以通过旋转离合器C2接合到简化齿轮传动机构的输出轴上,恒定连接到最后减速单元的内齿圈4作为轮系的输出。四个多片式离合器、两个多盘式制动器和一个飞轮(图中未示出)被用来操纵8个前进挡和1个倒挡。
在表1中,输出速度的范围分为低速驱动(UD),超速驱动(OD),直接驱动(DD)和反向驱动(RD),根据速度是否在零与输入速度之间分为:超过输入速度、等于输入速度或小于零。
表1.八速莱佩莱捷式自动变速器离合序列
一般的,只有同轴部件才可以被选择作为输入部件、输出部件、公共部件或是固定部件以获得所需的传动比。为了获得八速以上的自动变速器,可以考虑十二杆三自由度莱佩莱捷式齿轮机构。图3所示为双内齿圈八杆拉维娜式齿轮机构。
(a)
(b)
图3.八杆拉维娜式齿轮机构
莱佩莱捷式行星齿轮传动机构(PGTs)可以分为两个子系统分析。第一个子系统是有一个自由度的输入端,这一个自由度由单排或双排行星简化齿轮传动机构提供的两个角速度而确定。第二个子系统是由由拉维娜式简化齿轮传动机构给定的两个自由度的输出端[35-38]。如图2,简化齿轮传动机构是由一个太阳轮、一个内齿圈、行星齿轮和行星架组成。图3所示为八杆两自由度拉维娜式齿轮机构,该机构由齿轮箱壳体(0)、太阳轮sp(1)、太阳轮sp1(2)、行星架c(3)、内齿圈rp(4)、行星齿轮p1(5)、行星齿轮p(6)和内齿圈rp1(7)组成。
基于以前的研究工作[21,38],本研究工作主要集中于十二杆三自由度莱佩莱捷式齿轮机构的十速自动变速器。
本文的目标是:
- 确定莱佩莱捷式齿轮机构的传动比特性,从而简化它们的运动特性。
- 开发和分析十二杆三自由度莱佩莱捷式齿轮机构。
- 提出一种对所有切实可行的基于十二杆三自由度莱佩莱捷式齿轮机构的自动变速器有效的枚举方法。
- 枚举新的来源于十二杆三自由度莱佩莱捷式齿轮机构的自动变速器。
- 改进现有的八速莱佩莱捷式自动变速器以增加两个或更多的前进挡。
- 枚举一种新的源自于十二杆三自由度莱佩莱捷式齿轮机构的十一速莱佩莱捷式自动变速器。
在不知道齿轮的精确尺寸时,诺模图在检测可行的机构和离合序列方面是实际可用的。
3.运动学诺模图的综合
运动学设计和离合序列的布置是变速器设计的两个最重要的因素。由于莱佩莱捷式齿轮机构可以分成简化齿轮传动机构和拉维娜式齿轮机构,因此莱佩莱捷式齿轮机构的运动学与其单独的齿轮机构有密切联系。因为一个齿轮结构体是由几个内齿圈、太阳轮、行星齿轮和行星架组成,所以在不知道每个齿轮的精确尺寸的条件下,估算出传动比是有可能的。
“齿轮齿数比”(Npx)是用来表示一个啮合齿轮副的传动比,而“传动比”用来表示一个行星齿轮机构(EGM)的输入部件与输出部件的速度比。设p和x为齿轮副齿轮,c为行星架,然后将p、x、c组合形成齿轮副。齿轮副方程可以写成:
(1)
其中omega;p,omega;x和omega;c分别表示齿轮副齿轮p、x,行星架c的速度,Npx表示行星齿轮p和x的传动比,Zp和Zx分别表示齿轮p和x的齿数,外啮合齿轮副使用加号,内啮合齿轮副用减号。
诺模图是包含了多个数值刻度的图形,每种刻度对应于不同的变量,这样相交直线就可以使相关的值被读取。行星齿轮系有两个自由度,这就意味着两自由度元素的旋转需要被指定以完全明确齿轮系统的运动。
如图3所示,双排行星齿轮拉维娜式齿轮系的运动学诺模图将被构建。
对于双排星型齿轮传动机构的部件,等式(1)可以改写为如下等式:
(2)
(3)
(4)
(5)
(6)
(7)
(8)
在双排行星齿轮传动机构中,没有直接啮合在行星齿轮上的传动装置的行星齿轮齿数比可以计算(p),根据双排行星齿轮的行星齿轮(Np,p1)齿数比可以得到啮合到另一个行星齿轮上传动装置的行星齿轮齿数比(p1)
(9)
(10)
图4所示的是创建出的基础诺模图,纵轴omega;rp、omega;rp1、omega;sp、omega;sp1、omega;p、omega;p1和omega;c分别代表内齿圈rp、内齿圈rp1、太阳轮sp、太阳轮sp1、行星齿轮p、行星齿轮p1、和行星架c的转速,omega;c轴放置在原点。omega;c轴和omega;p轴之间的距离令其等于1,内齿圈rp总是比行星齿轮大,因此Np,r的值总是大于零小于1。omega;r轴的位置实际上在omega;c轴和omega;p轴之间,并且omega;c轴和omega;r轴之间的距离令其等于Np,r。由于第一个行星齿轮齿数比到第二个行星齿轮齿数比的值总是小于零,所以,omega;p1轴的位置实际上在omega;c轴的左侧,其距离为omega;c轴和omega;p1轴之间的距离令其等于Np,p1。由于Np,sp总是小于零,omega;sp轴的位置实际上在omega;c轴的左侧,其距离为omega;c轴和omega;sp轴之间的距离,令其等于Ns,sp。
图5.图2所示的双排行星齿轮传动机构诺模图
内齿圈rp总是比太阳轮sp1大,Zrpgt;Zsp1和(1/Zrp)lt;(1/Zsp1),所以(Zp/Zrp)lt;(Zp/Zsp1)或Np,rplt;Np,sp1,这意味着Np,rp的值总是小于Np,sp1。omega;sp1轴的位置实际上在omega;rp轴的右边,其距离为omega;c轴与omega;sp1轴之间的之间的距离,令其等于Ns,sp1。内齿圈rp1总是大于太阳轮sp, Zrp1gt;Zsp和(1/Zrp1)lt;(1/Zsp),所以,(Zp/Zrp1)lt;(Zp/Zsp)和(-Zp/Zr
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[152140],资料为PDF文档或Word文档,PDF文档可免费转换为Word
您可能感兴趣的文章
- 饮用水微生物群:一个全面的时空研究,以监测巴黎供水系统的水质外文翻译资料
- 步进电机控制和摩擦模型对复杂机械系统精确定位的影响外文翻译资料
- 具有温湿度控制的开式阴极PEM燃料电池性能的提升外文翻译资料
- 警报定时系统对驾驶员行为的影响:调查驾驶员信任的差异以及根据警报定时对警报的响应外文翻译资料
- 门禁系统的零知识认证解决方案外文翻译资料
- 车辆废气及室外环境中悬浮微粒中有机磷的含量—-个案研究外文翻译资料
- ZigBee协议对城市风力涡轮机的无线监控: 支持应用软件和传感器模块外文翻译资料
- ZigBee系统在医疗保健中提供位置信息和传感器数据传输的方案外文翻译资料
- 基于PLC的模糊控制器在污水处理系统中的应用外文翻译资料
- 光伏并联最大功率点跟踪系统独立应用程序外文翻译资料


