
英语原文共 12 页,剩余内容已隐藏,支付完成后下载完整资料
基于纯电动汽车持续能量再生防抱死制动系统的
实验性科学研究
汽车工程小组,机械工程部,伊尔默瑙工业大学,伊尔默瑙98693,德国
精密仪器和微系统工程部,代尔夫特理工大学,2628 CD代尔夫特,荷兰
摘要:带走独立控制驱动车轮的纯电动汽车的防抱死制动系统的功能可以通过传统制动系统的动摩擦制动器和能量再生制动系统的驱动电机中得出。为了分析两种防抱死制动系统的优点和缺点,本文介绍了从检验四轮驱动电动汽车的地面测试中获得的实验探究结果。制动器的表现从三个不同的构造进行分析:液压ABS,前轴再生ABS,前轴采用液压和再生混合ABS,后轴采用液压ABS 。液压ABS工作基于规则控制器,再生ABS使用的是带有前馈和反馈控制部分的增益比例积分直接滑动控制。在低摩擦道路表面上的测试结果证实了:有ABS的汽车比没有ABS的汽车,制动距离会有相当大的降低。此外,再生ABS的制动机动是以基准轮滑移的精确跟踪为特征的,这将导致车辆减速剖面的振动时间缩短,因此具有更好的驾驶舒适性。本文的实验探究结果可用于新一代单轮驱动纯电动汽车的ABS结构选择过程。
关键词:防抱死制动系统,电动汽车,连续防抱死制动系统,基于规则的防抱死制动系统
1.简介
单轮转矩控制的电机驱动装置作为最有前景的电动汽车结构变形得到了越来越多的认可。这种电机驱动装置和车轮的联系主要以三种不同的结构实现:“车载汽车半轴齿轮(Bottiglione et al.,2012;Dhaens,2011),轮毂电机齿轮(Akaho et al.,2010),直轮电机驱动(Freitag et al.,2013)。”这一电动汽车结构展示了更有效的汽车动力控制领域的机遇,这一结论不仅通过相关调查研究被证实,也被相对应的批量生产汽车的操作实践证实。(Murata,2012)
考虑到横向动力学,以上讨论的电动汽车结构需要考虑足够的定向转矩和电子稳定控制(Kim and Kim,2007;Fujimotor et al.,2007;Konig et al.,2010)。在此情境中,特别的优点是有全轮驱动的电动汽车的基于电机的横摆力矩控制系统(De Novellis et al.,2014;Okayama et al.,2013)。从车辆纵向动力学的角度看,单独驱动车轮作为牵引控制系统执行机构有利于电动汽车的起步和加速。(Liu et al.,2005;Akiba et al.,2007;Geamanu et al.,2012)第二有前景的单独驱动车轮应用领域和制动动力学控制有关。在这种情况下,独立或混合操作的纯再生ABS驱动电机和传统的ABS驱动摩擦制动器是可以实现的。本次研究的目标是在这些特定情况下提出的。电动汽车结构中再生和传统的防抱死制动系统的整合的几个变种是已知的。