
英语原文共 10 页,剩余内容已隐藏,支付完成后下载完整资料
模糊PID控制器的硬件实现
摘要:对于传统的硬件实现模糊PID控制器来说,它在大计算方面表现优秀,但是在实时性能方面表现不良,因此,可以通过模糊系统进行调整增益参数的PID控制算法就被选作研究对象,这也被认为是硬件实现的一个新的方式。在本文中,作者提出用硬件网络的存储器地址映射来实现模糊PID控制算法,并设计了相应的硬件系统。这个想法的实现了硬件和智能算法的融合,有效地简化硬件电路,整个控制器由于没有CPU,实现非常简单。同时,这是非常容易使用,只连接传感器/换能器,驱动器和致动器即可。控制器是反应速度很快,它只需要两个A / D转换时期所需要的控制信号输出。因此,可以有效地满足实时性能。
关键字:模糊;PID;存储器地址映射
1.介绍
在许多工业过程控制系统中,控制过程机制复杂,所需时间不同,所以一般PID控制很难获得令人满意的要求,因为它在面对许多不同的因素和各种各样的干扰时并不会自适应变化。虽然这些因素在超过界限时,性能会明显恶化,甚至超过公差。为了避免常规PID控制器的缺点,改善其性能,据文档记载,(Astrom amp; Hagglund,1989)和(Hoopes, Hawk amp; Lewis, 1983)提出了自适应PID控制器,这种方法实际上是与一般自调整控制器相同。认识到在线的控制模型,然后基于公认的模型来调节PID增益参数。这种方法并没有改变一般的PID控制器调谐参数依赖于模型这一事实,识别在线过程模型是非常必要的,因此,计算量是非常大的。Zhao 和 Tomizuka提出PID的模糊增益调度方法(Zhao, Tomizuka amp; Isaka, 1993),其模糊规则和推理在线上被利用,以确定基于所述误差信号和所述控制器参数的一阶倒数。增益PID控制器的规则一般来自于熟练的“经验法则”操纵。这些规则被融入模糊系统来及时调整PID增益。在错误的离散空间,错误和输出控制信号的变化,通过的Kp,Ki和Kd值计算模糊系统中所有可能的输出的控制值,以这种方式,可以通过二维查找表得到。增益参数可以通过这些查找表在线来调节,计算已大大减少。但是,它仍然需要编写大量工业控制计算机或微控制硬件实现方案单位,在改善实时性能不是很明显。因此,在(Zhao, Tomizuka amp; Isaka, 1993)的论文中模糊PID控制算法被选定为学习的例子。在本文中,作者提出的内存地址映射的硬件网络来实现模糊PID控制算法,并设计了相应的硬件系统和详细的实施电路。
2. 基于内存地址映射函数表示
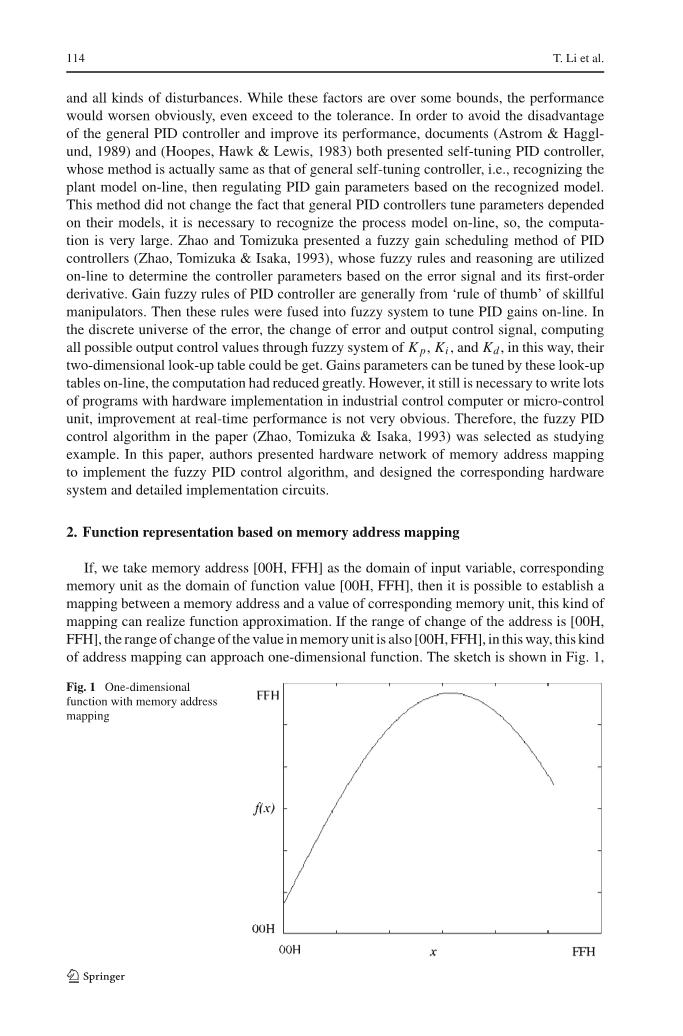
如果我们把内存地址[00H, FFH]作为输入变量的域,相应内存单元的域函数值[00H, FFH],然后可以建立一个内存地址和值之间的映射对应的内存单元,这种的映射可以实现函数逼近。如果改变地址的范围是[00H, FFH],值的变化范围在内存单元也为[00H, FFH],这种地址映射接近于一维函数。如图1所示,
图1一维函数与内存地址映射
图2二维函数与内存地址映射
图3串行地址映射
存储器地址表示变量x,在对应存储器单元中的函数值可以由函数f(x)表示。对于一维函数,它实际上是一个映射,即R→R,一维存储器地址映射类似于[00H,FFH]→[00H,FFH],但实际上仍有一些差别,因为输入和输出在内存地址映射空间都是离散的。
一般来说,内存地址是多位的,我们也把它分为高位地址和地位地址或页面地址和页面内部地址。如果我们在同一时间访问高位地址和低位地址执行存储器地址映射,这种映射接近二维函数,如图2。对于二维函数,它实际上是一个映射,即R2→ R,二维内存地址映射类似于[00H,FFH]2→[00H,FFH]。
