
英语原文共 7 页,剩余内容已隐藏,支付完成后下载完整资料
使用网络原理和仪器概念的车辆自动速度监视系统
翻译后摘要:本文的主要目的是提供一个无风险的旅程的车辆司机和行人通过控制使用无线电频率信号的车辆的速度。为了更清楚,本文主要是为了防止人们违反政府的法律和规则,迫使车辆行驶在指定的速度。本文结合无线网络的概念和仪表控制工程。使用无线电频率以确保所有车辆使用这种方法控制。微控制器用于比较电机的设定点和实际转速。该标志牌作为无线电频率发射机和车辆作为接收器。设置点(累加器)被分配给放置在车辆内的微控制器,并且将车辆的当前速度作为实际值(基址寄存器)分配给微控制器.。这个程序的逻辑是,如果当前值超过设定点,那么车辆的速度将自动控制与电机驱动器的帮助下。一种液晶显示器,用于在接收无线电频率之前和之后显示电机的旋转数。而不是编码每个符号板发出特定的射频信号,一个服务器被放置发送无线电频率的标志板。因此,标志牌充当发射器和接收器。服务器以这样一种方式编码,它能够在特定频率广播无线电频率。
关键词:PID控制器、液晶显示器、射频发射机和接收机、电机驱动器、服务器、ECU、调速器。
一、引言
根据最近的一项调查,发生的主要事故是由于开车鲁莽和超速行驶。即使政府提供严格的规章制度,死亡率也没有降低.。为了给这个问题提供一个满意的解决方案,本文建立。
·整个控制操作无人机界面的帮助。
·在LCD的帮助下,如果速度限制超过设定点,以提醒驾驶员超速驾驶。
·降低死亡率,确保政府规章不被打破。
在这个项目中,车辆的速度控制的帮助下,人机界面。借助无线网络概念,信号从标志板传输到车辆。
当车辆进入发射机放置区域时,车辆的速度得到控制,车辆以特定的速度被强制行驶。在这个区域,即使车辆加速,它也不能超出规定的速度范围.。当车辆离开该区域时,它可以自由地以期望的速度加速。
由于本项目没有人机界面,所以没有人为错误,如计算。系统的整体效率是增加的速度自动控制只在所需的地方和其他地方的车辆可以在自己的速度驱动。由于车辆仅控制在所需的地方,闭环控制被创建。
每个地方都有标志牌,直接影响成本估算.。为了提高效率和最佳的成本,一个服务器被引入。此服务器编程的方式,它确实做的射频发射器的工作。标志板是作为发射器和接收器。他们接受来自服务器的信号,并再次发送到目前在该特定区域的车辆。简单地说,标志牌充当反射器.。它只是反映了从服务器到车辆的信号。他们不是把所有的信号板转换成无线电频率发射器,而是作为无线电波的反射器.。这种创新的方法转换成一个发射器和接收器的符号板大大帮助我们减少花费的钱。
当车辆接近学校区、医院区或任何特定地点时,车辆的速度会自动控制,则该地区并不需要有自动变速器.。因此,这个项目阻止人们打破政府的法律,以及它帮助政府经济通过降低成本沉浸在建设速度断路器。
使用无线电波控制车辆的速度的主要原因是它可以旅行更长的距离相比,红外信号。无线电波的信号强度非常高的时候,有很多的车辆,在一个特定区域的无线电波,确保每辆车的速度‟在那个特定的地点是在一个有效的方法控制的现状。
