
英语原文共 4 页,剩余内容已隐藏,支付完成后下载完整资料
中国车牌识别系统
双伟
中国北方大学理学院
山西省太原市雪园路3号030051
shuangwei171@126.com
白燕平,
中国北方大学理学院
山西省太原市雪园路3号030051
baiyp@nuc.edu.cn
摘要:作为研究现代交通工程的重点和热点问题之一,车牌识别(LPR)引起了越来越多的关注。在本文中,提出一种对于中国车牌样式的LRP实验。该试验包括四个阶段:车牌定位,图像预处理,字符分割和字符识别。这对解决无关的汉字,字符的粘连,光照变化,噪声干扰和空间标记等问题是有效的。
关键词:车牌识别,车牌定位,字符分割,字符识别,人工神经网络
I.引言
车牌识别(LPR)在交通执法中起着重要的作用,如交通执法[1]、实时监视停车[2]、道路监视和安全等。从自然图像中识别汽车牌照是一个复杂的过程,涉及到车牌的检测和车牌字符的识别,许多技术在一些论文中已经被涉及[3,4]。然而,这些技术研究中国车牌识别是可行的。在本文中,提出了一个对于中国样式车牌的车牌识别实验,是基于颜色特征和纹理特征的车牌定位。该系统包括四个阶段,车牌定位,图像预处理,字符分割和字符识别。分别描述如下:
车牌定位:从复杂场景中提取车牌候选区域。采用基于颜色特征和纹理特征的车牌定位方法。首先将彩色图像由RGB空间变为HSI空间。利用颜色度和饱和度值实现车牌的粗略定位。最后,根据黑白跳变的车牌图像的高频特性,实现了车牌的精确定位。
图像预处理:车牌图片丰富多彩。如果彩色图片直接处理,会降低处理速度。因此,车牌颜色信息应处理得到灰度图片。事实上,由于牌照的侧框和上下铆钉会干扰识别车牌,我们将拆卸牌照的侧架和低铆钉。
字符分割:使用改进的水平投影分割,然后分割字符缩放。这种方法对解决无关的汉字,字符的粘连,光照变化,噪声干扰和空间标记等问题是有效的。
字符识别:提出了改进的BP神经网络用于车牌字符识别。神经网络的训练向量由256个元素组成。它可以创建由图像字符的图像行的二进制格式的车牌。
本文的其余部分组织如下:第2节讨论了系统的体系结构,并详细说明了每一个步骤,第3节显示的实验结果,并对结果得出评论。
II.系统的实现
A、车牌定位
- 车牌区域颜色模型的修正
采用基于颜色特征和纹理特征的车牌定位方法。要从图像中提取车牌,应准确掌握车牌的主要特征。一个24位BMP图像的像素需要在内存中的三字节,其中包含红色,绿色,蓝色的颜色信息。我们得到的图像从普通计算机使用RGB模型描述。在这个模型中,我们使用红色,绿色和蓝色的值来显示每一个颜色。但这种照明影响模型。因此,我们将RGB模型转化为HSI模型,得到了不同光照条件下的车牌颜色信息,并利用色相、饱和度和亮度。色调标志着每一种纯色的特征,饱和度是测量纯白色被白色光稀释的程度,灰度表示图像灰度值[8]。RGB模型转化为HSI模型如下:
(1)
(2)
(3)
