
英语原文共 27 页,剩余内容已隐藏,支付完成后下载完整资料
半主动悬架系统的MR阻尼器的自适应仿真和控制
- 引言
作为半主动控制装置中广泛使用的,电流变(ER)和磁流变(MR)流体已被公认为特定的智能材料,因为它们的流变特性可以通过调谐电场或磁场在毫秒内改变。在车辆悬架应用中,流体的诱导应力应足够大以消除所施加的力。与ER流体相比,MR流体可产生50-100kPa的应力,具有良好的可控性和小功耗。因此,MR流体和相关联的MR阻尼器已经用于振动控制中,例如:桥梁结构、建筑和车辆悬挂系统。
设计车辆悬挂系统用于提高车辆的机动性、乘坐舒适性和安全性。通常,悬架系统可以分为三种类型:被动悬架,半主动悬架和主动悬架。与主动悬架相比,由于其低成本,低能耗和高可靠性,半主动悬架已经吸引了学术界和工程师的极大关注。注意,具有MR阻尼器的悬挂系统可以被视为半主动悬挂装置,因为阻尼力可以通过使用可变阻尼或能量耗散部件来改变。然而,由于在MR阻尼器中引起的滞后动力学,具有MR阻尼器的半主动悬架的控制尚未完全解决。
为了准确描述MR阻尼器的动力学,已经提出了若干数学模型来捕获滞后和双粘特性,例如Bingham模型、Bouc-wen模型和Spencer模型等。然而,在上述模型中,MR阻尼器的复杂性和精度之间的冲突总是显著的;例如,采用复杂的MR阻尼器模型来全面描述其动力特性可能使参数识别困难。因此,当在实际系统中使用具有MR阻尼器的半主动悬架时,应当仔细地解决这些相冲突的要求之间的权衡。
事实上,MR阻尼器在车辆悬架系统中的应用已经在一些文献中报道。根据磁流变技术,可以通过改变输入电流来实现阻尼力的调节。这又可以消除车辆振动,从而提高乘坐舒适性和操作稳定性。设计了具有LPV / H的半主动悬浮液控制方法。在文献中一个自适应控制方法被设计来管理复杂的迟滞非线性。然而,使用MR阻尼器的悬架系统的准确在线建模值得进一步研究。
在本文中,我们将MR阻尼器并入半主动悬架系统,并提出一种替代的建模和控制方法。首先,回顾了几种广泛使用的MR阻尼器模型,并且采用取决于滞后变量和阻尼器力的双曲线MR阻尼器模型。受我们最近工作的启发,我们提出了一种自适应参数估计方法,以在线识别未知模型参数。此外,对具有未知双曲线MR阻尼器的半主动车辆悬架系统引入自适应控制。该控制可以通过操纵所施加的电流来调节车辆垂直位移。为了实现同时在线建模和控制,如在自适应法中引入的新的泄漏项,使得估计的参数收敛到它们的真实值。在这种情况下,控制系统的性能可以大大提高。还研究了悬架性能要求。最后,给出模拟结果来说明所提出的方法的功效。
- 磁流变减振器的模型
2.1MR阻尼器动力学
磁流变流体由铁磁颗粒,基础液体和稳定剂组成。在零磁场条件下,MR流体可以呈现低粘度牛顿流体状态。然而,随着磁场强度的增加,液体转变成具有高粘度和低流动性的宾汉液体。这种转换是连续的和可逆的,这可以在毫秒时间发生,因此MR流体可以作为一种可控流体[13]。该突出特征使得可以使用MR流体作为用于构造作为半主动控制装置的MR阻尼器的工作介质。这种MR阻尼器具有结构简单,响应快,功耗低,连续可调,阻尼力高的优点。
