
英语原文共 6 页,剩余内容已隐藏,支付完成后下载完整资料
带卷曲橡胶气动执行器的微型柔性机械手
杉井知一、小笠幸子、鈴森康一
IEEE(美国电气电子工程师协会)成员:西岡靖貴
摘要
在医疗和生物技术领域需要柔性装置,因为它们要保证低机械阻抗下的高安全性。FMA(柔性微型驱动装置)是典型的柔性致动器之一,它由具有多个气室的纤维增强橡胶结构组成,能够实现气动弯曲运动,并且已经应用于机器人手、机器人腿等部位。 FMA的高电位形式已经由一些论文中报道的许多实验证实,然而在致动器的制造过程中,如何将增强纤维嵌入橡胶结构中则是个难题。
在这项研究中,我们的目标是开发一个使用纤维少但实现极大运动的FMA,它是一种进行卷曲运动和使用致动器的柔性机械手。我们使用非线性FEM(有限元法)和派生的高效形状来设计没有光纤的致动器。致动器通过微橡胶铸造工艺制造,其中包括用于模具的微加工工艺,微真空橡胶的模制工艺和通过准分子光进行表面改进的橡胶粘合工艺。致动器的基本驱动实验表明,它使卷曲运动与FEM操作结果达成一致,并且致动器可以抓住鱼卵而不断裂。此外,我们还做了一个柔软的机械手,其上包括三个卷曲致动器,它可以通过简单的铸造工艺制造。这只发达的机械手可以很好地进行开闭运动工作。
I.引言
在已经开发了的产生弯曲运动的几种微气动橡胶致动器中,FMA是典型的气动致动器之一,它是我们中的一人在上世纪80年代间开发出来的。这种致动器由具有多个气动室的圆柱形纤维增强橡胶结构组成。因为径向上的变形被纤维抑制,加压室只能在轴向上膨胀,而通过向每个室供应的压力的平衡,使致动器产生弯曲或伸展运动。实际上,该致动器已经应用于机器人手、机器人腿、管体检查机器人等方面,并使执行器的高电位得到了确认。
然而,由于纤维制造工艺的复杂,以及没有产生弯曲运动纤维的微尺寸气动致动器已经被开发,这些通过包括蚀刻工艺和/或立体光刻工艺等MEMS(微机电系统)工艺制造的致动器显示出引人兴致的性能。尽管它们中的一个可以通过多个腔室实现非常大的弯曲运动,但是这些致动器的一个腔室的最大弯曲角度近似为20度至70 度,因而能在两个方向上进行较大弯曲运动的制动器还没有被发表过。
在这项研究中,我们试图开发一个橡胶气动执行器以实现在两个方向上的非常大的弯曲运动,这个执行器本身是一种进行卷曲运动的简单无纤维结构,并且通过极为简单的制造工艺应用到柔性机器人手上。使用非线性有限元软件,有效的波纹管形状,使致动器卷曲运动。基于分析结果,通过用于模具的机械加工,真空橡胶模制工艺和通过准分子灯表面改进的橡胶粘合工艺来制造半径为1毫米的卷曲致动器。 在没有采用MEMS的这些工艺中,橡胶致动器的模具可以使用CAM(计算机辅助制造系统)自动实现。