特别的,作品(Freitag et al.,2012)介绍了这个概念,实现了带有西门子生产的轮毂电机的电动汽车的操纵,其中液压防抱死制动系统驱动前摩擦制动器,单独控制的轮毂电机负责防抱死制动系统的后轮制动。现代公司的研究员在一个以后轮鼓式摩擦制动器和轮毂电机共同操作为特征的部分相似的组合中描述到。其他一些调查的研究(Kim et al.,2010)还讨论了组合液压和再生ABS同时控制前轮和后轮。(Sakamoto et al.,2006;Song et al.,2011;Liu et al.,2013;Dadashnialehi et al.,2014)然而,关于全轮驱动电动汽车的组合ABS已知出版研究中主要都是基于模型和硬件的环仿真结果。以真实车辆为基础的相关的实验研究是很少见的。其他的主题,在研究文献中也简单的介绍过,对动力总成结构的特定变形的车轮打滑设计和常规与再生ABS性能的对比分析。
从实验的角度讨论所提到的问题,给定的工作就配备单独控制电机的全轮驱动电动汽车持续ABS的设计提出了一个特别的研究。本文的下一部分中介绍:电动汽车范例;液压再生防抱死制动系统的设计与控制方法;道路试验程序;实验结果及结论分析。
2.详述电动汽车
所提出的工作中使用的电动汽车范例是在越野车揽胜Evoque平台上设计的。安装的全轮驱动动力总成架构有单独的板上电机通过齿轮箱和半轴连接到车轮。车辆外形的几个视图如图1所示。车辆的主要技术数据如下:总重量2117公斤;四开关磁阻电机-峰值扭矩/功率(30秒):200牛·米/ 100千瓦,公称扭矩/功率:135牛·米/ 42千瓦,最大速度:15000米minus;1;电机传动-螺旋齿轮双级减速器的齿轮比:1:10.5,半轴的扭转刚度:6500 nm /弧度;轮胎235 / 55 R 19。
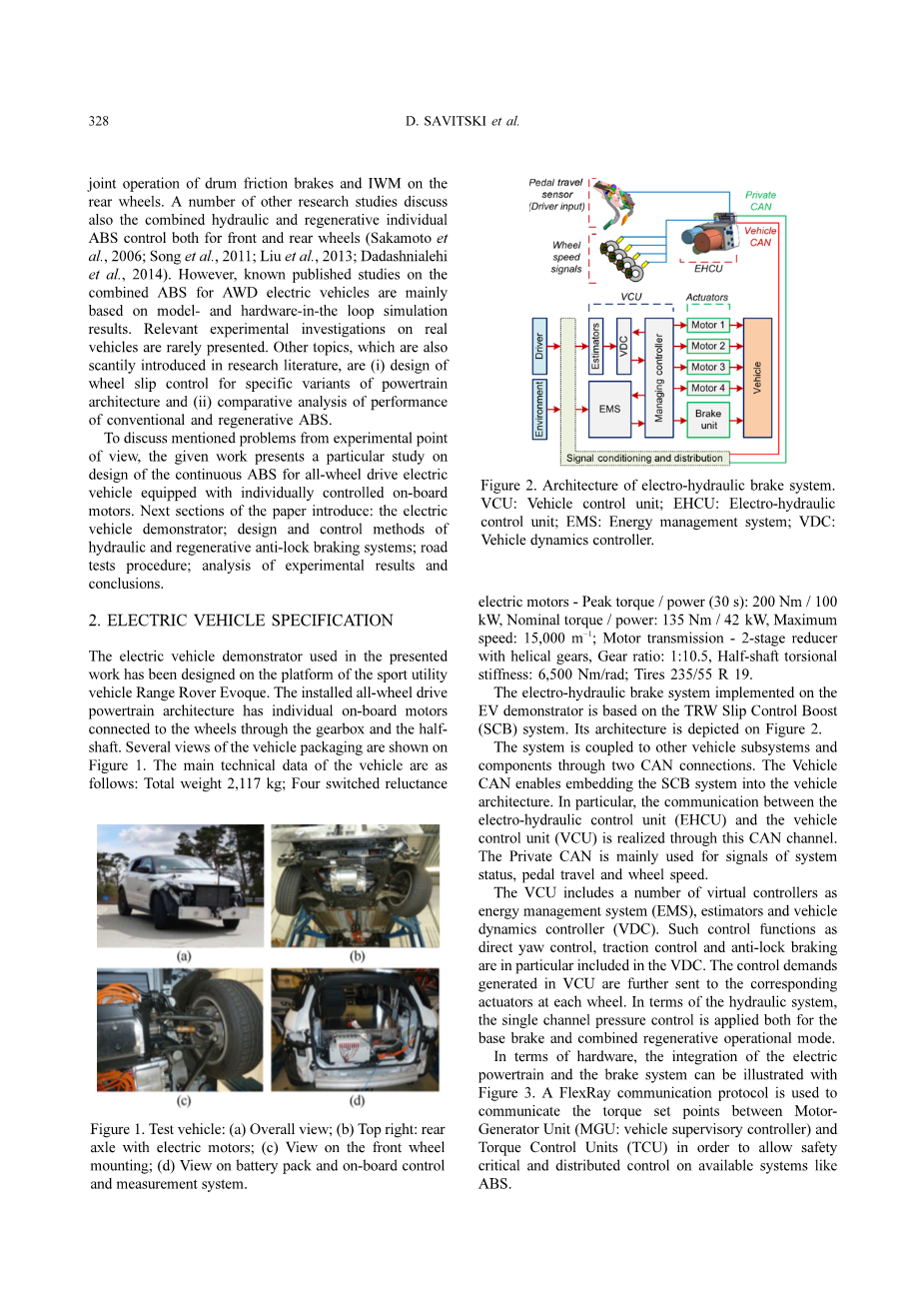
电液制动系统实现对电动车范例的控制是基于TRW的滑动控制加速(SCB)系统。它的结构如图2所示。该系统通过两个CAN连接耦合到其他车辆子系统和组件。CAN可以使SCB系统嵌入车辆结构。特别的是,电液控制单元(EHCU)和车辆控制单元(VCU)之间的通讯是通过CAN通道。内部的CAN主要用于系统状态、踏板行程和轮速信号。
车辆控制单元包含多个虚拟控制器作为能量管理系统(EMS),估计和车辆动态控制(VDC)。这些控制功能作为直接横摆控制,特别的,牵引力控制和防抱死制动包括在VDC中。VCU中产生的控制要求进一步发送到每个车轮相应的执行器中。在液压系统方面,单回路压力控制既适用于基础制动又适用于组合式再生操作模式。
在硬件方面,电气动力总成和制动系统的集成可以用图3说明。FlexRay通信协议是用来沟通电机发电机组(MGU:车辆监控控制器)和转矩控制单元(TCU)之间的转矩设置点的,为了获得像ABS这样安全和分布式控制的可操作系统。
3.ABS控制器