蓝度约为240°,饱和度的S值较大。根据车牌的特点,我们可以粗略地定位蓝白车牌。我们举一个例子,蓝色的汽车和蓝板和白色的特点显示如图1。图1是RGB图像。首先,我们将RGB图像转换成HSI图像。然后,我们考虑的H和S的值过滤的蓝色范围的汽车,结果如图2所示。
图1 原始图像
图2 滤波后的图像
2)车牌的精确定位
车牌的纹理主要是车牌字符的轮廓。显然,一个边缘是由一组连接的像素,这些取决于灰色区域打破。因此,我们通常使用导数来检测图像中的边缘像素。其实有很多方法的边缘检测,处理图像通常含有太多的信息,我们需要或不需要,同时表现出更好的抑制图像噪声,所以我们使用Canny滤波器处理[8]。图3为Canny算子滤波图像。
图3 Canny算子滤波的边缘图像
Canny算子滤波的图像是二值图像。根据图中我们可以看到车牌区域拥有比其他地区更多的边缘信息的图像。这是由于字符和车牌的差异比较大。车牌区域字符按一定间隔排列。字符具有一定宽度。字符和车牌的颜色比较单一。因此,我们可以使用这种特性来定位车牌区域的线性扫描算法。线性扫描算法如下:
1、扫描图像的每一水平线;
2、获取黑白像素每行变化时间的值;
3、上下扫描从线上的像素的变化值大于其他行;
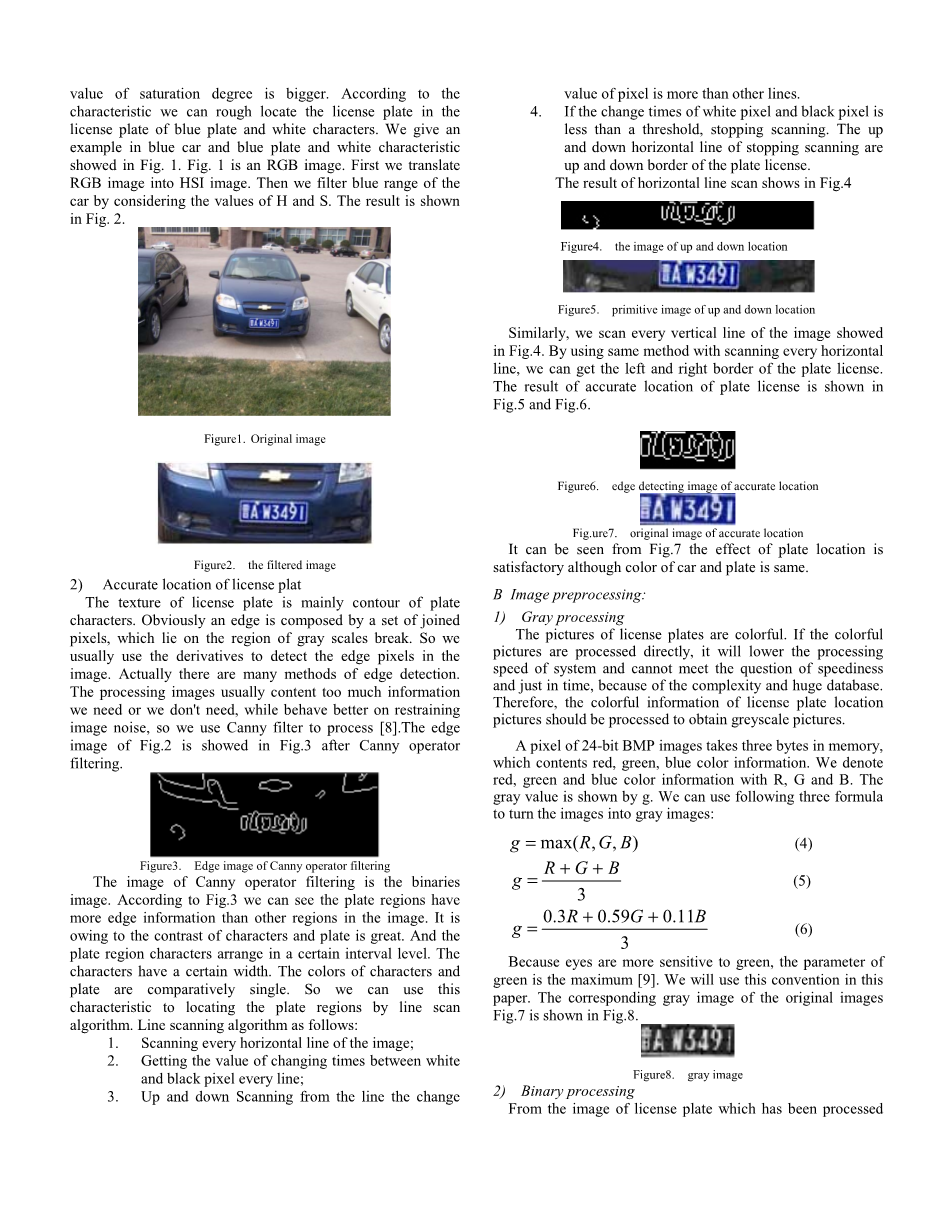
4、如果白色像素和黑色像素的变化时间小于阈值,停止扫描。限幅扫描的上下水平线为车牌的上下边界。水平线扫描显示如图4。
图4 上下位置图像
图5 上下位置的原始图像
同样,我们扫描图4显示的图像的每一个垂直线。用同一方法扫描每一水平线,即可得到车牌的左右边界。对车牌定位准确的结果是在图5和图6所示。
图6 精确定位边缘检测图像
图7 精确定位原始图像
可以看出,从图7车牌定位的效果是令人满意的,虽然车牌的颜色是相同的。
B、图像预处理:
- 灰度处理
车牌图片丰富多彩。如果将彩色图片进行直接处理,会因系统的复杂性和庞大的数据库而降低系统的处理速度,不能满足快速、及时的问题。因此,车牌定位图片丰富多彩的信息应该得到灰度图片。
一个24位BMP图像的像素需要在内存中的三字节,其中包含红色,绿色,蓝色的颜色信息。我们用R,G和B表示红色,绿色和蓝色的颜色信息。灰度值由g表示。我们可以使用下面的三个公式将图像转化为灰度图像:
(4)
(5)
(6)
因为眼睛对绿色更敏感,绿色的参数是最大值[9]。我们将在本文中使用这种惯例。原始图像相应的灰度图如图8所示。
图8 灰度图像
- 二进制处理
从经过边缘检测处理的车牌图像中可以看出,提取的边缘灰度比其他区域的灰度高。为了简化后续处理,我们通常的图像进行二值变换。经典的Otsu方法是常用于车牌位置二值化的简单算法。因此,我们使用Otsu方法获得二值图像。二值图像相应的灰度图如图9所示。
图9 二进制图像
- 清除侧架和上低铆钉的车牌
在车牌的低边架上有四个铆钉。事实上,因为侧框和低铆钉的车牌会干扰车牌的识别。在这个阶段,我们将删除车牌的侧架和低铆钉。由于边框上的白色和黑色像素的变化时间小于牌照字符。根据这一特点,我们可以擦拭侧架和低铆钉。图10是修改后去除边框和铆钉的车牌图像。