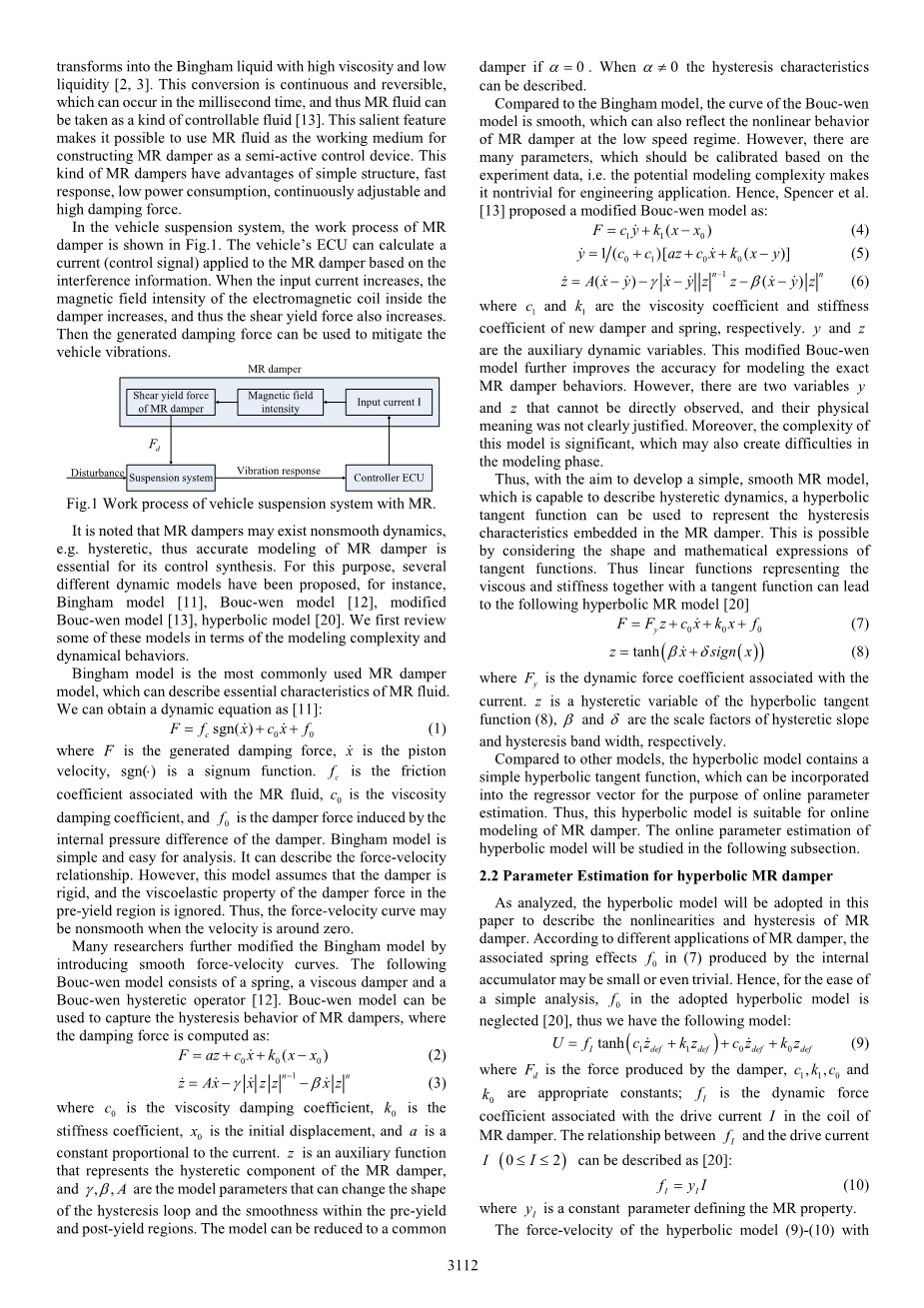
在车辆悬架系统中,MR阻尼器的工作过程如图1所示。车辆ECU可以基于干扰信息计算施加到MR阻尼器的电流(控制信号)。当输入电流增加时,阻尼器内部的电磁线圈的磁场强度增加,因此剪切屈服力也增加。然后,所产生的阻尼力可以用于减轻车辆振动。
注意,MR阻尼器可能存在非平滑动力学,例如。滞后,因此MR阻尼器的精确建模对于其控制合成是必要的。为此,提出了几种不同的动态模型,例如Bingham模型[11],Bouc-wen模型[12],改进的Bouc-wen模型[13],双曲线模型[20]。我们首先在建模复杂性和动态行为方面回顾一些这些模型。
Bingham模型是最常用的MR阻尼器模型,它可以描述MR流体的基本特性我们可以得到一个动态方程[11]:
其中F是所产生的阻尼力,是活塞速度,sgn()是符号函数。是与MR流体相关的摩擦系数,是粘性阻尼系数,是由阻尼器的内部压力差引起的阻尼力。宾汉模型简单并且容易分析。 它可以描述力-速度关系。 然而,该模型假设阻尼器是刚性的,并且在产前区域中的阻尼力的粘弹性性质被忽略。 因此,当速度接近零时,力-速度曲线可以是非光滑的。
许多研究人员通过引入平滑的力 - 速度曲线进一步修改宾汉模型。以下Bouc-wen模型包括弹簧,粘性阻尼器和Bouc-wen滞后算子[12]。 Bouc-wen模型可用于捕获MR阻尼器的滞后行为,其中阻尼力计算为:
-gamma;∣∣-beta;
其中是粘性阻尼系数,是刚度系数,是初始位移,a是与电流成比例的常数。 z是表示MR阻尼器的滞后分量的辅助函数,gamma;,beta;,A是可以改变滞后环的形状和产前和产后区域内的平滑性的模型参数。如果alpha;= 0,则可以将模型简化为共同的阻尼器。当alpha;ne;0时,可以描述滞后特性。
与Bingham模型相比,Bouc-wen模型的曲线是平滑的,这也可以反映MR阻尼器在低速状态下的非线性行为。然而,存在许多参数,其应当基于实验数据来校准,即潜在的建模复杂性使得其对于工程应用来说是不重要的。因此,Spencer等人[13]提出了一个改进的Bouc-wen模型:
gamma;∣∣z-beta;().
其中和分别是新阻尼器和弹簧的粘度系数和刚度系数。 y和z是辅助动态变量。这个改进的Bouc-wen模型进一步提高了精确模型的精度MR阻尼器性能。然而,有两个变量y和z不能被观察到,并且它们的物理意义没有明确证明。此外,这种模型的复杂性是重要的,这也可能产生困难建模阶段。
2.2双曲线MR阻尼器的参数仿真