3.1电液制动系统的防抱死制动系统操作
SCB单元内部的ABS控制功能采用基于规则的车轮打滑控制,当车辆控制单元失效时会被激活。控制方法意味着三相压力调制:转储,申请和持有。由于选定的控制策略的实际轮胎路面摩擦峰值周围的滑动循环一定程度上通常可以观察到,特别是在个别车轮制动压力被估计但未被测量时。
在图4中,ABS操作由速度剖面的形式说明。参考速度和车轮速度几乎匹配的稳定状态在过度滑移被检测到的状态之后。制动压力减小车轮速度恢复之后,系统最终处于恢复状态。然后制动压力可以再次增加。只要车轮转速和参考速度之间发生重大偏差,这样的控制回路就以1赫兹到3赫兹的频率重复。确定显著偏差的主要标准是滑移检测阈值。
3.2 连续再生ABS控制器
在所提出的研究的框架内,在比较分析致力于传统和电动防抱死制动系统的组合操作和电动汽车的负转矩调制方法相关的研究和技术出版物后,ABS的控制结构被选定。(Ivanov et al.,2014a)在这个方面,一个适用于电动汽车不同的ABS的详细的基准还未被成功检测到行之有效的表达方式。在各种变形中,以基于规则的(Song et al.,2011;Mutoh,2012),滑模(Bera et al.,2012; De Castro et al.,2012)和模糊(Khatun et al.,2003;Jalali et al.,2012;Yin and Jin,2013)控制器提出的最多。考虑到电力传动系统的驱动动力,总体控制器结构和其他一些因素,决定考虑对电动汽车模型使用另一种ABS设计。
改进后的ABS,如图5,使用增益比例积分(PI)直接用前反馈和后反馈控制部分进行滑动控制,实现连续变量的控制驱动(区别于以规则为基础的控制)。控制器的简要说明如下。
制动踏板上的驱动力带来了ABS的初始化。集成在制动踏板单元里的传感器(见图2)测量制动踏板行程spedal。这一信息在基础制动控制器中用来计算来自电动汽车模型的查找表中的初始制动力矩Tdem_prim 。基础制动控制器计算同时预测了制动力矩,tpred,考虑到道路条件,
其中u 为最大摩擦系数估计值,F为估计正常车轮负荷,r为轮胎滚动半径,k为校正系数,最大摩擦系数估计值u和估计正常车轮负荷F都将用于通过查找表生成相关滑移系数lambda;。校正系数k对电动汽车模型的每根轴进行单独定义,要求避免制动不足情况。然后基础制动控制器根据下列规则实现最终制动转矩要求的饱和过程。
进一步的ABS程序由反应扭转控制器处理。反应扭转控制器公式如下:
其中vpi为比例积分控制要求,为校正系数。校正系数要求囊括所有反应转矩以此来追踪驾驶需求同时避免错误转矩的产生。控制需求v由PI控制器生成,
控制器的比例部分是车辆速度的函数
积分部分这样计算:
其中系数a为修饰系数,用来定义积分部分的变化率。
等式5和6中的变量e定义控制错误。控制错误的饱和度按以下方式受影响:
