
英语原文共 7 页,剩余内容已隐藏,支付完成后下载完整资料
具有用于光刻投影透镜的多闭环回路的温度控制系统
聂晓飞 李晓萍 何燕
1中国武汉华中大学数字化制造设备与技术国家重点实验室
2上海师范大学天华学院
摘要:图像质量是光刻工具最重要的规格之一,受温度影响,振动和投影透镜(PL)的污染。传统的局部温度控制方法更容易引入振动污染,因此开发具有多闭环的温度控制系统来控制PL内部的温度隔离振动和污染的影响。提出了一种新的远程间接温度控制(RITC)方法冷却水循环进行PL的间接温度控制。加热器和冷却器嵌入式温度控制单位(TCU)用于调节冷却水的温度,TCU必须远离PL,以便影响可以避免振动和污染。结合内部级联控制的新型多闭环控制结构
结构(CCS)和外部并联级联控制结构(PCCS)被设计为防止大惯性,多延迟和
RITC系统的多重干扰。应用非线性比例积分(PI)算法进一步增强收敛速度和精度的控制过程。实施不同控制循环和算法的对比实验来验证影响控制性能。结果表明,具有多闭环的温度控制系统达到了精度规格为plusmn;0.006℃,收敛速度快,坚固性强,自适应性强。这种方法已经成功使用在产生100nm临界尺寸(CD)的图案的光刻工具中,其性能令人满意。
关键词:投影镜头,遥控间接温度控制,级联控制结构,并联级联控制结构,非线性比例积分(PI)算法
- 简介
随着集成电路的缩小,临界尺寸变小(CD)被要求进行制造的控制过程越来越严格。 先进的光刻技术工具,作为最重要的制造设备过程要求对其进行更严格控制微环境,如温度,清洁度,空气压力和湿度等。温度波动特别导致图像失真和图像平面偏移,从而成为影响影响因素的关键因素之一光刻工具的图像质量。 气温需要投影镜头(PL)内的精度接近0.01℃的岩石工具产生图案小于100nm。 也是一个快速的收敛速度需要PL内的温度来降低成本光刻所有权(CoO)。然而,实现这些目标有一个重大的挑战,因为加热器和需要冷却器控制温度操作远离PL ,否则表现将因其振动和污染而被破坏。另一个原因是PL有一个复杂的内部
包含数十个镜头的架构,导致几个惯性小时,所以PL内的温度响应相当慢,需要很长时间才能调整。 因此,新的结构和算法变得必要显着的控制在里面的温度PL。
许多温度控制结构已经被提出了。一个著名的古典方法是单一的闭环控制结构广泛应用于简单或低精度温度控制系统。 什么时候受控对象变得更加复杂或产生分布式扰动,级联控制结构(CCS)提出提高精度和收敛速度。前馈预测控制结构已被证明具有更好的延迟系统性能。另一个有效的方法,并联级联控制结构(PCCS)也被用于延迟系统的分布式干扰。 但使用方法提到以上,难以实现高精度,快速PL内温度的收敛速度。
在本文中,一种新的方法,即多重闭环内置温控系统提出CCS和外部PCCS。 本文是大致分为四个部分。 第一部分解释了远程间接温度控制方法的原因被申请;被应用。 在第二部分是一个多闭环温度控制结构进行了分析。 在第三部分,单双输入双输出非线性比例积分(PI)建立了算法来提高收敛速度精度控制过程。 在本文的最后一节,对比实验验证了这样的效果,最后得出结论。
- 远程间接温度控制方法
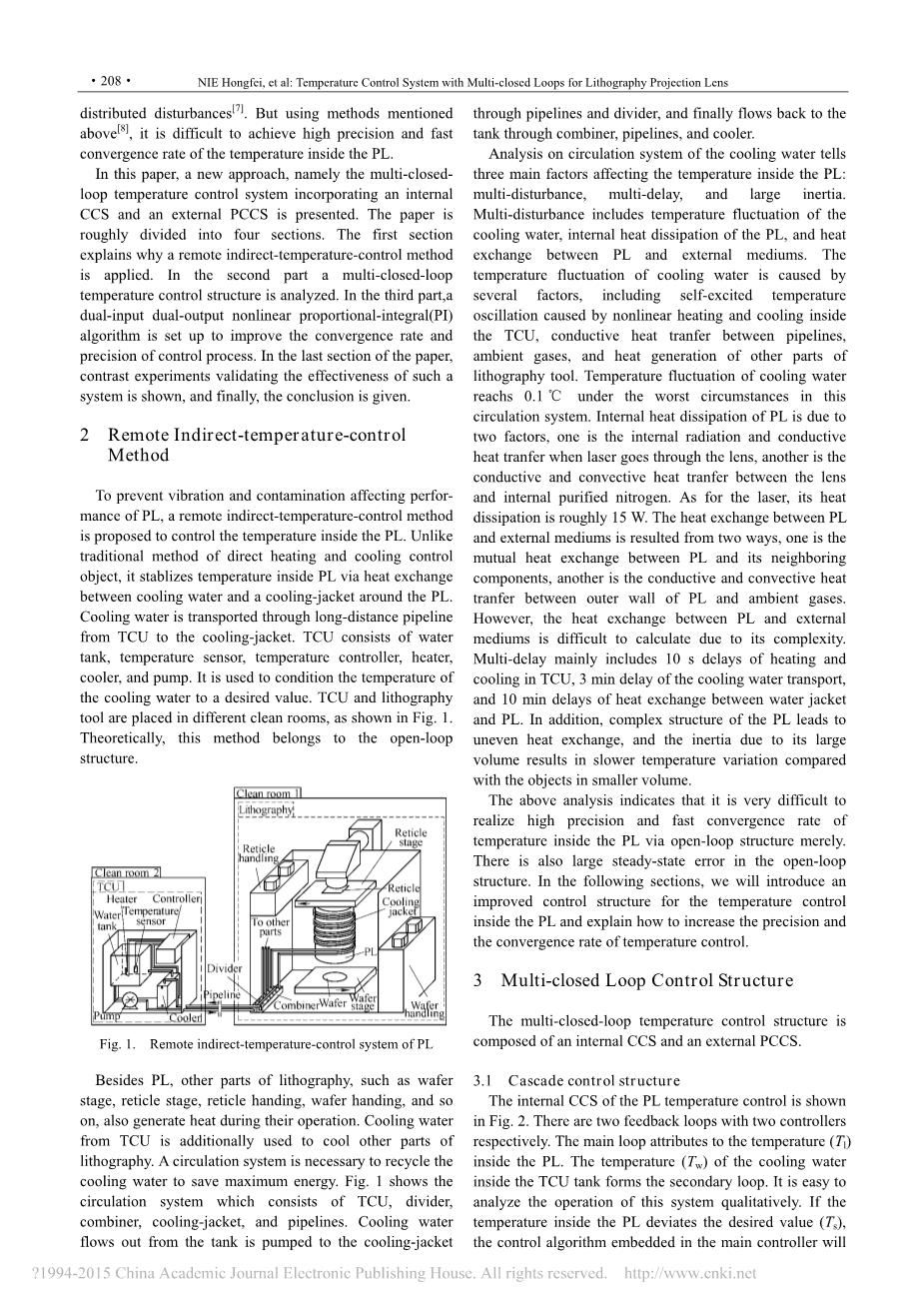