经分析,本文将采用双曲线模型来描述MR阻尼器的非线性和滞后。 根据MR阻尼器的不同应用,由内部蓄能器产生的(7)中的相关弹簧效应f0可以小或甚至微不足道。 因此,为了简化分析,所采用的双曲线模型中的f0被忽略[20],因此我们有以下模型:
tanh()
其中fd是阻尼器产生的力,c1,k1,c0和k0是适当的常数; 是与MR阻尼器的线圈中的驱动电流I相关联的动态力系数。 关和驱动电流I(0le;Ile;2}之间的关系可以描述为[20]:
其中是限定MR性质的常数参数。
具有不同驱动电流的双曲线模型(9)-(10)的力-速度示于图2中。可以发现磁滞回线被清楚地指示。因此,双曲线模型可用于准确描述MR阻尼器的滞后特性。
在[20]中,使用类似的双曲线模型来表征MR阻尼器的性质。 然而,参数y,co,ko都假定为精确已知的。 在本文中,我们将开发一个在线自适应框架来估计为了简化,包括在正切函数中的常数c1,k1是已知的。 此外,在该部分中,MR阻尼器力fd和活塞速度和位移都是可访问的或可测量的。
为了使用阻尼力fd,活塞速度和位移来估计(11)中的theta;,我们将采用和修改我们在[18,19]中提出的先前方法,以引入具有指数误差收敛的系统(11) 。 因此,根据以下等式定义辅助矩阵M和矢量N:
-
自适应仿真与控制
- 1/4二自由度汽车模型
在本文中,研究了图3所示的非线性四分车模型,其中是悬挂质量,分别表示车轮的质量。 fd和fs是阻尼器和弹簧产生的力,阻尼系数为线性和非线性项ks,ksu的加强系数。Ft和fb表示具有刚度和阻尼系数的轮胎的弹性和阻尼力kt,bf,zs和zms是弹簧和非簧载质量的位移。 Zr是道路位移的输入。 U是半主动悬架系统的控制力,其由双曲线模型(11)生成。
- 仿真
在本节中,提供了数值模拟来说明所提出的算法的有效性。 MR阻尼器和四分之一车模型的参数给出为:= 600kg,= 60kg,=18000N / m,=1000N / m,= 200000N / m,= 1000Ns / m,= 2500Ns / m,=2200Ns / m,=810.78Ns / m,
= 13.76s / m,= 457.04N / /m,,=620.79N/m, =0.15m。模拟以下两种情况:
情况1(MR阻尼器的自适应参数估计):在该模拟中,仅考虑MR阻尼器动力学(11)以示出在线建模方法(14)。因此,我们将活塞的速度设定为=0.6cos(6t),输入电流为I= 2。比较梯度法和所提出的方法的估计性能。为了公平比较,将初始模拟条件设置为B(0)= [0000011] T。模拟参数设置为I= 30diag [0.065 0.53 6.4]并且k=0.001,L=1.从图4中,具有估计参数的速度 - 力曲线与其标称对应物相当。清楚地示出,通过(14)的估计模型可以捕获现实MR阻尼器的基本动力学。这意味着估计参数收敛到它们的真实值。因此,所提出的新的泄漏项有助于改善参数估计性能。