因此,采用MEMS工艺当然是非常有效的方法,这使得根据精度和形状来进行加工成为非常简单和可靠的过程。实际上,本研究中的模具可以以10微米的精度制造,在深度方向上具有弯曲形状,这意味在蚀刻工艺中需要复杂的工作,并且精度足以达到几百微米尺寸的橡胶致动器也要参与工作。此外,与立体光刻相比,模制方法具有作为橡胶材料种类而限制低的优点。通过受激准分子光,可以很容易地实现橡胶粘合而不产生任何粘合,因此即使在粘合表面上也可以保持均匀的材料特性。使用一个制造的致动器,可以通过基本实验来证实致动器的特性。在实验中致动器产生卷曲运动,这与FEM结果一致,并且可以通过施加正压和负压的方法来使致动器能够分别在顺时针和逆时针方向上运动。它抓住鱼卵的过程毫无疑问的成功了。此外,再制造由三个卷曲致动器组成的柔性机械手,而通过用加工工艺制造具有三个致动器图案和基部图案的模具来制造机械手的过程无疑是非常容易的。
通过实验,用负压和正压确认手的打开和闭合运动。
Ⅱ.使用非线性有限元法的试验设计
A.分析条件
为了确定使致动器能够产生卷曲运动的最佳设计,使用非线性有限元分析(Marc,美国MSC公司)。这种分析方法可以非常有效地解决非线性问题和进行设计橡胶材料的软机理。在本研究中,致动器材料使用作为两种组分的RTV(室温硫化)型硅橡胶(KE-1603-A-B,信越硅胶公司),并通过材料试验来发现材料性能。而由本试验的结果显示,硅橡胶表明出强烈的非线性。
对于材料非线性属性,我们采用了三阶MooneY-Rivlin函数来进行分析。它是近似非线性的主要函数之一。图1显示了材料试验的结果和近似MooneY-Rivlin函数。
图1 硅橡胶的材料试验结果和MooneY-Rivlin函数
B.设计和参数
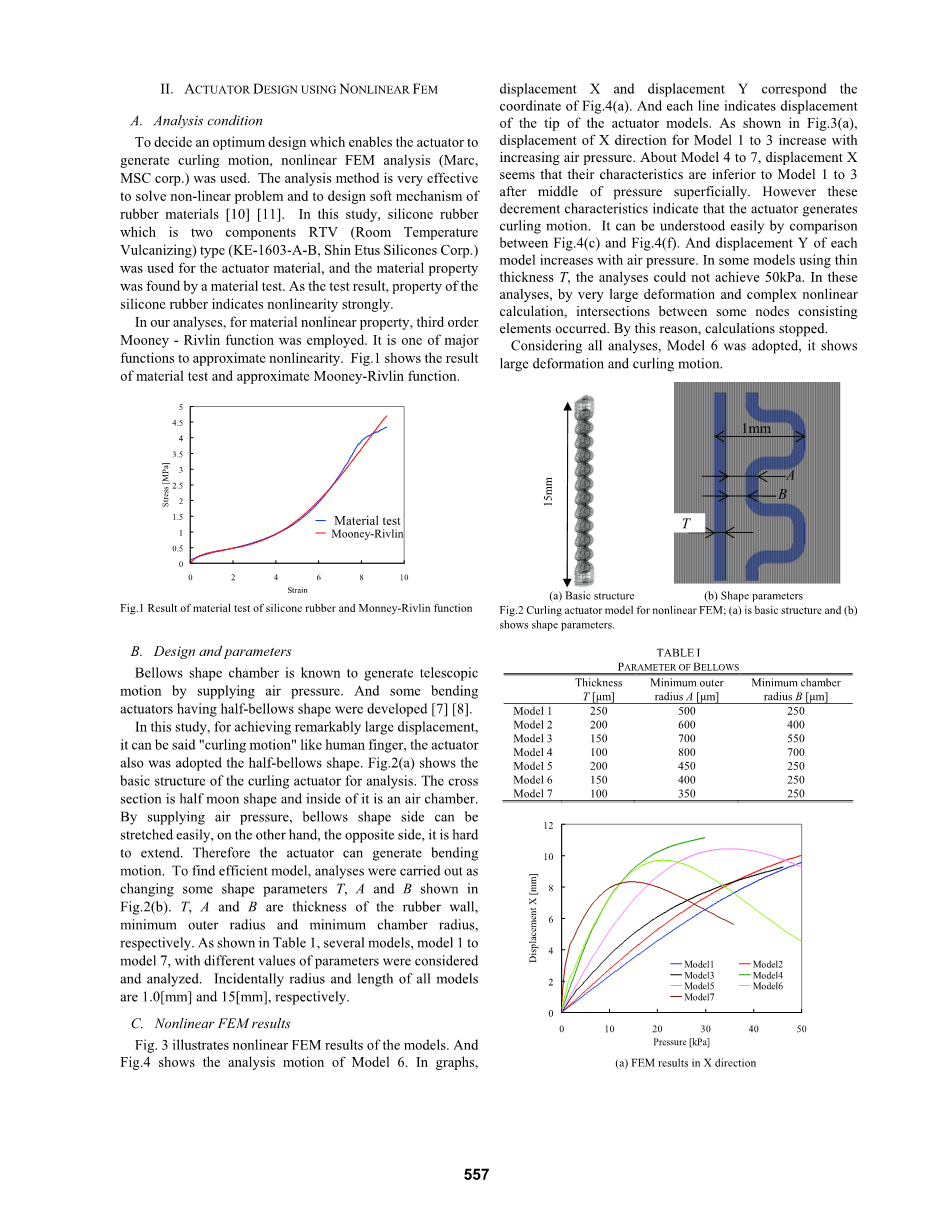
已知波纹管形室通过供应空气压产生伸缩运动。一些具有半波纹管形状的弯曲致动器被开发。在本研究中,为实现较大的位移,致动器采用半波纹管形状,以便像人的手指那样可以做出“卷曲运动”。图2(a)显示出了用于分析的卷曲致动器的基本结构。制动器的横截面是半月形,并且其内部是空气室。通过提供空气压力,波纹管形状侧可以容易地拉伸,另一方面,相对侧则难以延伸,因此致动器可以产生弯曲运动。为了找到有效的模型来进行分析,因此改变了一些形状参数T,A和B如图2(b)所示。T,A和B分别是橡胶壁的厚度,最小外半径和最小室半径。如表1所示,分析和考虑了几个模型,从模型1到模型7,都具有不同的参数值。另外,所有模型的半径和长度都分别取为1毫米和15毫米。
(a)基本结构 (b)形状参数
图2 非线性FEM的卷曲致动器模型;(a)是基本结构,(b)是形状参数.