图10 二值图像抹去侧框和铆钉
C、字符分割
造成字符分割困难的因素有很多,如图像噪声、板框、铆钉、空间标记、光照方差等。我们的算法是改进的水平投影,克服了上面提到的困难。这对解决无关的汉字,字符的粘连,光照变化,噪声干扰和空间标记等问题是有效的。为了分割个别字符,我们使用灰度值垂直投影车牌图像。然后我们引入阈值分割。
改进的水平投影如下:
从左到右扫描预处理图像,记录白色像素(字符的像素为白色);
在中国车牌中,第一个字母是汉字。根据汉字的特点,我们设置了两个阈值来切分第一个汉字。我们从左到右扫描预处理图像。当第一个垂直线的白色像素值大于第一阈值,垂直线是从汉字的位置,然后继续扫描,当垂直线白色像素值小于第一阈值,我们比较两垂直线之间的宽度与第二阈值。如果宽度小于第二个阈值,继续扫描直到找到垂直线,两条垂直线之间的宽度大于第二阈值。竖线是汉字的结束位置。该方法有效地解决了一些无关的汉字问题。
车牌的第二到第七个字符是英文字母和数字。这里没有无关的问题。所以我们只使用第一个阈值来分割。当第一个汉字是段,我们继续扫描。当垂直线的白色像素值大于第一个阈值时,垂直线是下一个字母的起始位置。当下一垂直线的白色像素值小于第一阈值时,垂直线是字母的结束位置。直到所有字母和数字被分割。
下面两幅图是给出两个分割的例子
图11 车牌定位原始图像
图12 分割图像
不同车辆板块分割的字符大小不同。线性化算法应用于输入图像调整到一个统一的尺寸(在我们的实现中,16times;16像素)。
D、字符识别
到目前为止,还有一些使用矢量量化,模板匹配和神经网络等车牌识别技术[5,6,7]。一般来说,BP算法包括前向过程和后向过程。BP神经网络包含输入、隐层神经元和输出层神经元。每个中间层的输出是下一层的输入。字符(16x16像素)的图像构成的神经网络的训练集。BP神经网络用于字符识别。神经网络的训练向量由256个元素组成。它可以由二进制格式的车牌字符的图像行的向量创建。该算法可以参[10]。
III. 实验结果与结论
该系统用MATLAB实现。以下数字显示实施过程。
图13 车牌定位结果
图14 车牌预处理结果
图15 字符分割的结果
图16 字符识别结果
在本文中,260个图像用于实验。所有这些都是由CCD相机从不同的场景和现实世界的不同条件下,包括不同的角度,不同的照明条件。结果表明,车牌的平均时速为3m/s时,字符的成功检出率高达76%。由于字符识别对斜板敏感。因此,倾斜检测影响车牌识别率。如果车牌图像的实验没有偏差,识别率将得到提高。从实验结果可以看出,提出的方法是可靠的。但实验中仍然有一些图像无法检测到(尤其是倾斜图像)。我们将通过偏差校正来提高算法的性能从而改善车牌识别率。
Ⅳ.参考文献
[1] Maged M. M. Fahmy, 自动车牌识别的神经网络方法. 车辆导航与信息会议论文集. 1994.9, 99-101.