防止振动和污染影响性能的PL,一种远程间接温度控制方法被提出来控制PL内的温度。不像传统的直接加热和冷却控制方法对象,通过热交换稳定PL内的温度冷却水和PL周围的冷却套之间。冷却水通过长途管道输送从TCU到冷却套。 TCU由水组成罐,温度传感器,温度控制器,加热器,冷却器和泵。 它用于调节温度冷却水达到所需值。 TCU和光刻工具放在不同的洁净室中,如图所示1。理论上这种方法属于开环结构体。构体除了PL,其他的光刻部分,如晶圆舞台,标线台,标线片处理,晶圆处理等在操作过程中也会产生热量。 冷却水从TCU另外用来冷却其他部分光刻。 循环系统是循环利用的必要条件冷却水以节省最大能量。 图 1显示循环系统由TCU,分频器,组合器,冷却套管和管道组成。冷却水从罐中流出的液体通过管道和分配器被泵送到冷却套管,最后流回油箱通过组合器,管道和冷却器。
冷却水循环系统分析说明影响PL内温度的三个主要因素:多干扰,多延时和大惯性。多干扰包括温度波动冷却水,PL的内部散热和热量PL与外部介质之间的交换。该导致冷却水的温度波动几个因素,包括自激温度由非线性加热和内部冷却引起的振荡管道之间的TCU,导热传热,环境气体和其他部分的发热光刻工具。冷却水温度波动在最恶劣的环境下达到0.1℃流通系统。 PL的内部散热是由于两个因素,一个是内部辐射和导电当激光经过透镜时,热传递,另一个透镜之间的导电和对流热传递和内部净化氮气。对于激光,它的热量耗散量约为15W。PL之间的热交换外部媒介是由两种方式产生的,一种是PL与其邻近地区之间的相互热交换组件,另一个是导电和对流热在PL的外壁和环境气体之间传递。然而,PL和外部之间的热交换由于其复杂性,介质难以计算。多延时主要包括10秒的加热延迟在TCU冷却,冷却水运输延迟3分钟,水套之间热交换延迟10分钟和PL。此外,PL的复杂结构导致热交换不均匀,由于其惯性大体积会导致较慢的温度变化物体体积较小。
以上分析表明,这是非常困难的实现高精度,快速收敛速度PL内的温度仅通过开环结构。在开环中也存在很大的稳态误差结构体。 在以下各节中,我们将介绍一下改善温度控制结构在PL内部,并解释如何提高精度温度控制的收敛速度。
3多闭环控制结构
多闭环温度控制结构是由内部CCS和外部PCCS组成。
3.1级联控制结构
图1中显示了PL温度控制的内部CCS在。 有两个控制器的反馈回路分别。 主循环属于温度(T1)在PL里面 冷却水的温度(Tw)TCU罐内形成二次回路。 很容易定性分析该系统的运行情况。如果PL内部的温度偏离期望值(Ts),嵌入在主控制器中的控制算法将计算一个新的冷却设定值(Tt)水通过比较测量的偏差温度T1和期望值Ts。 然后新的设定值Tt发送到温度控制器TCU。 随后根据之间的偏差测量温度Tw和新设定值Tt,控制TCU中的算法计算加热器的输入冷却并加热或冷却冷却水TCU油箱达到新的设定值。所需的设定值PL内温度的值由机组常数给出。 T1控制回路是一个缓慢的控制回路。Tw控制环路是一个快速的控制回路,可以快速的遵循主回路设定值Tt。 当一个新的setpiont Tt发送到TCU,需要几分钟的时间将TCU罐中的水温调节到新的水位设定值。 二次回路具有很强的抑制作用其内部干扰的能力。 另外也可以减少主要的非线性和延迟的影响循环。
图3显示了控制原理图级联控制系统详细介绍。 在里面以下图和方程式,Gt(s)表示加热器和冷却器的传递功能,Gp(s)表示管道的传递函数,G1(s)代表PL的传递函数。 Gm(s)代表主控制器和Gs(s)的传递函数表示二次控制器的传递函数。Hm(s)表示主循环的传递函数测量装置和Hs(s)表示传递函数的二次回路测量装置。tau;t表示延迟TCU罐中的冷却水,tau;p代表通过管道的冷却水的延迟,tau;l代表PL内部热交换的延迟。Nt(s)表示TCU的外部干扰,Np(s)表示管道的外部干扰,Ne(s)代表PL的外部干扰,Nn(s)代表了PL的内部干扰。RL(S)表示PL和Rt(s)内的输入温度代表冷却水的输入温度
