英语原文共 12 页,剩余内容已隐藏,支付完成后下载完整资料
由双波段雷达测定积云内所含的液态水量
ROBIN J. HOGANlowast;, NICOLAS GAUSSIAT AND ANTHONY J. ILLINGWORTH
Submitted to J. Atmos. Oceanic Technol., August 2004; Revised December 2004
摘要
有一种技术是运用35GHz和94GHz波段垂直雷达的微分衰减来检索积云中的液态水量(LWC)。毫米波的衰减与LWC成正比,且随着频率的增大而增加,因此无需做任何有关液滴尺寸分布的性质的假设即可将LWC检索出来。并且雷达也无需细致地校准。相较于许多积云方面的雷达技术,它的一个明显的优势是细雨滴(直径在50micro;m左右)的降落不会对LWC的检索产生影响,即使它作为雷达信号的主要组成部分,也依然不会影响LWC的检索。它的重要性在于,超出94GHz雷达探测范围600micro;m 的液滴降落是很少出现的。我们利用激光云高仪通过在云的下部降落的细雨滴来确定云底的位置。0.04 g mminus;3左右的精度可以通过1分钟和150m(2倍距离范围)的平均来实现,但对于之前建议的双频率10GHz和35GHz,相应的准确度就会大大降低至0.34 g mminus;3。我们首先利用从海洋层积云剖面上测得的飞行器尺寸的图谱来模拟LWC的检索,然后从两种情形的研究得出结果,一个是在英国南部的Chilbolton使用2个云雷达,另一个是在Oklahoma的大气辐射监测点使用云剖面雷达系统。我们发现这种技术测得的液态水路径与微波辐射计测得的值吻合良好,它们之间的差异也接近辐射计检索的准确度。在混合积云的情形下,剖面接近绝热。
简介
对于所有的云来说,低层云和积云对地球的辐射预算是最重要的,因为它们都是光学厚的并且全球覆盖广泛。通过将大部分入射的太阳辐射反射回宇宙空间,并在长波中以类似的亮度温度向地球表面发射,它们对气候有降温作用(Randall et al. 1984; Slingo 1990)。
人们已经认识到云雷达在测量积云方面的潜力,并且开发了利用微波辐射计测量柱体的综合含水量的算法,并根据雷达反射率对其进行高度划分(Frisch et al. 1998)。这种方法的主要困难在于,积云中经常会有小范围的“小雨滴”(直径大于约50micro;m),它们可以主导雷达反射率并且对LWC有贡献。Fox和 Illingworth (1997) 发现它们在大西洋积云过渡实验(ASTEX)中的大部分海洋积云样本中无处不在。毛毛雨在大陆积云中也很常见,并且限制了单雷达技术的适用性来检索LWC和有效半径。
液滴的一个有用的特性是,只要它们小到足够在瑞利体系中衰减,它们的微波辐射就与LWC成正比并随频率增加。因此利用两个波长测得的反射系数的差异来推断LWC在原则上是很简单的,而无需诉诸任何经验关系。该方法进一步的优点是它对雷达的绝对标定不敏感;只需要测量反射率差异的能力。Atlas(1954)首先提出用微分衰减来测量LWC,并且最初的设想是测量雨水的含水量。Eccles和Mueller(1971)建议使用3GHz和10GHz波段的雷达来估计对流风暴中的LWC,但在实践中发现,衰减只在相对较长的路径下是可测量的,并且在大雨中对衰减贡献最大的雨滴往往大到使瑞利逼近不再适用,并且衰减不再与LWC成正比。此外,具有操作意义的通常是降雨概率,所以需要运用经验关系来把LWC和降雨概率联系起来。相比之下,在低云的研究中,LWC是重要的参数,而对衰减贡献最大的液滴(即含有液态水的液体),其直径均不超过50micro;m(Miles et al. 2000),甚至在94GHz波段也比波长小两个数量级,并且在瑞利体系中是稳固的。
