英语原文共 12 页,剩余内容已隐藏,支付完成后下载完整资料
使用基于S函数的PSO的光伏电网逆变器控制的模糊逻辑控制器的优化
L.K. Letting a,uArr;, J.L. Munda a, Y. Hamama,b
摘要 本文提出了粒子群优化(PSO)算法作为C-Mex S函数的实现。 该算法用于优化并网光伏(PV)逆变器中的最大功率点跟踪(MPPT)的9规则模糊逻辑控制器(FLC)。FLC为MPPT生成DC总线电压基准。 旋转dq参考系中的数字PI电流控制方案用于调节DC总线电压和无功功率。 所提出的技术简化了最优控制器设计,并确保快速模拟速度,由于与仿真平台的无缝集成。 提出的方法的有效性验证使用PSIM和MATLAB / Simulink中的共模拟。 仿真结果表明,与固定步长MPPT相比,优化的FLC提供了更好的性能。
关键词:S函数; 粒子群优化; 光伏阵列; 逆变器; 模糊逻辑控制器; MPPT
1引言
在农村地区,光伏(PV)发电是可靠且经济的电力来源,特别是在发展中国家,人们收入低,由于生存能力和财政限制,电网供电没有完全扩大。操作PV能量转换系统接近最大值功率点(MPP)来提高光伏系统效率是至关重要的。光伏阵列电流和功率与端子电压,太阳辐射和温度呈非线性变化。最大功率点跟踪器用于操作PV阵列在其最佳功率点。在并网光伏中逆变器的总谐波失真(THD)注入电流和无功功率也需要控制以满足电网要求。
由于并网光伏系统的非线性性质,在设计控制系统时使用反馈线性化和基于人工智能的方法。Lalili 等人(2011)提出具有可变步长MPPT的输入输出反馈线性化技术在。avi 等人(2011)提出了一种用于NPC多电平逆变器的具有49规则模糊MPPT的数字PI电流控制。Tsengenes和Adamidis(2011)提出了三级NPC光伏并网逆变器为电网提供辅助服务。 Skretas和Papadopoulos(2009)提出了一种混合风力发电系统,应用人工神经网络用于MPPT和逆变器输出电压调节。Mohamed等人提出了一种在分布式发电系统中使用PSO调节逆变器电压调节的可变结构控制器(2008)。
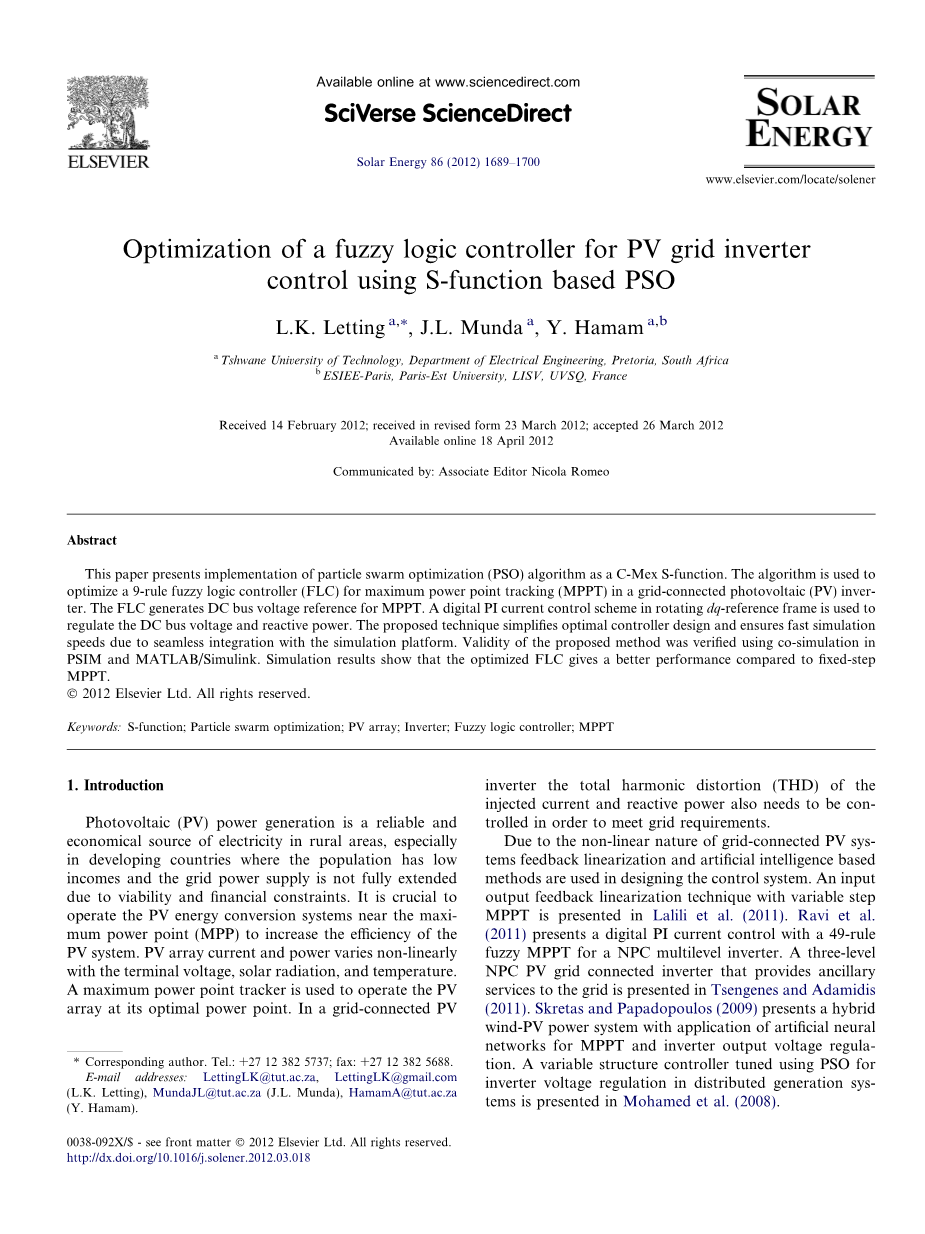
图1 并网光伏逆变器示意图
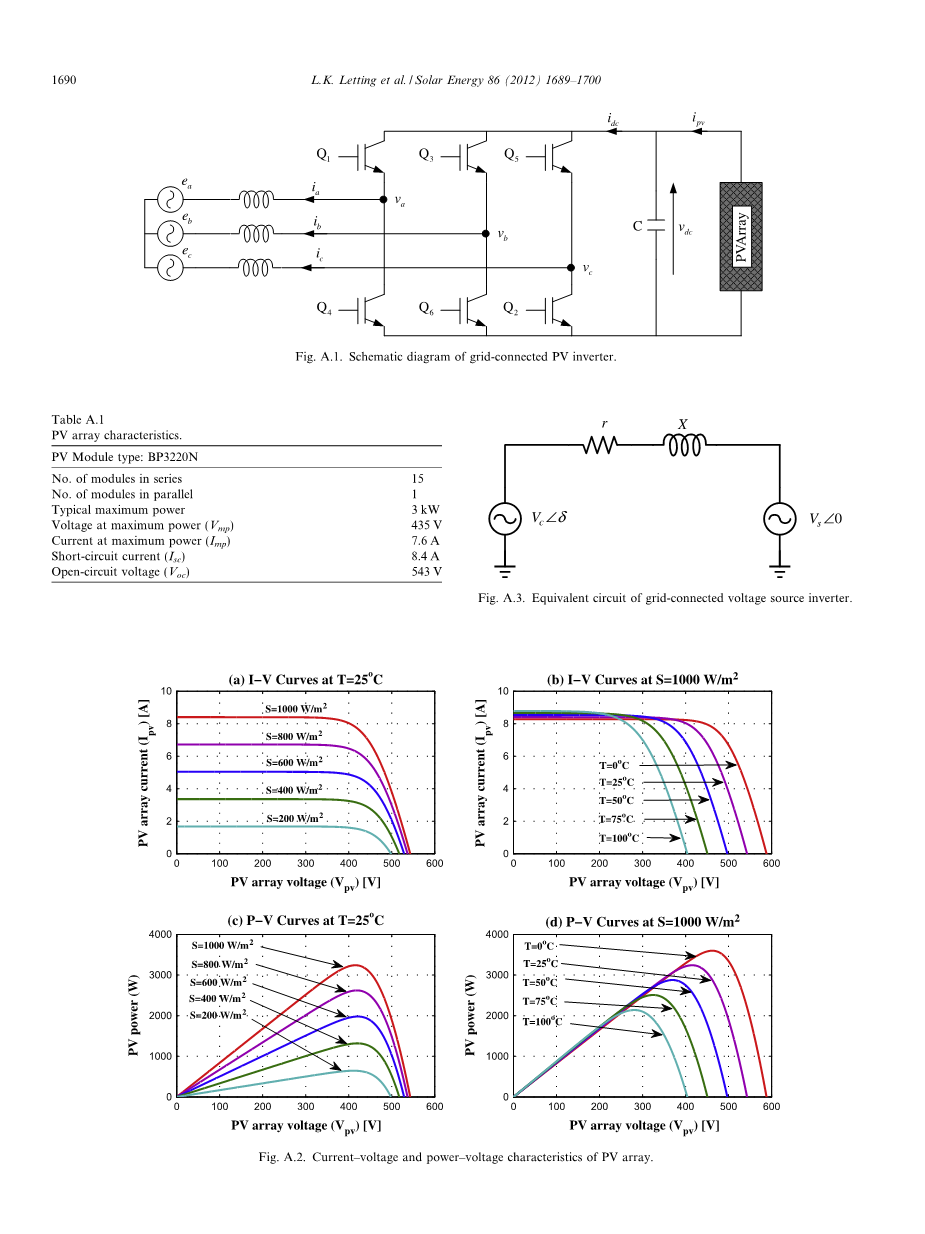