[2] Kato, T., Ninomiya, Y., Masaki, I. 基于样本图像学习的车辆前识别. 智能交通系统, IEEE 3(4). 2000, 252–260.
[3] Otto Fucik, Pavel Zemcik, Pavel Tupec, Ludek Crha, Adam Herout . 网络图片执行和部署步骤的交通监控系统包括: UNICAM. 第一届IEEE计算机系统工程国际会议论文集. 2004.
[4] Steve Connor, 英国将成为第一个国家监测每一个汽车旅程. 2005. 12. 22.
[5] Jian-Feng Xu, Shao-Fa Li and Mian-Shui Yu, 基于颜色和边缘信息的车牌提取, 机器学习与控制论. 国际会议论文集(6), 2004. 8. 26-29, 3904-3907.
[6] S.L. Chang, L.S. Chen, Y.C. Chung and S.W. Chen, 自动车牌识别. 智能交通系统, IEEE(5). 2004, 42-53.
[7] Jianfeng Xu, Zhibin Chen, and Shaofa Li, 中国车牌识别色彩分析, RISSP. 2003, 1312-1216
[8] Rafael C. Gonzalez. 数字图像处理(第二版). 电子工业出版社, 2003.
[9] Cheng Zhang, Guangmin Sun, Deming Chen, Tianxue Zhao. 基于字符连接和投影特征的车牌快速定位方法. 第二次工业电子与应用会议. 2007, 2545-2549.
[10] Yanping Bai, Zhen Jin,2005,基于在线预测的BP神经网络在线预测SARS疫情方法. 孤波和分形(26), 2005, 559-569.
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[25810],资料为PDF文档或Word文档,PDF文档可免费转换为Word
您可能感兴趣的文章
- 饮用水微生物群:一个全面的时空研究,以监测巴黎供水系统的水质外文翻译资料
- 步进电机控制和摩擦模型对复杂机械系统精确定位的影响外文翻译资料
- 具有温湿度控制的开式阴极PEM燃料电池性能的提升外文翻译资料
- 警报定时系统对驾驶员行为的影响:调查驾驶员信任的差异以及根据警报定时对警报的响应外文翻译资料
- 门禁系统的零知识认证解决方案外文翻译资料
- 车辆废气及室外环境中悬浮微粒中有机磷的含量—-个案研究外文翻译资料
- ZigBee协议对城市风力涡轮机的无线监控: 支持应用软件和传感器模块外文翻译资料
- ZigBee系统在医疗保健中提供位置信息和传感器数据传输的方案外文翻译资料
- 基于PLC的模糊控制器在污水处理系统中的应用外文翻译资料
- 光伏并联最大功率点跟踪系统独立应用程序外文翻译资料