对于三维或更多维的函数,我们可以应用复合函数方法。例如,函数,以及,,复杂的功能可以通过多种串行存储器地址映射接洽,如图3所示。首先,变量u和v二者分别存取存储器1的高位和低位地址,输出函数值x,同时,变量w和z都访问存储器2,并输出函数值y。然后取x和y为存储器3输入变量,内存地址映射输出函数值J。任何映射Rn→Rm,如果它可以被分成很多映射Rn→R,和每一个映射Rn→R也可以被分成很多映射R2→R和R→R,然后映射Rn→Rm通过内存地址映射网络实现。
3.PID控制器的模糊增益调度
Zhao, Tomizuka 和 Isaka, (1993)
PID控制器的传递函数具有以下形式:
(1)
其中Kp,Ki,和Kd分别为比例,积分,微分增益。PID控制器的另一种有用的等价形式是
(2)
其中Ti= Kp/Ki和Td=的Kd/Kp。Ti和Td分别被称为积分和微分时间常数。
本文中PID控制的离散时间等价表达式为
(3)
这里,U(k)是控制信号e(k)的基准和过程输出之间的误差,Ts为控制器的采样周期,且e(k)e(k)-e(kminus;1)
PID控制器的的Kp,Ki和Kd值或Kp,Ti,和Td的参数可以被控制以从给定的过程产生各种响应曲线。查找控制器的优化调整,对于给定的过程是重要的。在继承的基础上,模糊规则的PID控制器的在线增益调度方案出台。
图4示出了具有模糊增益调度的PID控制系统。假定的Kp,Kd分别在设定范围[Kp最小,Kp最大]和[Kd最小,Kd最大]。为方便起见,通过下面的线性变化,Kp和Kd值被归一化到零和一之间。
(4)
(5)
图4 PID与模糊增益调度控制系统
积分时间常数参照微分时间常数确定的,即
(6)
并因此获得的积分增益
(7)
参数Kprsquo;,Kdrsquo;和 alpha;是由一组的模糊规则决定,即:
如果e(k)是Ai,e(k)是Bi,那么Kprsquo;就是Ci, Kdrsquo;就是Di,并且 (8)
在这里,Ai,Bi,Ci和Di都在相应的配套模糊集; 是一个常数。这些模糊集合为e(k)和的隶属函数示于图5.在该图中,N表示负,P阳性,Z0大约为零,S小,M介质,B大。从而NM代表负介质,PB为阳性大,等等。
模糊集词Ci和Di既可以是大的也可以是小的,其特征的隶属函数如图6所示。
模糊集也可能被视作一个模糊数,这个数具有单一性,如图7所示。例如,当小时,的值为2.在此图中,S表示小,MS表示中等小。M表示中等,B表示大。
在等式(8)中的模糊规则可以从操作人员的专业知识中提取,并从参考文献(Zhao, Tomizuka amp; Isaka, 1993)中得到详细信息。一组规则,如表1所示,可以是用于调整比例增益(Kp)。对于K和的调整规则分别在表2和表3中给出。在表格中,B表示大,S表示小。
图5 e(k) 和的隶属函数
图6 Kprsquo;和Kdrsquo;的隶属函数
图7 对于的单隶属函数
表格1 对Kprsquo;的模糊整定规则
表格2 对Kdrsquo;的模糊整定规则
表格3 对Kprsquo;的模糊整定规则
选择传统模糊推理法引擎,单点模糊化和中心平均模糊化,然后,,和可以由下列公式得出:
(9)
(10)
(11)
,是展示在图5的隶属函数。,和是展示在图6,7中的相应中心平均值。
4. 通过内存地址映射网络实现的模糊PID控制器