其中Ve是饱和度变量。变量Ve取0.02,在接下来部分要介绍的大多数测试中。
下一步,需求转矩Tdem 和反应转矩Treact 的产生由转矩限制和混合控制模块处理,如图6。为了电机得到最大程度的利用,要根据电机,转速和电池限制选择转矩范围。控制器获得最大可能的需求电动转矩Tdem ,作为每一步的输出然后分配其余的扭矩到摩擦制动器上。然后来自摩擦制动器的T和电机的制动力Tem_dem 通过每个车轮上相应的驱动装置得到单独的制动力分配。关于转矩限制和制动混合程序的附加说明在ivanov中给出。
关于真实车轮转矩Tw 车轮转速w和纵向加/减速度a会由带有作为反应转矩控制器输入的真实滑移lambda;和车速V的计算器处理。
因此,前反馈滑移控制部分和预测转矩需求的产生相关,Tpred,反应转矩控制器对后反馈的滑移控制部分负责,Treart 。连续ABS驱动由比例积分型的反应转矩控制器实现。
4.连续ABS控制器增益的定义
4.1方法论
连续ABS控制器的比例和积分增益和增益调度机制的选择已经考虑了噪声和车轮速度传感器信号的延迟。特别的是,车轮速度传感器数据通过CAN每3毫秒从SCB向VCU转换一次。车轮速度传感器信号的噪声被以30赫兹为截止频率的一阶滤波器处理掉了。对于车速,假设是在corsys-datron系统测量下,应用卡尔曼滤波器。(Doumiati et al.,2012)关于文章前面介绍的闭环PI滑移控制器的频域响应的进一步分析已经完整。为了达到这一目的,四分之一车模型被用于闭环配置。
在这种情况下,车辆和轮胎动力学可以用等式(8)和(9)分别描述:
其中m是车辆质量,r是车轮滚动半径,Fx是纵向力,已经在基于伯克哈特轮胎模型的分析中计算得到,作为轮胎滑移率lambda;和轮胎最大路面摩擦系数mu;的函数。
实际滑移可由等式(8)~(10)导出:
其中J是车轮转动惯量。
等式(11)被用来分析反馈车轮滑移控制器的变量是如何影响闭环系统的振动频率和阻尼比,图7。值得注意的是,延迟的产生是由于考虑了CAN交流(3毫秒)和一阶巴特沃斯滤波器(fc=30Hz)
电机瞬态动力学由延迟一阶传递函数表示。
考虑到转矩由电机完全实现,等式(12)中要求的转矩Tem_dem在忽略极限转矩和制动混合运算法则的情况下导出。
参考的车轮滑移lambda;ref产生的正弦扫描扫描信号的振幅为3%。控制误差计算为:
其中lambda;est是车轮滑移考虑系统延迟的估计值,该系统的频率响应表示lambda;ref作为输入和lambda;est 作为输出信号。
图8显示了一个从演示车辆的参数获得的频率响应实例,是一个最大摩擦系数为mu;max=0.1的摩擦滑移曲线具体的情况。
图8中的增益Kp和Ki分别从1e-5变化到1e4。图8中的箭头显示了相应增益的变化趋势。根据增益变化的系统阻尼行为分析允许在道路测试中实施最终的ABS 增益调整。