二、框图
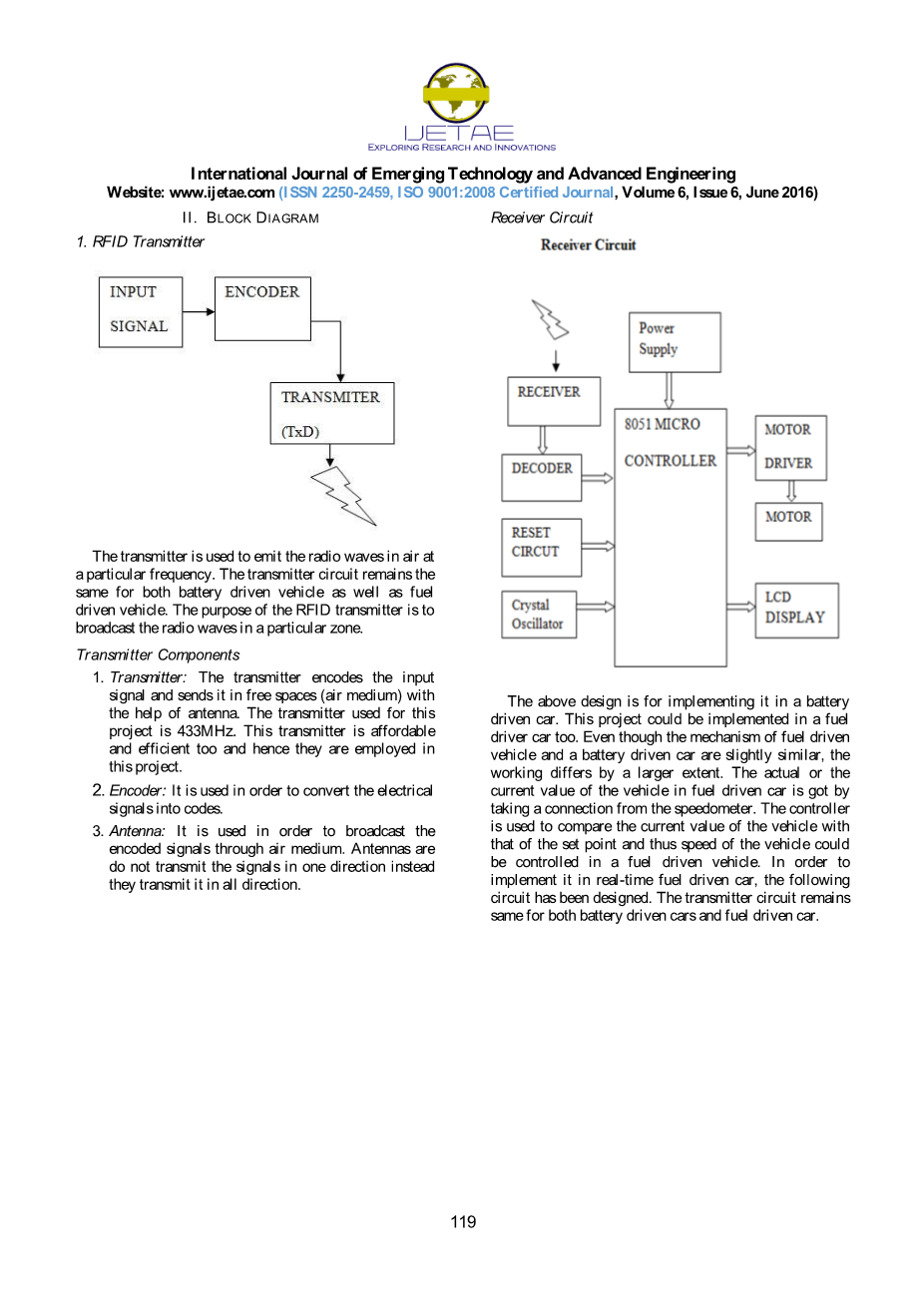
1·RFID发射机
发射机用来在特定的频率发射空气中的无线电波.。发射器电路保持相同的两个电池驱动的车辆以及燃料驱动的车辆。RFID发射机的目的是在特定区域广播无线电波。
发射机组件
1. 发射机:发射机对输入信号进行编码,并在天线的帮助下将其发送到自由空间(空气介质)。本工程采用433MHz的发射机。这个发射器是负担得起的和高效的,因此他们受雇于这个项目。
2. 编码器:用于将电信号转换为编码。
3. 天线:用于通过空气介质广播编码信号。天线不是以一个方向发射信号,而是向各个方向发射信号。
接收电路
上述设计是为实现在电池驱动的汽车。这个项目也可以在燃油驱动车中实现。即使燃料驱动的车辆和电池驱动的汽车的机制略有相似,工作在很大程度上不同。实际或燃料驱动的汽车车辆的当前值被从车速表以连接。该控制器用于比较车辆的当前值与设定点,从而可以控制车辆的速度,在燃料驱动的车辆。为了实现在实时燃料驱动的汽车,下面的电路已被设计。发射器电路保持相同的电池驱动的汽车和燃料驱动的汽车。
接收器组件:
4. 接收机:接收机检测到传输和解码以饲料为PID控制器的信号。
5. PID控制器:从接收器的值被分配作为PID控制器的设定点。车辆的当前速度是给定的PID控制器的实际值。
6. 发动机控制单元ECU。它通常被称为大脑的车辆。如果车辆的速度超过该地区的车速限制,则将此指令发送给调速器。
7. 调速器:为了控制电机转速,使用调速器。
三、工作模块
·发射机以这样一种方式进行编码,它以与电机的转速成正比的频率发射无线电波。
·发射机发出的无线电波,在每一个特定的时间间隔;说5到10微秒,这无线电波围持续几范围取决于使用的发射机的类型。
·无线电频率波,然后接收到的接收器被解码,然后送入PID控制器。该解码值作为控制器的设定值.。电机的实际速度是从速度和它作为控制器的电流值。
·在控制器中编码的逻辑是,当车辆的速度大于PID控制器的设定点,那么速度是通过发动机控制单元的调速器的帮助下控制。
·调速器负责车辆的加速和减速.。如果车辆减速,则在调速器的帮助下使用制动器。
·这种速度控制仅适用于某一特定区域,一旦车辆越过某一特定区域,车辆上的速度屏障就会被关闭,车辆可以以更快的速度行驶。
·液晶显示是为了表明谁是驾驶车辆的超速,驾驶员可以更好地控制车辆,从而证明了该方法在控制车辆的速度会有效。
四、流程图
发射机:
第1步:输入信号送入射频发射机。
第2步:这个信号在编码器的帮助下转换成代码。
第3步:在发射机的帮助下,信号被发送出去.。天线的主要目的是广播在某一特定区域传播的信号。
第5步:如果实际转速低于设定值,则调速器不动作。循环终止。
第6步:循环迭代,直到车辆的速度等于或低于PID控制器的指定设定点。
五、模拟
接收射频信号之前
