
英语原文共 11 页,剩余内容已隐藏,支付完成后下载完整资料
外文翻译译文
无人驾驶车辆的桥接式合作传感与路线规划
苏吉特, 丹尼尔·伊·卢卡尼, 以及乔傲·索萨
摘要:无人驾驶车辆(AV)常被用于解决在大规模传感器部署中,不连续传感器网络集群的数据收集问题。我们认为,一个有效的AV数据收集策略应该利用i)彼此通信范围内的传感器之间的合作,形成一个传感器集群,ii)用于简化合作过程的高级编码和数据存储技术,以及iii)路径规划既是内容上的,也是意识上的合作。我们的工作是将有效收集数据的问题定义为一个具有通信限制的合作路线优化问题。我们还分析(网络)编码数据传输和存储,以简化传感器之间的合作以及通过AV进行的数据收集。我们分析了两种极端情况,即网络具有和不具有集群内协作的情况,并提供数值结果来说明它们之间的性能差距随着节点数目的增加而增加。研究表明,在100个传感器中的进行合作,可以收集的数据量比没有合作路径规划收集的数据量多3倍。
关键词:机器人传感系统,无人驾驶车辆,路径规划,网络编码,优化
一、简介
传感器,计算机和通信技术的进步使得大规模的传感器可以在广泛的地理区域进行部署。具有传感、通信和计算能力的传感器节点现在已经可以满足小尺寸、低功耗的要求。它的应用包括环境研究和军事行动。在大规模部署的传感器网络中收集数据是一个具有挑战性的问题。传感器数据的性质对通信有更高的要求,包括最小吞吐量和最大延迟的保证,这些都需要在设计数据收集策略和协议时加以考虑。另外,通信网络可能由断开的传感器集群组成。无人驾驶车辆(AV)控制和先进的通信技术是促成实现收集大规模数据和不连续的传感器集群网络的关键因素。在这个意义上,无人驾驶车辆充当渡船,用于收集,存储和传送传感器之间的数据。虽然以前的工作已经考虑过无人驾驶车辆充来进行数据收集,但主要是从车辆控制的角度来看这个问题,作为该控制的副产品,通信要求满足与否均可。
我们的方法不同于当下使用AV进行数据收集的方法,主要体现下列两个基本方面:
(1)我们立足于对问题的整体观点的研究,在这个问题中,沟通和数据收集是主要的控制。影响因素,而不是控制的副产品。
(2)我们充分利用以互联传感器集群和高级编码技术的协作,提高数据的可靠存储和可用性,为AV的访问作准备,并在AV的接收范围内提供更高的数据采集可靠性。
我们将使用网络编码[1]作为后文的统一机制,因为它的编码和解码对于传输和存储都是相同的。传输例如[1],[2];数据存储,例如[3] [4]。网络编码鼓励系统通过编码混合不同的数据包,而不是存储和转发通过网络路径的数据包的副本。在这种模式下,系统不再需要跟踪哪些数据包已被接收:接收器只需要针对累积足够的编码数据包来恢复数据。网络编码因此使得传感器能够存储来自其附近传感器的一些编码数据,这些编码数据在AV中与传感器集群中的一部分传感器进行通信时转化,以便于收集数据。AV不需要物理访问每个节点,这将减少每个集群的收集时间,从而提高整个系统的性能。
为了表现在是否有传感器合作的情况下从最佳路径路获得的期望收益,我们做出以下成果:
bull;基础分析:我们提出了一个模型和它的优化方案,使我们能够解决前面提到的面向通信的路径选择和规划问题,此外还可以研究集群内合作的优势。我们考虑了特殊情况,在此情况下可以用最小耦合解决数据传播和路径规划。
bull;算法设计:我们提出了基于par- ticle群的算法,解决了传感器网络在是否合作两种情况下的问题。我们的算法与传感器节点的数量非常匹配,最多花4秒计算100个传感器的路径。