图2 光伏阵列的电流 - 电压和功率 - 电压特性
图3并网电压源逆变器的等效电路
表1 光伏阵列特性
|
PV模块类型:BP3220N |
|
系列中的模块数量 15 并行模块数量 1 典型最大功率 3 kW 最大功率时的电压(Vmp) 435 V 最大功率时的电流(Imp) 7.6 A 短路电流(Isc) 8.4 A 开路电压(Voc) 543 V |
图4 变频器控制系统框图
本文提出了一种新的技术,其中PSO算法被实现为C-Mex S函数,并用于调整模糊逻辑控制器。FLC用于跟踪最大功率,而PI电流控制器用于DC总线电压调节和无功功率控制。通过在PSIM中实现电源电路和在MATLAB / Simulink中实现控制电路来进行协同仿真。基于增量电导将优化的FLC的性能与固定步长MPPT方法进行比较。这项工作的新方法是:(1)将标准PSO算法简化为CMex S函数;(2)应用PSO算法来优化具有9规则的小规则库的模糊逻辑控制器; 和(3)在PSIM和MATLAB / Simulink中的系统模型的共模拟。
2系统描述
电源电路的结构如图1所示。它由光伏阵列,直流链电容器,三相两电平逆变器,电网滤波器电感和三相交流电源组成。 在1kW / m 2的太阳辐射和25℃的环境温度下,PV阵列可以产生3kW的最大功率。光伏阵列的规格如表1所示,电流—电压和功率— 电压特性如图2所示。
2.1 控制系统
连接到AC电网的电压源逆变器(VSI)的等效电路可以表示为如图3所示。(Diaz等人,2010)。 当忽略损耗和谐波时的有功功率(P)和无功功率(Q)由(1)和(2)给出(Zhang和Xu,2001)。 Vs和Vc分别是交流电网和逆变器输出电压的基波分量,X是逆变器电网滤波电抗。Vc滞后Vs角度d。逆变器输出电压的瞬时值由(3)给出,其中m是调制指数,Vdc是直流母线电压。 P和Q可以通过改变m和d来独立控制。
逆变器控制系统如图4所示。 模糊PI控制器产生参考直流电压,其确保从PV阵列提取最大功率。 直流总线PI控制器使用电压参考来生成d轴电流参考。q轴电流基准设置为零,以确保以单位功率因数运行。使用空间矢量脉宽调制(SVPWM)控制逆变器开关。 SVPWM是一种高效的PWM技术,可以很好地利用直流母线,并在三相VSI中产生较少的谐波失真(Buso和Mattavelli,2006; Rathnakumar 等人,2005)。