TCU坦克。 Cl(s)表示内部的输出温度PL和Ct(s)表示输出温度在TCU罐中冷却水。
输入和输出的传递函数二次回路可以表示为
在二次循环的稳定状态下,输出Ct(s)约等于输入Rt(s)。 所以
可以在主回路中输入和输出的传递函数简化为
早期的研究表明,PL的时间常数是约4小时。 Gl(s)的传递函数被识别为
Gp(s)的传递函数被识别为
对于简单的闭环CCS,很容易消除稳态误差。 然而,根据方程式 (2和
(3),PL内温度的收敛速度为由于延迟项tau;p,从起步到稳态缓慢
和tau;1。 同时,难以实现高精度的PL内的温度由于干扰
术语Np(s),Ne(s)和Nn(s)。 在稳定的条件下状态,当瞬间温度波动时冷却水由于Np(s)而超过0.1℃Ne(s),PL内的温度波动超过0.01℃。 需要几个控制周期才能到达下一个稳定状态。 因此引入PCCS来改善控制性能。
3.2并联级联控制结构
外部PCCS如图4所示。这个数字隐藏着控制循环Tw并识别其中的主要组件
系统为块。与CCS相比,有还有两个控制回路,分别有两个控制器,一个是PL内部的温度(T1)的主回路,另一个是温度(Tc)的辅助回路的组合器中的冷却水。不同之处在于主控对象和辅助控制对象并行,并且子对象的输出不是输入的主要对象。在这个系统中,控制算法嵌入在主控制器中确定一个新的最优温度(To)冷却水的设定值根据T1和Ts之间的偏差组合器。然后在子控制器中进行控制算法根据偏差计算TCU的输入在Tc和To之间。 T1控制循环是一个缓慢的控制循环。 Tc控制回路是一个快速的控制回路用于跟踪和预测最佳温度设定值
组合器上冷却水的价值很快。什么时候PL内的温度是所需的值组合器的冷却水温度为最佳温度。这个最佳温度是保存并保存为常数。从扰乱的角度禁止,辅助回路根据操作相似的前馈控制原理间接前馈控制角色。不同之处在于必须对前馈控制进行干扰测量结构,而PCCS可以应用于不可测量的干扰的另一个优点PCCS是可以加快收敛速度的主循环。
图5显示了并联的控制原理图级联控制系统详细介绍。 在里面以下图和方程式,Gc(s)表示组合器和冷却水的传递功能Gd(s)表示副控制器的传递函数。 Hd(s)表示传递函数辅助回路测量装置。 Rc(s)表示输入组合器的冷却水温度。抄送(S)代表冷却水的输出温度组合器。
输入和输出的传递函数辅助循环由给出
在辅助循环的稳定状态下,输出Cc(s)近似等于输入Rc(s)。 所以可以在主回路中输入和输出的传递函数减少到
比较方程 (2),(3)和(7),我们可以看到扰动项Np(s),Ne(s)和tau;p的延迟项是与主循环隔离,只有扰动项Nl(s)和延迟项tau;l保持在主循环中。 所以辅助回路的引入实现了分离的多延迟和多干扰物理结构和隔离非线性的影响,多重延时,多重干扰为主控制目的。 这种结构也降低了难度控制器设计。 即使有一些温度波动的冷却水也可以由附属控制人补偿。 结果,PL内的温度可以控制得很高精度和收敛速度快。
4非线性比例积分算法