电机转速在接收信号前转速
接收射频信号后
电机转速在收到信号后转速
六、应用范围
而不是使每个标志板作为一个无线电频率发射器,我们正在分配一个服务器,它能够发射无线电波在特定的频率。这个无线电波频率与区域的速度极限成正比。
使用这种方法的主要优点是:
·如果学校/医院关闭或从一个地方转移到另一个地方,而不是删除所有的符号板,服务器可以关闭该特定区域。
·将所有标志板在一个区变成一个射频发射机的成本太高,这种方法是不可行的。相反,我们可以使用服务器来传输无线电波,这大大降低了整体安装的成本。
整个项目是轿车、客车、货车等车辆,不喜欢警察车和救护车。这个接收器电路不放在救护车,因此救护车可以以更高的速度驱动,即使在这些区域。
这个项目也可以用来管理交通拥挤的地区。最近的调查已经证明,事故率较高,因为车辆数量的增加,因此交通管理拥有一个至关重要的关键。这包括大数据分析的概念。数据流到每天24小时,因此1TB数据接收每天的系统。
技术成果:
·增强大数据存储能力。Apache Hadoop提供了一个具有高容错性和吞吐量的海量数据存储解决方案,允许大量信息和无缝扩展能力的可靠存储。
·实现了强大的I/O处理功能。英特尔至强处理器E5系列提高I/O处理。现在一个服务器可以以每秒250次的平均速度500kb画面同步传输,或异步并行存储的2000倍。
商业价值:
·改进的交通情况检测能力。24个月的交通违法行为图像信息存储在系统中,交警部门可以轻松的获取车辆‟信息如颜色、模型,以及车牌实时与其他重要的相关信息,如历史行为,行车路线,司机的身份。
·改进交警对机动车辆的监管。交通警察可以很容易地检索车牌号码和行驶轨迹的过往车辆从超过24亿记录在系统中。
·容易获得相关的车辆分析数据。调查交通案件,需要复杂的查询,如从多个检查站或多个车辆的数据,现在只需10秒。
大数据挑战
作为业务数据不断增长,月平均数据已经达到10百万兆字节。由于图片和视频等数据存储在不同的数据中心在不同的部门,它已成为难以使用。此外,一些交通管理设施,设备和应用系统运行在筒仓,需要整合。全市交通数据保持12个月。但历史数据显示,交通数据每年增长百分之60,迫使存储数据的持续时间变得越来越短。城市需要延长交通数据的存储时间,以支持公安人员,刑事调查小组,经济调查和前线警察。车辆交通数据往往是关键的证据,有助于确定个人参与法律案件。随着城市的不断发展,交通监控业务规模也越来越大。通过监测设备采集的数据需要可靠的存储。同时,随着新技术的发展和电子警察检查站系统对高清视频图像的升级,图像规模比以前大,要求更好的存储性能。
七、结果
因此,车辆的速度以有效的方式控制,并且以成本有效的方式。
该项目可在学校区、医院区、丘陵区、事故区、行人过街等地区实施。这种创新的技术主要是在降低死亡率的动机,在事故中丢失。这个项目为长期存在的问题创造了一个满意的解决方案。所有车辆的成本,品牌可以控制使用这个项目。
八、结论