bull;性能评估和比较:我们比较了我们的设计性能和顺序算法、贪婪算法、以及基于col- lection技术的旅行推销员问题的性能。我们还用数字说明了网络间的性能差距,并表明我们的合作算法在相同的任务时间内可以得到比tsp激励算法多3倍的数据。
二、相关工作
几十年来,最优路径或轨迹规划一直是一个基本的优化问题,这一问题通常针对不同的应用和目标函数来优化[5]。然而,无人机的航迹规划,特别是具有约束条件的飞行器,仅在最近才得到解决[6][7]。近来,通信感知路径和轨迹规划在不同的机器人和通信社区已经成为一个热门领域[8] [9] [10].。
通信感知路径规划问题通常用于多机器人的目标跟踪,其目的是为每个机器人设计路线以保持机器人之间的通信连通[11]。由于通信固有的问题和NP本身的问题,最优路径规划仍然是实时应用的一个开放性问题。大多数解决方案是用优化某些目标的启发式算法开发的,例如通信带宽[8],干扰[12]。
我们的方法旨在提出AV规划其路线的策略,以满足一定的通信和网络要求。因此,我们的问题不是纯粹的车辆路线规划[13],并且不使用多个AV的通信意识来确保正确的合作协调。最接近我们的工作的是参考文献[9],它研究了机器人访问传感器节点收集数据的特殊情况。特别地,参考文献[9]主要集中在关闭和唤醒传感器的策略上,以实现机器人等待传感器唤醒的采样时间和系统的总能量消耗之间的最优情况。然而,这一研究通信意识受到严重限制,传感器唤醒后仅用于机器人定位自己,以提高链路质量。我们将超越这个简化的情况来考虑I)使用网络编码的相邻传感器节点之间的协作,和II)基于通信目标和信道限制的轨迹规划。
网络编码首先出现为信息论组播问题[1]。参考文献[14]和[15]在网络上显示的线性码足以建立任何可行的多点连接。随机线性网络编码(RLNC)[16]被应用于实际之中,其中网络中的节点是使用伽罗瓦域中的随机系数产生信息符号的线性组合。通常,这些随机系数被发送到携带编码码元分组的数据包的首地址中,这使得接收机能够学习编码矩阵并通过高斯消去法恢复原始数据。网络编码因此从信息理论结果过渡到现实系统,应用到增加吞吐量[17]、减少延迟[18][19][20]、降低能量[21]、增加数据持久性[2]、增强点对点内容递送[22 ]、数据传播[23]和分布式存储[3][4]之中。我们的工作不同于以前的工作,因为数据的传播和存储不是由内容主导的,而是由与最终收集数据的AV的重要交互作用驱动的。在我们的工作之前中,没有考虑使用应用驱动多AV进行的传播、存储和数据收集的方法。
三、问题定义
我们主要研究收集来自N个不同地理位置的传感器发送的数据的最大路径。该区域是有界的,并用X sub; R2.表示。每个传感器节点表示为Si,其位置是Li = {xi, yi}, i = 1, . . . , N。传感器节点的集合表示为N。传感器节点的通信范围可以足够大以允许与其他传感器通信。假设对于Ck,,K=1,hellip;k,均由连接节点的子集组成。为了简单起见,任何传感器节点SI都被表示为S。