度进一步提高系统收敛速度精准,双输入和双输出智能控制器嵌入式非线性PI算法被设计为如图6所示。 PL内的温度偏差e1和冷却水的温度偏差e2组合器是控制器的输入。 的输出控制器是温度设定值TtTCU罐内的冷却水和温度最佳冷却水的设定值To组合。
智能算法嵌入到控制器中。它包括两个层次,根据理想的动态响应分为控制过程的五个阶段曲线。算法的上层次确定五个阶段之间的切换和选择已经在我们以前的工作中进行了调查[10]。该低层次使用的非线性PI算法将在以下段落中讨论。考虑到多干扰特性温度控制系统,优先选择PI算法而不是比例积分微分(PID)算法,因为差分项目将触发高频振荡并增加稳态误差。图。图7显示了控制原理图非线性PI算法,在下图和方程式,u1表示温度设定值TCU罐内的冷却水,u2代表最佳冷却水的温度设定值在组合器A11表示e1的PI控制律对u1的贡献,A12表示e1的PI控制律对u2的贡献,A21代表e2的PI控制律对u2的贡献,A22代表PI控制律e2对u2的贡献。 W11,W12,W21,W22表示数据融合系数。
控制算法可以表示为
其中i = 1,2,j = 1,2,Delta;A为基本离散增量式PI控制算法
其中Delta;e(k)= e(k)-e(k-1),KP表示比例系数,KI表示积分系数k
表示采样序列,ui(k-1)和ui(k)表示控制器分别输出(k-1)和k时刻,e(k-1)和e(k)表示(k-1)和k处的偏差信号时刻。
数据融合系数由制定规则。 详细规则如下如下:
(1)如果| e1 |gt; a1,则W11 = 1,否则W11 = 0;
(2)如果|Delta;e1|gt; a2,那么W12 = 1,否则W12 = 0;
(3)如果| e2 |gt; a3,则W21 = 1,否则W21 = 0;
(4)如果| Delta;e2 |gt; a4,则W22 = 1,否则W22 = 0。
其中a1表示由下式确定的偏差阈值PL内的温度的稳态误差,a2表示由此确定的扰动阈值PL内部温度的瞬态误差,a3表示由...确定的偏差阈值冷却水温度的稳态误差组合器和a4表示扰动阈值由冷却水的瞬态误差决定组合器温度。
根据生产规则和投入信息控制过程中,16种不同获得算法。 控制器可以任意选择的算法根据输入数据的灵活性。 这会不仅提高了适应性和收敛性算法,也增强了鲁棒性系统和抗干扰能力。
5控制实验验证结构与算法
建立一个实验平台来验证本文提出的方法的有效性如
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[138533],资料为PDF文档或Word文档,PDF文档可免费转换为Word
您可能感兴趣的文章
- 饮用水微生物群:一个全面的时空研究,以监测巴黎供水系统的水质外文翻译资料
- 步进电机控制和摩擦模型对复杂机械系统精确定位的影响外文翻译资料
- 具有温湿度控制的开式阴极PEM燃料电池性能的提升外文翻译资料
- 警报定时系统对驾驶员行为的影响:调查驾驶员信任的差异以及根据警报定时对警报的响应外文翻译资料
- 门禁系统的零知识认证解决方案外文翻译资料
- 车辆废气及室外环境中悬浮微粒中有机磷的含量—-个案研究外文翻译资料
- ZigBee协议对城市风力涡轮机的无线监控: 支持应用软件和传感器模块外文翻译资料
- ZigBee系统在医疗保健中提供位置信息和传感器数据传输的方案外文翻译资料
- 基于PLC的模糊控制器在污水处理系统中的应用外文翻译资料
- 光伏并联最大功率点跟踪系统独立应用程序外文翻译资料