其中b = 0.1m,L = 5m是隆起道路轮廓的高度和长度,v_s = 45km / h是车辆速度。将所提出的半主动悬架方法(26)和(31)的悬架性能与初始值X1(0)一0.01m,Xi(0)= 0时的被动悬架系统(即I = i = 2,3,4,O(0)一[0 0 0 0 0 0.5]^ T
- 结论
在本文中,提出了一种用于具有磁流变(MR)阻尼器的车辆半主动悬挂系统的自适应估计和控制。 通过使用最近引入的基于估计误差的自适应算法来估计简单MR阻尼器模型的未知参数。 在这个意义上,可以获得MR阻尼器的在线数学建模,其中仅使用可测量的滞后变量和阻尼力。此外,MR阻尼器进一步结合到车辆悬架系统中,并且开发了自适应控制以调节车体的垂直位移。 可以通过在自适应定律中引入估计误差的泄漏项来实现同时悬挂和参数估计。 还研究了乘坐舒适性和车辆安全性的悬架要求。 所提出的方法通过基于四分之一汽车模型的比较模拟来验证。
基于磁流变阻尼器的半车车辆模型的半主动悬架最优预览控制响应
- 引言
车辆悬架系统可以大致分为被动,主动和半主动悬架系统。在被动悬架系统中,刚度和阻尼参数是固定的,并在一定范围内为有效频率。为了克服这个问题,使用具有适应的能力的主动悬挂系统通过使用致动器改变道路条件已被Karnopp [1] ,Hedrick [2] 考虑研究过,Goodall和Kortum[3]讨论了车辆主动悬架设计的理论和实践方面。不同的最优控制,如线性二次调节器(LQR)[4],线性二次高斯(LQG)控制[5],模糊控制[6],神经网络方法已被用于主动悬架领域。
主动悬架系统的性能可以通过了解关于道路的未来信息来改进输入,其被称为“预览控制”。 Bender [7]提出了一种具有预览控制的主动悬架系统使用维纳滤波器技术找到单自由度(dof)车辆模型的最优控制律。主动悬挂系统的预览控制也适用于四分之一车[8]和半车[9,10]车型的具有预览控制的悬架的性能被显示为比没有预览的悬架的性能更好。
主动悬架系统增加的成本,复杂性,对外部能源的需求和控制硬件实现的困难导致半主动悬挂系统的发展,其结合了被动悬架和主动悬架系统的优点。半主动悬架系统也已被很多作者应用于车辆振动控制中。半主动悬挂系统与预览控制也分别研究了Hac和Youn的四分之一汽车二自由度和二分之一四自由度车辆模型[17,18]。结果表明,具有预览控制的半主动悬架系统的性能优于没有预览控制的半主动悬架系统。
最近,电流变(ER)和磁流变(MR)流体,其应用于显著地改变它们的粘度以得到合适的电场和磁场,也已被许多研究人员用于半主动悬架系统[19-21]。他们考虑了不同的控制,如天棚控制,地棚控制和混合控制与最小或最大输入电流MR阻尼器取决于簧上质量和非簧载质量之间的相对速度。到MR的输入电流阻尼器也可以根据不同的最优控制策略,如LQR,LQG与卡尔曼滤波器,神经网络和H1控制[22,23]。在上述工作中,道路激励被认为是确定性或随机过程。当道路激励被视为随机过程时,它被数值模拟。使用的加权因子控制器设计也任意选择。