图5 Simulink中的模型执行。
图6 模糊PI控制器的结构。
图7 隶属函数的编码
表2 FLC规则库
表3 边界条件
表4 PSO参数的初始化
2.2 PSIM和Simulink中的联合仿真
PSIM软件具有专用于电力电子和机器控制的高级功能,具有快速模拟速度,强大的算法,强大的波形处理和友好的用户界面。MATLAB / Simulink提供了一个适用于控制器设计和动态系统仿真的图形仿真环境。 但是,模拟的
MATLAB / Simulink中的电子电路的速度相对较慢。Acciani 等人(2009)对开关电路的时域分析的不同软件进行比较研究和报告,PSIM-Simulink共模拟给出了最好的结果。Khader 等人(2011)还建议在电力电子课程和研究中应用PSIM和Simulink协同仿真。 Yongchang等人(2006)的一项研究通过实施三级可调速驱动器来验证PSIM-Simulink协同仿真平台。PSIM提供了一个基于S函数的附加模块SimCoupler,它提供了PSIM和Simulink之间的接口。 使用协同仿真,PSIM在功率仿真和MATLAB / Simulink的控制仿真能力的能力得到充分利用。
2.3 使用S函数的建模和仿真
S函数提供了一种方便的机制来实现使用Simulink方程解算器交换运行时数据的自定义控制块。 每个都使用一组回调方法来执行各种模拟任务
模拟阶段(Mathworks,2007)。模拟阶段如图5所示。由于与Simulink的无缝集成,实现为S函数的算法比普通m文件运行得快得多。在线优化期间,该功能大大增强了仿真速度和结果的准确性。 模糊逻辑控制器和粒子群优化算法被编码为使用C代码的Level-2 S函数。C-Mex S功能可以在不使用Matlab工作区的情况下在各种优化程序之间进行直接数据交换。
3模糊逻辑控制器设计
模糊逻辑控制器的结构如图6所示。 在(4)和(5)中定义的第k个采样时刻有两个输入变量,误差E(k)和误差CE(k)的变化。E(k)是PV阵列功率电压特性的梯度。 Ppv(k)是PV阵列的瞬时功率,Vdc(k)是DC链路电压。当E(k)gt; 0时,系统向最大功率点(MPP)移动; 在E(k)= 0处,系统在MPP处操作; 并且对于E(k)lt;0,系统正在远离MPP。