本课题对车辆的无线自动速度控制进行了研究和实现。我的未来工作包括嵌入道路状况的检测,交通感应和自动救护车警报在紧急情况下在上述解释项目。
参考文献:
[ 1 ]国际期刊在计算机与通信工程1卷,先进的研究问题8,十月2012。
[ 2 ]国际新兴技术和先进的工程(ISSN 2250-2459)4卷,3期,2014三月。
[ 3 ] M. K,telaprolu,Sarma,v.v.ratankanth,e.k.rao,锡,Banda,汽车电子与安全国际会议(ICVEs),浦那(2009)。
[ 4 ] Gangadhar,S.;R N蒂所技术、智能交通控制系统,IEEE会议出版,kahargpur(2010)。
[ 5 ]伯恩特,Don,实时嵌入式技术与应用会议(RTA),IEEE教育与学习(2005)。
[ 6 ] Kassem,微软,Redmond,瓦城,美国kosba,A.E.;Yousuf,M.;VRF的车辆检测和测速车载技术会议(VTC弹簧),IEEE(2012)。
[ 7 ] Papamarkos:bdquo;色彩还原,利用局部特征和SOFM神经网络‟,int J.成像系统。技术,1999,10,(5),页404–409
[ 8 ] Heckbert,P.:帧缓冲显示‟彩色图像bdquo;量化、计算。图1982,16,(3),页297–3073阿什,即:bdquo;八叉树颜色量化‟,在程序员的角度bdquo;辐射‟‟(John Wiley,1994)
[ 9 ]湾,S.J.,Prusinkiewicz,P. Wong,s.k.m.:基于bdquo;方差帧缓冲显示‟彩色图像量化、颜色。研究应用,1990,15,52页–58
[ 10 ] Balasubramanian,R.,Allebach,bdquo;-一种新的方法来选择颜色的调色板图像‟,J.影像技术,1990,17,284页–290
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[25276],资料为PDF文档或Word文档,PDF文档可免费转换为Word
您可能感兴趣的文章
- 饮用水微生物群:一个全面的时空研究,以监测巴黎供水系统的水质外文翻译资料
- 步进电机控制和摩擦模型对复杂机械系统精确定位的影响外文翻译资料
- 具有温湿度控制的开式阴极PEM燃料电池性能的提升外文翻译资料
- 警报定时系统对驾驶员行为的影响:调查驾驶员信任的差异以及根据警报定时对警报的响应外文翻译资料
- 门禁系统的零知识认证解决方案外文翻译资料
- 车辆废气及室外环境中悬浮微粒中有机磷的含量—-个案研究外文翻译资料
- ZigBee协议对城市风力涡轮机的无线监控: 支持应用软件和传感器模块外文翻译资料
- ZigBee系统在医疗保健中提供位置信息和传感器数据传输的方案外文翻译资料
- 基于PLC的模糊控制器在污水处理系统中的应用外文翻译资料
- 光伏并联最大功率点跟踪系统独立应用程序外文翻译资料