我们假设有一个单独的AV,其目的是在传感器处收集数据并将其传送到位于Lb = {xb, yb}.的基站(BS)。AV的位置被表示为x = {xa, ya},并且具有V m/s的速度。我们假设保持通用性,即AV从BS发射,并且必须返回到它。如果在通信范围内,所有传感器都能够与AV和彼此通信。假设AV的准备时间和从一个传感器切换到另一个传感器的时间是可以忽略不计的。此外,还假设AV具有全向天线。每个传感器S具有Ms个数据包,以传递给BS,每个包的单位为比特,并假定该信息是已知的。这个假设对于某些应用程序和部署是有效的。例如,如果传感器部署以固定采样率测量环境数据,则已知采样的开始时间,并且任务的开始时间也是已知的,在每个传感器开始任务之前,规划者可以对可用的数据进行良好的评估。同时考虑设计一个系统来收集一定时间段的数据,从而在规划时知道每个传感器可用的数据量。
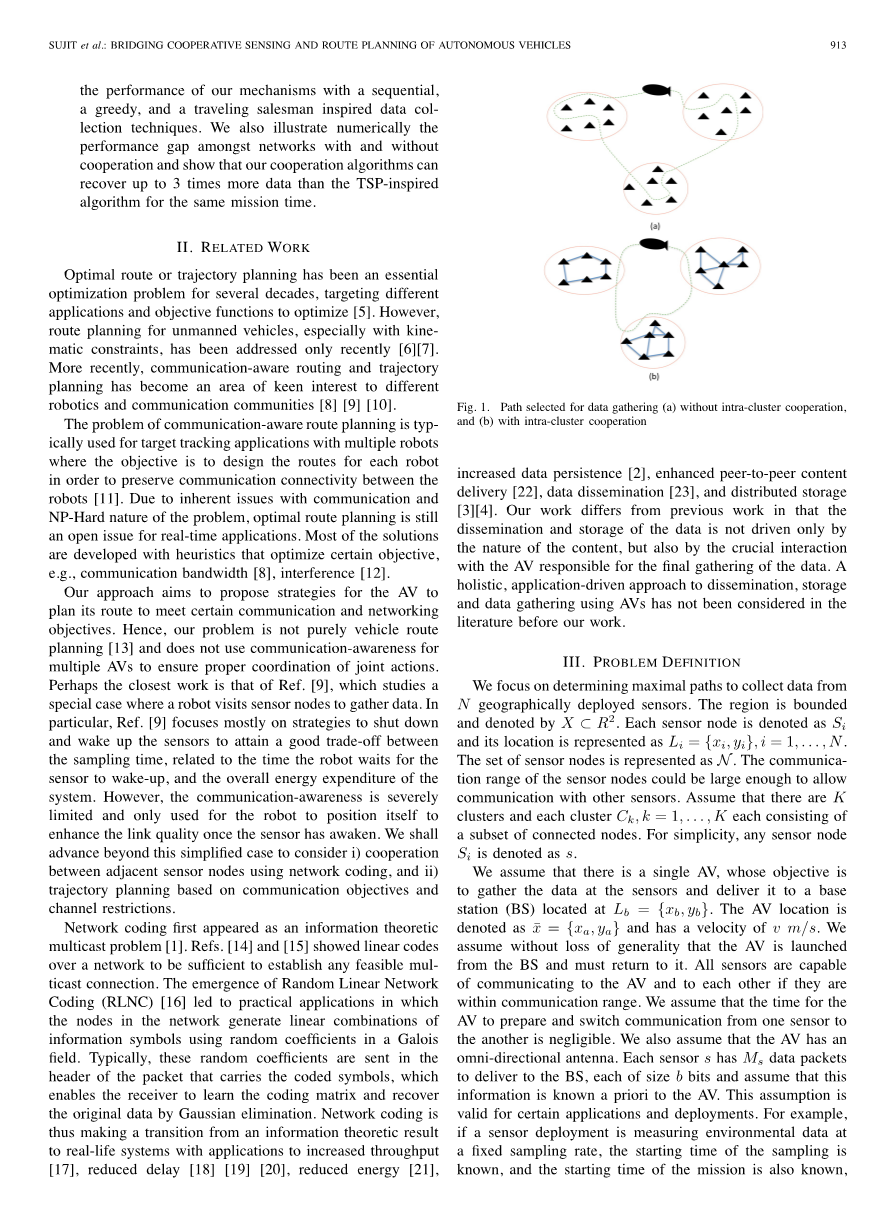
对于目前的分析,我们专注于两个特殊的情况:i)没有合作,其中AV需要通信到每一个传感器(图1.(a))和ii)完全协作,其中AV可以通信到每个集群中的传感器的子集以检索数据,因为传感器先前已经在彼此之间交换过数据(图1.(b))。对于后者,每个传感器在合作过程之后和在由AV收集数据之前可以包含多于其自身的数据。需要强调的是,我们不强加需要聚集数据的集群。还要注意图1提供了一个简单的例子来说明合作减少路径长度来收集数据的好处。最后,注意,第一种情况可以作为第二种情况的特殊情况,在每个集群中存在单个传感器节点。
图1(a)没有集群内协作的数据收集路径(b)集群内协作的数据收集路径
七、结论
在本文中,我们分析了AV数据收集在无线连接的传感器集群中的基本特征和局限性。对于集群内协作的情况,即集群内的传感器可以将它们的数据传输给其他传感器,需要对每个集群内的AV路径和数据的传播进行协作优化。然而,我们提出的机制,是以尽量减少路径规划长度和传播之间的连接而不影响性能为目的。网络编码的使用减少了传感器之间所需的协作,并且增加了系统与非协作集群相比收集大量数据的能力。
我们还开发了次优但高效的解决方案,用于从一组传感器节点收集大规模数据。
我们提出并设计一个路径规划的解决方案,该路径规划方案能在非合作和合作框架下最大化从传感器节点收集数据。
该解决方案基于粒子群优化算法,该算法优化了AV路径点的位置以最大化收集数据。将我们的PSO方案的性能与顺序算法,贪婪算法和基于TSP问题的解决进行比较,仿真表明,我们的基于PSO的解决方案比其他算法要好得多。未来,我们将研究如何部署多个AV,如何为大规模数据收集设计实用的合作机制,以及研究丢包的影响,并在这些情况下从网络编码中获得收益。未来的工作还将考虑具有不同优先级的数据的情况。如果在每个传感器集群中存在关键数据的概念,那么在算法中可以采用各种方法来保证关键数据的恢复,从访问每个群集时首先卸载关键数据,在路径规划过程中为关键数据包提供不同的权重,以便AV有能力在访问每个群集有足够的时间收集关键数据包。
参考文献
[1] R. Ahlswede, N. Cai, S. Y. Li, and R. Yeung, “Network information flow,” IEEE Trans. Inf. Theory, vol 46, no 4, pp. 12041216, Jul. 2000.
[2] D. Munaretto, J. Widmer, M. Rossi, and M. Zorzi, “Resilient coding algorithms for sensor network data persistence,” In Procs of the 5th European Conf. on Wireless sensor networks (EWSN), Springer-Verlag,pp. 156-170, Bologna, Italy, Jan. 2008