表1
C.非线性有限元结果
图3出示了模型的非线性FEM结果,图4显示了模型6的分析运动。在图中,位移X和位移Y分别对应于图4(a)的坐标,每条线表示致动器模型尖端的位移。如图3(a)所示,模型1〜3的X方向的位移随着气压的增加而增加,而关于模型4〜7,位移X似乎在峰值表面后压力位移特性低于模型1至3。然而,这些递减特性正是表示致动器在进行卷曲运动,通过比较图4(c)和图4(f)可以很容易地理解。每个模型的位移Y随着空气压力的增加而增加,在一些使用薄厚度T的模型中,分析压力不能达到50kPa。在这些分析中,通过非常大的变形和复杂的非线性计算,产生了一些节点之间的交叉点,由于这个原因,计算停止。
考虑到所有的分析,最终决定采用模型6,因其显示较大的变形和卷曲运动。
(a) FEM位移X向结果
(b) FEM位移Y向结果
图3 几种形状模型的非线性FEM结果;(a)和(b)分别表示X和Y方向的位移.
图4 非线性FEM模型6的驱动分析;(a)〜(f)分别表示不同压强下致动器形变.
Ⅲ.固定制动器
A.加工工艺
卷曲致动器是通过粘合两个硅橡胶部件制成,其中一个是具有腔室空间的半波纹管部件,另一个则是平板部件。图5简单地展示出了制动器的制造过程,首先通过铸造分别制成半波纹管部分和板部分,然后使用具有准分子灯的夹具将两个部分结合。制造执行器的工作如下:
1.模具微加工工艺;
2.真空橡胶铸造工艺;
3.准分子光的橡胶粘合工艺;
在这项研究中,通过微加工制造过程的模具具有10微米的精度,这与MEMS工艺相比明显精度较差,然而对于该致动器而言,10微米的精度就足够了。此外,即使在主轴的旋转和进给速度等切削条件被消除之后,刀具甚至还是能非常容易和自动地加工出在深度方向上的弯曲形状。
图6所示的照片是通过机械加工制造的半波纹管部件的模具,其中(a),(b),(c),(d)分别是凸模、凹模以及(a)和(b)的特写图。
模具 (a) 半波纹管部件的成型
(b) 平板部件的成型
(c) 半波纹管和平板部件的粘合
图5 卷边致动器的制造过程
(a) 半波纹管部分的凸模 (b) 半波纹管部分的凹模
(c) 图(a)特写 (d) 图(b)特写
图6 橡胶半波纹管部件的制造模具
B.实验
图7展示出了卷曲致动器的实验设置。通过使用注射器来向执行器和空压传感器提供气压,而致动器的运动则由相机测量。可以通过对注射器的推拉操作来实现正压和负压,还可以通过压力传感器来测量正压和负压。
图8展示出了致动器每隔10[kPa]的运动情况,可以看出致动器产生了非常大的变形,而致动器的两端甚至可以在40[kPa]下接触。
图9表示出实验的结果与FEM结果,这两个结果意味着致动器尖端的位置在发生着如同图4所示的坐标变化。通过相机图像来检测实验数据,可知这两种曲线虽然在绝对压力处出现了误差,但是形状上却显示出相似的特性。另外,在使用内径为300微米,长为100毫米的空气供给管的情况下,假设致动器的前端的输出位移特性为一阶滞后元件,那么其时间常数则约为0.28秒。
图7 用于驱动卷曲制动器的实验装置
图8 施加正压力的卷曲致动器的实验结果
图9 实验结果与FEM分析结果对比
试验中也可以通过拉动注射器向致动器提供负压,如图10所示,致动器可以产生与正压卷曲方向相反的运动,当负压加到-16[kPa]时,执行器的两端开始接触。这些实验意味着具有简单结构的仅具有一个空气供应管的致动器就可产生顺时针和逆时针的卷曲运动,而与传统的气动弯曲致动器的运动相比,这些运动相当的大。