Martner et al. (1993) 报告了在10GHz和35GHz的双波长雷达水平扫描中LWC的测量结果,但在10℃的液态水中,两种波长每g mminus;3的差分衰减仅为1.5 dB kmminus;1,并且仅在4km或更低的分辨率下才可测量。Vivekanandan et al. (1999,2001) 使用相同的两个频率为获得过冷云层仰角1.5°的云底的LWC,但发现对超过750m(10 gates)的范围取平均并且对至少30s的数据取平均来足够地减少随机误差是有必要的。在本文中我们使用35GHz和94GHz雷达,其差分衰减为7.1 dB kmminus;1 (g mminus;3)minus;1。这即使是对垂直指向的仪器也明显是可测量的,并且通过足够的时间平均即可获得积云中垂直方向上的LWC分布。
在第二部分将会给出该算法的数学表达式,在第三部分将会给出该算法可能的准确度。在第四部分,我们将用飞机测量的积云云滴尺寸谱来进行模拟检索,然后将该算法运用于第五部分的真实数据,并且与微波辐射计得出的液态水路径(LWP)和假设剖面绝热计算出的LWP进行比较。
理论
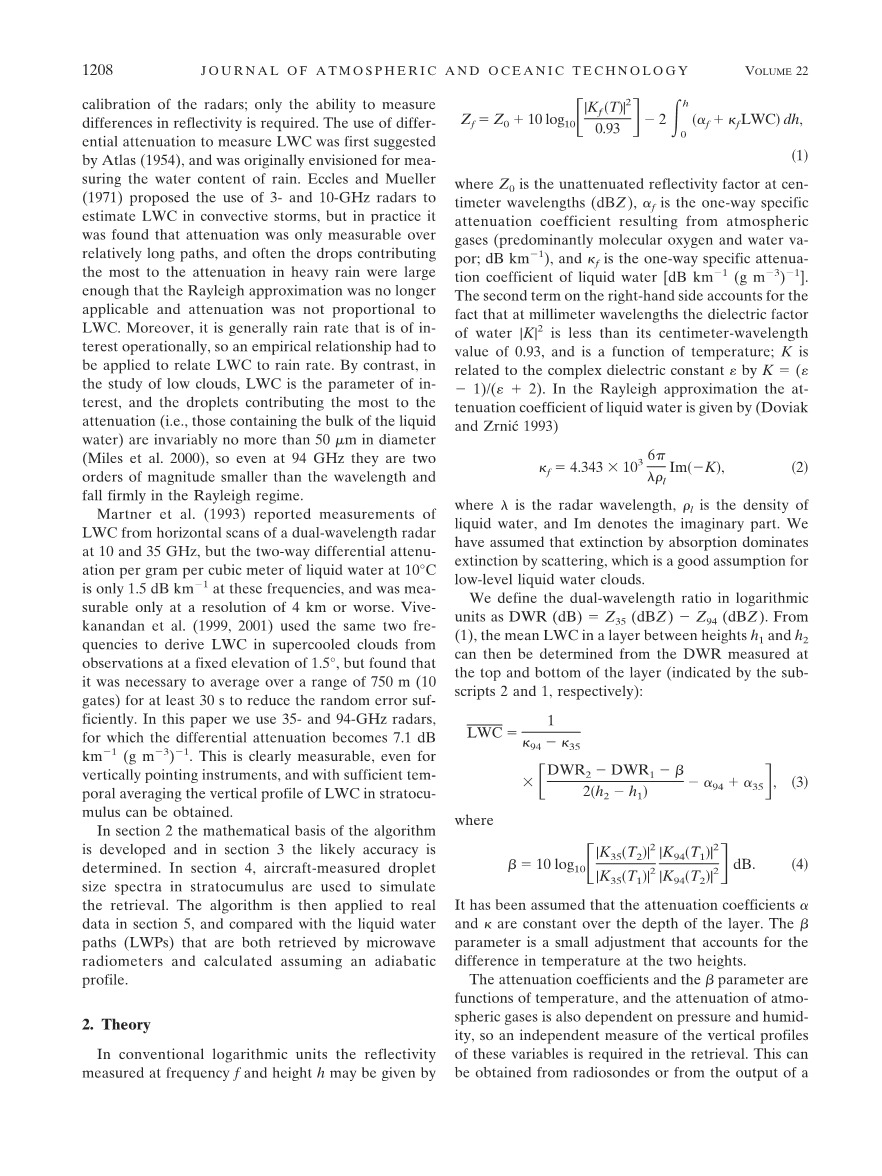
在常规对数单位中,在频率f 和高度h 上测得的反射率可由
(1)
给出,其中Z0是dBZ单位中厘米波长的未衰减反射系数,f是大气气体(主要是分子氧和水蒸气)在dB kmminus;1单位中的单向特定衰减系数,是液态水的单向特定衰减系数,单位是dB kmminus;1(g mminus;3)minus;1。等式右边第二项反映了毫米波长中水的电介质因子,|K|2小于它的厘米波长值0.93,是温度的函数。K 与复介电常数有关,,由式得出。在瑞利近似中,给出了液态水的衰减系数(Doviak and Zmicrsquo; 1993):
式中,为雷达的波长,是液态水的密度,而表示虚部。我们假设吸收的消光控制了散射,这对低层液态水云是一个很好的假设。
我们定义对数单位中的双波长比。由(1)式,在h1和h2之间的某一层的平均LWC可由在该层底部和顶部所测得的DWR确定(分别用下标2和1表示):
(3)
其中
假定衰减系数和在层的深度方向上是恒定的,参数是用于解释两个高度温差的一个小调整。
衰减系数和参数是温度的函数,并且大气气体的衰减也取决于气压和湿度,因此在检索时需要对这些变量的垂直廓线进行单独测量。这可以从探空资料或预测模型的输出中获得,尽管在实践中我们总是假定多云的空气对液态水是饱和的。在3b部分中,我们研究了温度误差对反演的灵敏度。我们使用Liebe et al.(1989) 的公式计算(和也相同),并且用Liebe(1985) 的线性模型计算作为温度、气压和湿度的函数的。
3.误差估计
在该部分中我们会估计该技术中可能出现的误差。LWC的准确度取决于反射率测量的精度、温度剖面的准确度和瑞利散射假设的有效性。进一步考虑的是雷达样本量的重叠;如果两种仪器被分离,或它们的波束宽度是不同的,那么误差可能会因云的不均匀而产生。这一效应难以量化,因为人们必须将云的变异性描述为规模函数,但它可以用3a部分描述的时间平均来减小。在第5部分中,我们使用不完全匹配的雷达样本量的真实数据得到了良好的结果,这一事实表明,只要雷达相互靠近,这种效应就很小。