[3] D. Leong, A. G. Dimakis, and T. Ho, “Symmetric Allocations for Distributed Storage,” In Proc. IEEE Global Telecomm. Conf. (GLOBECOM),pp.1-6, Hawaii, USA, Dec. 2010
[4] D. Leong, A. G. Dimakis, and T. Ho, “Distributed Storage Allocation for High Reliability,” In Proc. IEEE Int. Conf. On Comm. (ICC), pp.1-6, Cape Town, South Africa, May 2010
[5] J.N. Tsitsiklis, lsquo;Efficient algorithms for globally optimal trajectories,”IEEE Trans. Autom. Contr., vol. 40, no. 9, pp. 1528-1538, Sep. 1995
[6] J. J. Enright, K. Savla, E. Frazzoli, and F. Bullo, “Stochastic and Dynamic Routing Problems for Multiple UAVs,” AIAA Journal of Guidance, Control and Dynamics, Vol. 32, No. 4, pp. 1152-1166, 2009.
[7] S. Rathinam, and R. Sengupta, “Lower and Upper Bounds for a Multiple Depot UAV Routing Problem,” In Proc. 45th IEEE Conf. on Decision and Control, pp. 5287-5292, San Diego, USA, Dec. 2006
[8] M Lindhacute;e, and K H Johansson, “Communication-Aware Trajectory Tracking,” IEEE Int. Conf. on Robotics and Automati
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[23649],资料为PDF文档或Word文档,PDF文档可免费转换为Word
您可能感兴趣的文章
- 饮用水微生物群:一个全面的时空研究,以监测巴黎供水系统的水质外文翻译资料
- 步进电机控制和摩擦模型对复杂机械系统精确定位的影响外文翻译资料
- 具有温湿度控制的开式阴极PEM燃料电池性能的提升外文翻译资料
- 警报定时系统对驾驶员行为的影响:调查驾驶员信任的差异以及根据警报定时对警报的响应外文翻译资料
- 门禁系统的零知识认证解决方案外文翻译资料
- 车辆废气及室外环境中悬浮微粒中有机磷的含量—-个案研究外文翻译资料
- ZigBee协议对城市风力涡轮机的无线监控: 支持应用软件和传感器模块外文翻译资料
- ZigBee系统在医疗保健中提供位置信息和传感器数据传输的方案外文翻译资料
- 基于PLC的模糊控制器在污水处理系统中的应用外文翻译资料
- 光伏并联最大功率点跟踪系统独立应用程序外文翻译资料