E(k)和CE(k)的输入隶属函数(MF)使用梯形和三角形MF定义.MF如图7所示。 每个输入MF由两个参数x1和x2定义。FLC有九个规则,如表2所示。 规则库使用零阶Takagi-Sugeno模糊模型建模。 每个规则的DC总线电压基准的输出变化用(6)估计。将为规则库中的每个输出MF确定常数a,b和c。
一个FLC的优化参数被编码为如(7)所示的向量Si,其中Xi和Yi分别由输入MF的参数E(k)和CE(k)组成。Zi由(6)中定义的三个输出MF参数组成。 因此,一个FLC使用31个参数来定义。
图8 优化步骤的例证。
4使用PSO的模糊逻辑控制器优化
4.1 粒子群优化原理
粒子群优化是基于群体的运动和智能的进化优化技术。它将社会互动的概念应用于解决问题。该算法由肯尼迪和Eberthart于1995年开发,用于模拟鸟的飞行模式,由三个因素控制:避免碰撞,匹配速度,和鸡群定心(Kennedy和Eberhart,1995)。开发人员观察到,鸟群的行为可以在优化中应用,通过使用被称为颗粒的潜在解的群体,其流过n维搜索空间。每个粒子的瞬时位置由(8)给出。
其中表示必须优化的问题的参数。最初,每个粒子位置是随机的,然后粒子以受到边界条件的随机速度移动。在时间步骤k 1,第i个粒子的速度由(9)给出。
图9 Simulink框图模型
表5 模拟参数
|
参数 数值 |
|
电网电压(Vrms) 110 V 电网频率(f) 50 Hz 电网滤波电感(L) 2mH 直流总线电容器(C) 10 mF 变频器开关频率(fs) 10 kHz 电流PI控制器 Kp = 12 Ki = 120 DC总线PI控制器 Kp = 0.25 Ki = 10 |
其中w是惯性系数; C1和C2分别是社会和认知率; Pi是粒子在运动过程中发现的最好的位置; Gbest是整个群体发现的最好的位置; rand()是一个在0和1之间的均匀随机数发生器; Dt是时间步长。 然后使用(10)来评估每个颗粒的新位置。
如果粒子位置违反边界条件,则当前速度被设置为零,并且使用(11)来评估新的速度,并且使用(10)重新评估新的位置。
4.2 使用基于S函数的PSO算法优化FLC
在(7)中定义的FLC参数使用(8)来编码。 颗粒的边界条件和PSO初始化参数分别在表3和4中给出。 积分时间平方误差(ITSE)在表达式(12)中用作成本函数。 Ppv是从PV阵列获得的功率,Pmax是最大功率,N是迭代次数。