a.反射因子对随机误差的影响
从(3)式中我们可以看出,LWC的检索对或中的系统(即校准)误差不敏感,而随机误差会对结果产生影响。假设和的误差(和)是独立的,每个双波长比的误差。因此,利用(3)式,LWC的误差与反射率的不确定性直接相关:
在附录中给出了在N范围内平均了M个时间脉冲后反射率(dB)的精度。
图1:使用10/35GHz和35/94GHz频率雷达和150m垂直分辨率(2 gates)的信噪比来检索LWC的误差,一个1分钟的dwell,T = 10◦C, sigma;w = 0.3 m sminus;1,且两频率有脉冲重复频率6250Hz。
Gates可由下式给出:
式中,是雷达的波长,SNR是线性信噪比,是脉冲之间的时间(即脉冲重复频率的倒数),是频谱宽度,定义为反射加权雾滴垂直速度在雷达脉冲体积中的标准差。
如果我们暂时考虑雷达是同样敏感且操作相同的脉冲重复频率的情况,通过组合(5)和(6),并且认识到(其中是范围Gate间距),我们得到
用典型值=0.3m/s(暗示着每秒在35GHz有150个独立脉冲,在94GHz有400个独立脉冲),=75m,T=10℃且SNRgt;gt;1,我们发现没有垂直平均的状态下精确到0.04来检索LWC需要近8分钟。然而,如果两个Gate做垂直平均,那么达到这个精度所需的时间将缩短至1分钟。在实验中,2个Gate的滑动窗口用于产生具有此精度的LWC场,但其垂直分辨率与原始数据相同。需要注意的是,积云可以有非常低的Z值,这(取决于雷达灵敏度)可以对应
表1:反演的含液体水量的误差()与1℃的温度误差有关。已假设具有1013hPa的气压和-6℃/km的失效率。
低信噪比值,并且图1显示了当SNRlt;1(对数单位0dB)时的误差增加。假设对两个雷达均为0.16ms,相当于一个脉冲重复频率6250Hz,它可以被计算出来。
图1也显示,在(7)中,10GHz和35GHz的交替频率组合中,波长和差分衰减的适当值的替换导致了对于1分钟的dwell和150m的分辨率(2 gates)增加八倍至0.34。我们得出的结论是,用这种频率组合来推导垂直剖面的LWC是不现实的,尽管在低海拔、平均超过750m和30s时,Vivekanandan et al.(1999)能够取得令人满意的结果。事实上,假设具有高的SNR,我们计算出这将产生一个理论上准确的LWC检索——0.04。
b.温度误差的影响
自然情况下,用于检索的温度、湿度和压力剖面都会存在误差。当有积云存在时,假设空气会非常接近饱和,气压只会通过谱吸收线的压力展宽影响气体衰减系数,因此热力剖面中的主误差来源于温度的误差。通过对温度T的判别式(3),我们得到LWC的系统误差与温度误差相关的表达式:
式中,是失效率。注意到温度的导数在相对湿度为100时是恒定的。与高估温度相关的最大误差来源于对特定湿度的高估和差分衰减的贡献,进而导致对LWC的低估。这种影响由(8)方括号中的第一个术语表示。表1给出了与温度1℃误差相关的检索误差,并给出了T和LWC的不同值。由于饱和特定湿度随温度的指数增加而引起的误差随温度的升高而增加,但即使在20℃,在检索到的LWC上的4℃误差的影响小于0.1g/m。我们预计温度会比2℃要高,所以一般情况下,误差应该是可接受的低,而且通常比Z中的误差小。
c. Mie散射小雨滴的影响