根据等式(4),(5),(7)和(9),(10),(11),我们可以得到在线自校正参数Kp,Kd和Ki。除此以外,在取值范围舍去e(k) 和,我们可以通过查表得到Kp,Kd和Ki。通过这种方式,显然可以简化复杂的计算。然而,简单的查找表的程序也非常大,有可能影响实时性能。在本节中,介绍了如何设计上述模糊基于内存地址映射网络上的PID控制器。
对于等式(3),可以用以下等式替换:
(12)
(13)
在等式(13)中,Kp函数关于e(k) 和,Kd函数也关于e(k) 和,Ts是常数,所以u pd(k)函数关于e(k) 和。除此以外,如果有e(k)和e(k-1)的信号,实际上就包括,因为= e(k)-e(k-1)。所以,Kp,Kd和 u pd(k)可以被转换成关于e(k)和e(k-1)函数。已知e(k)和e(k-1)时,我们可以通过公式(4),(5),(9)和(10)得到u pd(k)。
由存储器地址映射网络实现模糊PID控制器的方框图显示在图8。模拟信号的误差可以通过由减法器IC1的设定基准信号与反馈信号相比较得到的。在AD转换器之后,就可得到数字信号的误差,第(2K-1)次的误差信号e(2k-1)被锁存在锁存器1(IC3)里,第(2k)次的误差信号e(2k)被锁存在锁存器2(IC4)。采取e(2k-1)和e(2k)作为内存器1的地址,我们可以通过存储器地址映射来得到u pd。
在等式(7)中,Ki是关于Kp,Kd和alpha;的函数,其中Kp,Kd和alpha;都是e(k)和的函数,因此,Ki是关于e(k)和的二维函数或者是e(k)和e(k-1)的二维函数。类似于存储器1,我们也可以通过内存2的地址映射得到Ki。
在等式(14)中,可以通过地址映射在内存3和内存4实现Ki,和常数Ts来实施,内存4的输出值为ui。在内存5的地址映射对ui和u pd实现相对于加法运算,从这个方面来说,内存5的输出u(2k)是模糊PID控制器的数字控制信号,其中,2K表示输出一个控制信号需要两个A / D转换周期。在D/A转化之后,数字控制信号将会被转换成模拟控制信号(0–5V, 或者minus;5V – 5V), 然后输出到执行机构控制装置。
图8 基于内存地址映射网络的模糊PID控制器
对于整个控制器的操作,它被时间序列脉冲控制器控制,控制一个模数转换器和所有的翻转锁存器,所有的脉冲序列如图9所示。时序脉冲控制器其实很简单,只包括分频器和逆相电路,其详细电路实际上已经设计在左下角的图10,
图9 时序脉冲控制信号
图10 详细的实现电路
图10展示了整个模糊控制器的详细实施电路。这种硬件实现的设计
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[31861],资料为PDF文档或Word文档,PDF文档可免费转换为Word
您可能感兴趣的文章
- 饮用水微生物群:一个全面的时空研究,以监测巴黎供水系统的水质外文翻译资料
- 步进电机控制和摩擦模型对复杂机械系统精确定位的影响外文翻译资料
- 具有温湿度控制的开式阴极PEM燃料电池性能的提升外文翻译资料
- 警报定时系统对驾驶员行为的影响:调查驾驶员信任的差异以及根据警报定时对警报的响应外文翻译资料
- 门禁系统的零知识认证解决方案外文翻译资料
- 车辆废气及室外环境中悬浮微粒中有机磷的含量—-个案研究外文翻译资料
- ZigBee协议对城市风力涡轮机的无线监控: 支持应用软件和传感器模块外文翻译资料
- ZigBee系统在医疗保健中提供位置信息和传感器数据传输的方案外文翻译资料
- 基于PLC的模糊控制器在污水处理系统中的应用外文翻译资料
- 光伏并联最大功率点跟踪系统独立应用程序外文翻译资料