在本文中,考虑了基于最优控制的MR阻尼器的半主动悬架模型对于随机路面的稳态响应。这种MR阻尼器的性能被认为与具有和不具有预测的控制的相应控制力的均方根等效意义的主动悬架的性能相当。这种方法是全新的,它使半主动悬架的性能几乎提高到了基于控制的有限反馈的主动悬架的水平。 MR阻尼器性能由修正的Bouc-Wen模型建模。在研究中使用的模型的MR阻尼器参数对应于使用本征开发的MR流体的在房子中制造的实际阻尼器[24]。通过以0.5A的间隔将输入电流从0变化到1.5A,对制造的MR阻尼器进行实验。确定模型参数,使得模型特性非常接近MR阻尼器的实验滞回行为。多目标非支配排序遗传算法II(NSGAII)技术[25]用于优化修正的Bouc-Wen模型参数。它是通过最小化平均值获得的对于最小(0A)和最大(1.5A)输入电流,模型和实验结果之间的平方误差。使用等效线性化技术以迭代方式获得具有MR阻尼器的车辆模型对随机道路激励的响应统计,使得可以应用随机线性最优控制理论来控制车辆振动。如前所述,本文的目的是通过非线性MR阻尼器产生控制力,该控制力是与使用控制获得的控制力相等的均方根,使得MR阻尼器的半主动控制执行几乎与基于使用控制的有限状态反馈的最优主动控制半主动MR阻尼器的主动悬架的性能匹配,即半控制的响应。等效线性化方法的结果通过蒙特卡罗模拟验证。因为获得了使用具有和不具有预览的控制的汽车车辆模型的目的。在控制中,使作为诸如均方根弹簧质量加速度,俯仰,前悬架和后悬架冲程,道路保持和控制力等的车辆响应测量的加权和的性能指标最小化。权重对应于车辆响应通过使用NSGA II算法求解多目标优化问题,使得所有的响应度量在性能指标中给予足够的重要性,也获得性能指标中的度量。半主动MR阻尼器悬架与
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[137356],资料为PDF文档或Word文档,PDF文档可免费转换为Word
您可能感兴趣的文章
- 饮用水微生物群:一个全面的时空研究,以监测巴黎供水系统的水质外文翻译资料
- 步进电机控制和摩擦模型对复杂机械系统精确定位的影响外文翻译资料
- 具有温湿度控制的开式阴极PEM燃料电池性能的提升外文翻译资料
- 警报定时系统对驾驶员行为的影响:调查驾驶员信任的差异以及根据警报定时对警报的响应外文翻译资料
- 门禁系统的零知识认证解决方案外文翻译资料
- 车辆废气及室外环境中悬浮微粒中有机磷的含量—-个案研究外文翻译资料
- ZigBee协议对城市风力涡轮机的无线监控: 支持应用软件和传感器模块外文翻译资料
- ZigBee系统在医疗保健中提供位置信息和传感器数据传输的方案外文翻译资料
- 基于PLC的模糊控制器在污水处理系统中的应用外文翻译资料
- 光伏并联最大功率点跟踪系统独立应用程序外文翻译资料


