英语原文共 9 页,剩余内容已隐藏,支付完成后下载完整资料
照明LED和无线自组网的混合定位系统设计技术
摘要:
为了克服传统定位技术估计误差大,成本高,服务范围有限等问题,我们提出了两种设计方法,这两种方法将能更准确、更方便地服务于采用可见光通信(VLC)和ad-hoc无线网络基础设施的混合定位系统。
第一种方法采用了无载波的、基于VLC的混合定位技术,适用于像低数据率的光纤传感、来自发射器的窄范围可见光接收和远程定位这样的应用程序。
第二种方法同样采用了基于VLC的混合定位技术,但使用了一个4 MHz载波,适用于高数据率的光纤传感、来自发射器的宽范围可见光接收和中距离定位这样的应用程序。
在有障碍物的室内环境中,观察者和目标之间的距离分别被定为远距77.314m和中距23.68m。本文中测试了两种方案的混合定位系统并对预估结果进行了分析。
关键词:混合定位,可见光通信,ZigBee Ad-Hoc无线网络,多跳传输
- 介绍
现有的定位技术采用基础的方法来确定一个对象的位置,如:使用的全球定位系统这一基本设施、使用蜂窝式的室外通信或基于无线局域网的室内通信设备。无线定位系统的定位方法包括超声波系统、红外系统和基于视频的定位方法系统,其中大部分需要改进估计精度,降低安装系统基础设施的成本,扩大定位服务区域,等等。因此,寻找一个新的能满足所有的要求的定位技术是有必要的。另一方面,作为环保型研究之一,为了设计出一种基于混合LED照明和无线技术的新服务,各个领域都在积极做可见光应用的研究。最近已经开始了以VLC为基础的、通过照明LED和室内无线网络定位寻找目标位置的研究。定位主要是在室内或室外环境中,将接收信号的参数值(例如,信号强度,方向,或到达时间)转换成目标位置与已知的参考点之间的距离。由于诸如位置估计误差,基础设施成本高,以及限制服务区的问题,用传统的技术实现起来通常是困难的。
在本文中,作为更新和扩展了前人研究成果的新版本,为了克服传统的定位问题,提高定位精度,扩展服务领域,我们提出了一种新的混合定位方法,提出并开发了两种环境友好型定位系统的设计技术。这些方法使用了混合VLC方案,这种方案具有极低的接收错误率并且支持ZigBee的无线Mesh网络。由于容量的扩充这些方法需要降低耗能、提供安全保障并且适用于大型服务区。
第一种定位方法是基于VLC的无载波技术,适用于像低数据率的光纤传感、来自发射器的窄范围可见光接收和远程定位这样的应用。例如,用于大商场中货物的跟踪和监视服务。第二种定位方法是基于VLC的带有4 MHz载波的技术,适用于高数据率的光纤传感、来自发射器的宽范围可见光接收和中距离定位这样的应用。例如,用于当地的广播服务或导航与视频终端。
在第一节中,我们讲述了传统定位方法所面临的挑战和基于LED定位研究的研究动机。在第二节中,我们提出了基于LED技术的混合定位方法,建立了在VL和无线网络信道环境下的信号模型和信号估计方法。在第三节中主要包括混合定位系统的结构,无载波和带有4MHz载波的VLC收发器结构,以及系统的运行。在第四节中,我们描述了本系统的电路设计和两种定位方式的算法。第五节为结论部分。
- 定位学与信号估计