从图8中还可以看到,频率响应随车速和系统阻尼和带宽的变化而变化。因此,提高ABS的反馈控制质量,Kp和Ki增益是根据车辆速度制定的。
增益调度程序和其他一些具体的方面,如滑靶适应由于专利未决,在本文中不予考虑。补充说明也可以在本篇研究的作者的以往的作品(Ibanov et al.,,2014b)中找到。
4.2.连续ABS的功能验证
模拟和道路实验之间的一个重要步骤是ABS控制器的初步功能验证。这项任务已经完成,使用的是硬件循环(HIL)测试程序与dSPACE HIL设备。(Savitiki et al.,2013)
它包括了摩擦制动器和图2的制动系统的实际硬件组件,与IPG CarMaker车辆模拟器软件相连。虚拟子系统如电动机的动态在Matlab/Simulink环境中模拟,但不代表硬件元件和用于离线模式的应用也是。举个例子来解释,图9介绍的是在低摩擦路面上从68km/h开始制动的车辆自行车的HIL测试结果。
所提出的滤波器设计的效率可以用图9的(a)和(b)进行评估,其中噪声根据相应的实际数据corrsys DATRON和轮速传感器已被加入车速信号。结果表明应用在车速上的卡尔曼滤波器和车速信号上的截止频率为30Hz的一阶巴特沃斯滤波器有效的减少了车轮滑移的噪声和最小化了滞后时间。这样显著提高了车轮滑移计算的准确性(图9(c)),从图9(d)中可以看到允许实现基本上减少车轮速度和车速震荡的有针对性的持续ABS控制。总的来说,HIL测试证实,选择的控制器增益保证了所要求的ABS功能,也可用于示范车辆的进一步道路试验。
为了更确定电机在再生ABS模式下可以操作以及评价这种模式的效率,已经选定低路面摩擦系数表面在第五部分做进一步的实验调查。
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[138238],资料为PDF文档或Word文档,PDF文档可免费转换为Word
您可能感兴趣的文章
- 饮用水微生物群:一个全面的时空研究,以监测巴黎供水系统的水质外文翻译资料
- 步进电机控制和摩擦模型对复杂机械系统精确定位的影响外文翻译资料
- 具有温湿度控制的开式阴极PEM燃料电池性能的提升外文翻译资料
- 警报定时系统对驾驶员行为的影响:调查驾驶员信任的差异以及根据警报定时对警报的响应外文翻译资料
- 门禁系统的零知识认证解决方案外文翻译资料
- 车辆废气及室外环境中悬浮微粒中有机磷的含量—-个案研究外文翻译资料
- ZigBee协议对城市风力涡轮机的无线监控: 支持应用软件和传感器模块外文翻译资料
- ZigBee系统在医疗保健中提供位置信息和传感器数据传输的方案外文翻译资料
- 基于PLC的模糊控制器在污水处理系统中的应用外文翻译资料
- 光伏并联最大功率点跟踪系统独立应用程序外文翻译资料