选择10ls的基本采样时间Ts用于PSIM和Simulink中的共模拟。 选择0.8s的第二采样时间Td作为每个FLC用于运行系统的时间。 然后使用离散的固定步进解算器进行模拟。 有必要Td是整数以便使用固定步长解算器。 S函数用采样时间Ts和Td初始化; 人口规模,P; 和迭代次数N。采样时间Ts和Td分别记录两个事件SampleHit(0)和SampleHit(1)。
图10 优化的FLC输入成员函数。
图11 优化FLC规则表面
事件的发生用于控制优化过程。 使用PSO算法在每次迭代结束时更新FLC参数。 FLC参数的调谐在图2的流程图中示出。 A.8和示例程序清单在附录中提供。
在S函数的计算输出方法中测试事件SampleHit(0)的发生。 S函数方法如图5所示。 在该事件期间,有效的FLC接收误差(E)和误差变化(CE)的当前值,并计算电压参考DV的变化。 在(12)中的成本函数中使用的采样时间计数器k也在该事件期间更新。
在S函数的更新离散状态方法中测试事件SampleHit(1)的发生。 如果事件已经发生:当前FLC的适合度被更新; 循环计数参数如图8所示, 已更新; 并且系统控制从当前FLC转移到群体中的下一个。 如果迭代完成(即,群体中的所有FLC已被用于运行系统),则使用PSO
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[139835],资料为PDF文档或Word文档,PDF文档可免费转换为Word
您可能感兴趣的文章
- 饮用水微生物群:一个全面的时空研究,以监测巴黎供水系统的水质外文翻译资料
- 步进电机控制和摩擦模型对复杂机械系统精确定位的影响外文翻译资料
- 具有温湿度控制的开式阴极PEM燃料电池性能的提升外文翻译资料
- 警报定时系统对驾驶员行为的影响:调查驾驶员信任的差异以及根据警报定时对警报的响应外文翻译资料
- 门禁系统的零知识认证解决方案外文翻译资料
- 车辆废气及室外环境中悬浮微粒中有机磷的含量—-个案研究外文翻译资料
- ZigBee协议对城市风力涡轮机的无线监控: 支持应用软件和传感器模块外文翻译资料
- ZigBee系统在医疗保健中提供位置信息和传感器数据传输的方案外文翻译资料
- 基于PLC的模糊控制器在污水处理系统中的应用外文翻译资料
- 光伏并联最大功率点跟踪系统独立应用程序外文翻译资料