传统的定位技术,如指纹识别和基于细胞的目标定位,是基于全球定位系统和蜂窝无线通信的无线定位。它们在地图上以一个目标体为参照物通过大致估计来确定物体的位置[ 2 ]。采用这种估计方法,信号在通过室内或室外的无线通信信道时受到影响将会带来估计错误。本文中,我们采用在VL和无线射频通信信道混合环境下的估计定位这一概念,从而减少附近无线信号引起的位置误差。
- 方法论
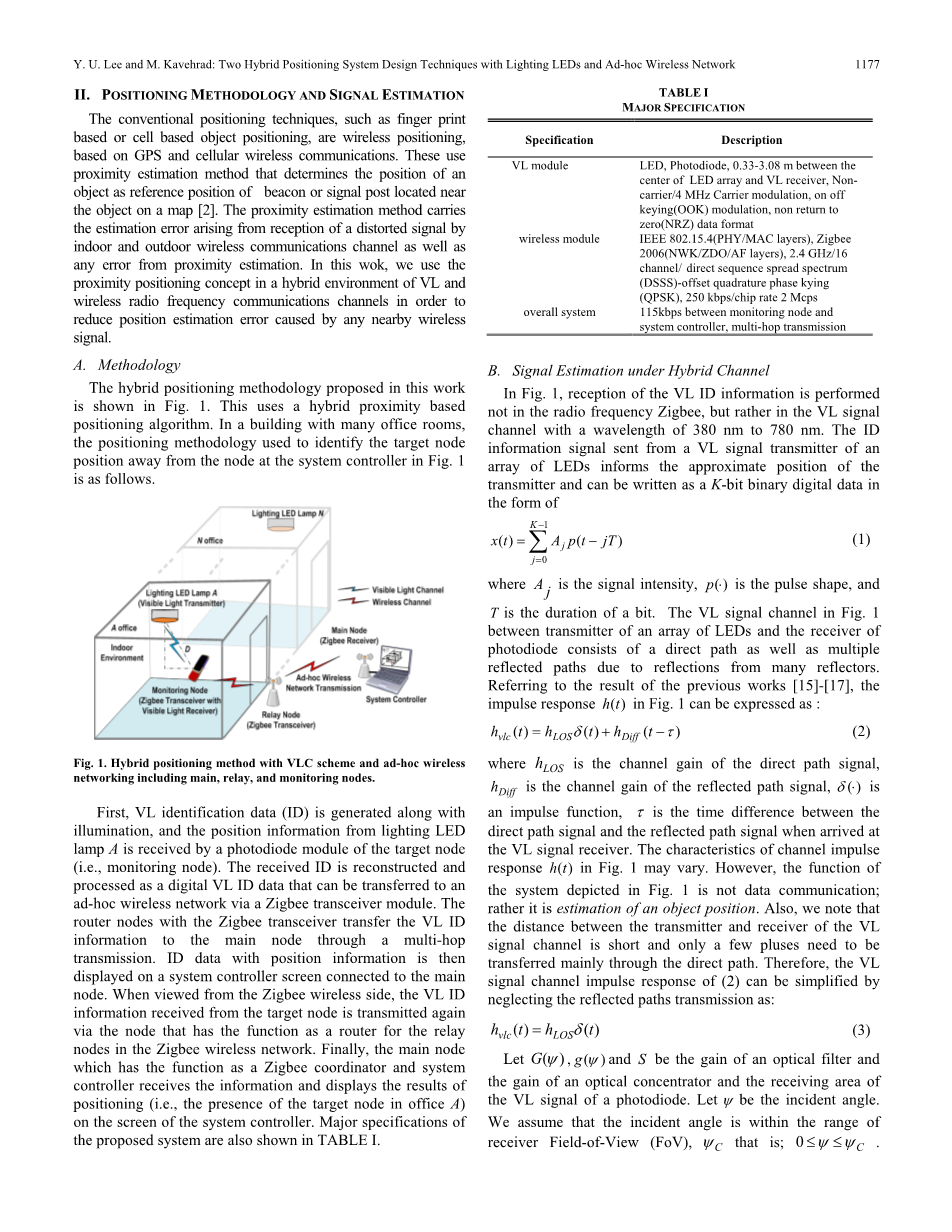
本文中提出的混合定位方法如图1所示。它采用了基于定位算法的混合估计。在有很多的办公房的建筑中,这种定位方法用于识别系统控制器中的目标节点位置,如下图所示。
图1
首先,VL识别数据(ID)是随着光照产生的,目标节点(即监测ODE)的光电二极管模块接收来自照明LED灯A的位置信息。接收到的ID改造为数字VL ID数据,这种数据可以通过ZigBee收发器模块传输到ad-hoc无线网络。带有ZigBee传输器的路由器节点通过多跳传输将VL ID信息转移到主节点。然后带有位置信息的ID数据就显示在一个连接到主节点的系统控制器屏幕上。从ZigBee无线侧看时,从目标节点接收到的VL ID信息通过类似路由器功能的节点再次得到了传送。最后,主节点的功能是作为一个ZigBee协调器和系统控制器接收信息并显示定位的结果(即,对目标节点处出现在屏幕上)。系统的主要配置也显示在表中。
表1
B.混合信道下的信号估计
图1中VL ID信息不是在射频ZigBee中,而是在波长为380 nm到780 nm的VL信号通道中接收的。通过一个LED阵列的VL信号发送器发送的身份信息能够得到发射机的大致位置,并写为k比特的二进制数字数据的形式:
(1)
其中是信号强度,p(.)是脉冲的形状,T是一比特的持续时间。图1中,
一列发光二极管传送器和光电二极管接收器之间的VL信号通道包括一条直接路径以及由于发射机之间的反射形成的多条反射路径。参照前人的作品结果[ 15-17 ],在图1中的脉冲响应h(t)可以表示为:
(2)
其中,是直接路径信号的信道增益,是反射路径信号的信道增益,是一个脉冲函数,是当抵达VL信号接收机时直接路径信号和反射路径信号之间的时间差。图1中信道冲激响应的特性可能不同。然而,图1中所示的系统功能并不是数据通信,而是估计目标位置。同时,我们注意到发射机和VL信号通道之间的距离很短,经过直接路径时只需要转换一些加法运算。因此,(2)式的VL信号信道冲激响应可以通过忽略反射路径简化为:
(3)
设,,S分别是光学滤波器增益、光学集中器增益以及光电二极管的VL信号接收区。设为入射角。我们假设入射角是在接收器FoV的范围内,即。假设LED的VL具有朗伯发射模式的扩散性,那么LED的VL在角度处的光强由下式给出:
(4)
其中为朗伯发射阶数,是发光LED的半功率角。如果=60°,那么m=1,(4)式可以简化为。VL发射器的发射功率由下式给出:
(5)
其中是发光二极管阵列的功率。直接通路信号增益由下式给出:
(6)
根据式(1)到(6)能够给写出接收信号:,即
(7)
其中n(t)是均值和单位方差为零的加性高斯噪声。