检索技术的误差可能会因为瑞利散射的假设无效而出现。图2a展示了用Mie理论计算的双波长比,用于单个球形下落和一个反指数大小分布,已知它代表毛毛雨是合理的(Ichimura et al. 1980; Wood 2000)。虽然云可以被认为是衰减的瑞利散射(因为它是非常小的云滴,其中包含了大量的液态水,因此负责衰减),但可以看出,大量大于600的雨滴的存在将大大减少低于。如果这在一个gate的空间导致大于0.1dB的变动,则根据(5)式,这将使被检索的LWC偏移0.05。这种水滴存在于等体积的直径的中间值大于约300的反指数分布中。请注意,由于共振效应在94GHz(e.g. van de Hulst 1957)随温度升高,DWR的小负值是可能的。
利用三波长(Gaussiat et al. 2003)可以明确地识别Mie散射,但在两个波长上测量的多普勒速度提供了相同的信息。在图2b中绘制了球滴和反指数谱的平均多普勒速度,并表明,如果速度低于2.5m/s,DWR的误差应小于0.1dB。平均多普勒速度可以受垂直空气运动的影响,因此更好的方法是使用在35GHz和94GHz的多普勒速度的差异;图2c表明,一旦这超过0.1m/s,就会对DWR有显著的Mie散射效应。
应该强调的是,是梯度的高度偏离瑞利散射导致了错误的LWC值。因此,如果云中的某一区域含有Mie散射,但上面和下面的区域是瑞利散射,那么Mie散射区顶部和底部的LWC误差将是相等的,相反,LWP不受影响。
d.冰粒存在的影响
就35GHz和94GHz的双波长衰减技术可能会在混合相云中遇到严重的困难,因为冰粒子在饱和环境中迅速增长,并且在94GHz的瑞利体系外散射得很好。先前研究了双波长雷达对混合相云(e.g. Gosset and Sauvageot 1992, Vivekanandan et al. 1999)的潜力,考虑了10GHz和35GHz的波长组合,从而减少了非瑞利散射在最高频率下的影响。然而,与35GHz和94GHz的组合相比,给定的液态水路径的差分衰减减少了近5倍,而35GHz的测量有时仍然会受到非瑞利散射的影响。因此,只可能通过增加第三波长来得到混合相云中的可靠结果。
因此,我们限制35GHz和94GHz衰减技术应用于纯液相云。与Mie散射小雨滴一样,多普勒速度的差异可以用来识别大的非瑞利散射冰粒子的存在,但也可以识别和排除可能只在云层顶部温度的基础上受到影响的云层。
4.利用飞机数据进行仿真
在这一节中,我们利用英国气象局C-130飞机A209的ASTEX通过积云,
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[18463],资料为PDF文档或Word文档,PDF文档可免费转换为Word
您可能感兴趣的文章
- 饮用水微生物群:一个全面的时空研究,以监测巴黎供水系统的水质外文翻译资料
- 步进电机控制和摩擦模型对复杂机械系统精确定位的影响外文翻译资料
- 具有温湿度控制的开式阴极PEM燃料电池性能的提升外文翻译资料
- 警报定时系统对驾驶员行为的影响:调查驾驶员信任的差异以及根据警报定时对警报的响应外文翻译资料
- 门禁系统的零知识认证解决方案外文翻译资料
- 车辆废气及室外环境中悬浮微粒中有机磷的含量—-个案研究外文翻译资料
- ZigBee协议对城市风力涡轮机的无线监控: 支持应用软件和传感器模块外文翻译资料
- ZigBee系统在医疗保健中提供位置信息和传感器数据传输的方案外文翻译资料
- 基于PLC的模糊控制器在污水处理系统中的应用外文翻译资料
- 光伏并联最大功率点跟踪系统独立应用程序外文翻译资料