图10 负压卷曲制动器的实验结果
另外,图11展示出了通过致动器抓取和释放鱼卵的实验。 虽然鱼卵是软的,容易破碎,然而依靠着低机械阻抗,致动器却可以抓住和释放鱼卵而不使其破碎。
(a) 初始状态 (b) 抓取阶段
(c) 抓紧状态 (d) 释放状态
图11 运用制动器抓取和释放的鱼卵的实验
IV.微型柔性机械手
A.制造
开发了由三个卷曲致动器组成的柔性机器人手,如第1章所述,使用CAM加工工艺,其优点之一是可以自动制造含有复杂形状的深度方向,因此不需要单独制造构成手的三个致动器及各自基部的模具。包含所有零件的模具可以通过将CAM数据输入控制器一次来进行加工制造。
图12(a)出示了软手套铸造的的构造概念,即三个致动器和基座一起制造,其中基座由四部分组成,有两个是三角锥体,而另外两个则是四面金字塔。和一个四面金字塔有一个执行器和其他四面金字塔有两个执行器。 通过折叠每个基部可以实现手。 图12(b)展示出了从上面看下来的折叠方法,如图所示,所有部件都可以严格折叠,并且非常容易配置机械手,其中手的尺寸为8毫米times;10毫米times;18毫米。
图13出示了通过机械加工来制造机械手的模具,使用图13(a)和(b)所示的模具,就可以制作含有三个致动器的半波纹管部件,并且三个致动器的平板部分和机械手的基部可以由图13(c)和(d)的模具制成。铸造后,使用定位夹具将橡胶部件与准分子灯结合。 因此,机械手的制造方法简单且与卷曲致动器的制作方式相同。图14出示了制造出的机械手,图14(a)是折叠前部件,而图14(b)则是完成状态的微型柔性机械手。
(a) 未折叠时机械手模型 (b) 折叠流程的俯视图
图12 柔性机械手的配置模拟概念图
(a)三个致动器的半波纹管的凹模 (b)三个致动器的半波纹管的凸模
(c)三个致动器和基部的板件零件模具 (d)三个致动器和基部的板件零件凹模
图13 用机械加工制造的柔性机械手加工模具
(a) 未折叠的柔性机械手 (b) 完成的柔性机械手
图14 具有三个指端的微型柔性机械手
B.实验
用图15所示的机械手进行基本实验,每个致动器通过空气管使用注射器提供相同的空气压力,这样机械手就可以实现负压和正压的开阖运动。
图15 软性机械手的开阖运动实验
V.结论
我们开发了一
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[137282],资料为PDF文档或Word文档,PDF文档可免费转换为Word
您可能感兴趣的文章
- 饮用水微生物群:一个全面的时空研究,以监测巴黎供水系统的水质外文翻译资料
- 步进电机控制和摩擦模型对复杂机械系统精确定位的影响外文翻译资料
- 具有温湿度控制的开式阴极PEM燃料电池性能的提升外文翻译资料
- 警报定时系统对驾驶员行为的影响:调查驾驶员信任的差异以及根据警报定时对警报的响应外文翻译资料
- 门禁系统的零知识认证解决方案外文翻译资料
- 车辆废气及室外环境中悬浮微粒中有机磷的含量—-个案研究外文翻译资料
- ZigBee协议对城市风力涡轮机的无线监控: 支持应用软件和传感器模块外文翻译资料
- ZigBee系统在医疗保健中提供位置信息和传感器数据传输的方案外文翻译资料
- 基于PLC的模糊控制器在污水处理系统中的应用外文翻译资料
- 光伏并联最大功率点跟踪系统独立应用程序外文翻译资料