在图1中,当目标节点在办公室A的LED光源A附近时,带有接收器的VL信号和ID信息的节点,可以接收LED阵列灯发出的VL ID(0A)hex或(1)式的K位VL ID信息,并检测到目标办公室的位置。就像(7)式中表示的那样,所接收的信号取决于入射角,光强,以及发射机和接收机之间距离的平方。当目标节点移动到办公室N时,它接收到来自按公式N的LED光传送的VL ID(0N)hex,并确定当前位置的信息。然后,一个在定位VL ID信号中识别接收信号强度(RSS)的参数,能够在这一过程中计算出来。例如,Q次试验中的样本均值估计如下:
(8)
因此,根据接收信号强度可以得到信号估计,通过VL通道在目标节点也能得到VL位置的ID数据。
在图1中,ID数字数据的位置信息,可以通过能够进行无线发送和接收的目标节点转移到ZigBee无线网络。接收到的VL ID信号作了变换,在通过目标节点是从原来的K位二进制数字信息转换为如下所示的信息:
(9)
其中是变换后的信号强度,是代表独立的数据位的脉冲形状,是一个ZigBee数据位的持续时间。
当图1混合定位系统里目标节点的ZigBee收发器传送VL ID信息的二进制数据时,其通信特性遵循2.4兆赫的窄带室内无线信道,即一般窄带室内无线信道模型的通信特征。另外,该ZigBee的信道脉冲响应可以写成
(10)
其中和分别是在第m个群集中第i个路径的信号强度和到达时间。M是群集数,Z是群集中多路径项的数目。
假设一个由发射机产生的ZigBee脉冲通过窄带室内无线信道,Z在M群的多径分量到达ZigBee接收器的中继节点。根据实际的信道情况,集群的数目可能比M大或者小。当传输的Zigbee信号到达中继节点的接收器时,根据(9)和(10),接收到的信号可以写作:,即:
(11)
经过Q次实验后,接收信号强度的估计值(RSS)参数变量的估计值由下式给出:
(12)
有了脉冲响应,就可以从(12)中得到通过ad-hoc无线网络信道的、在主节点或中继位置ID数据的信号估计。
三、系统架构与操作
- 系统的总体架构
为了开发一个混合定位系统,整个系统安排如图2所示。基于系统控制器的PC通过串行通信接口连接到主节点。主节点在ZigBee中构建网络并像协调员一样分配网络地址。中继节点的功能是作为ZigBee中的路由器分发主节点分配来的网络地址。监测节点与串行连接方式的VL接收模块相连接,作为一个路由器或无线ad-hoc网络ZigBee终端设备,处理由协调器分配来的网络地址。
图2
图2中发光的LED发射出光线,含有位置新的习VL ID数据在380-780THz的频率变化范围中通过VL通道。到达光电二极管VL接收器模块的ID数据重建成数字信息,被传送到串行通信方式中的检测节点,并在主节点的系统控制器屏幕上和通过ZigBee无线ad-hoc网络的中继节点中显示。
图3
图3中示出了主节点、中继节点和监控节点的基本配置。每个节点都包括带有嵌入式ZigBee调制解调器的评估板和串行通信接口。每个节点的硬件配置分为4个主要模块,分别是处理器块,内存块,无线块,和输入输出块。处理器块是由一个使用32兆赫时钟的8051处理器核,一个DMA控制器及其外围构成的。其外围能在无CPU的操作下传输大数据块。内存块使用的是8KB SRAM和128 KB闪存;SRAM用于程序操作的程序存储,闪存用于数据存储。无线模块是由调制器和解调器构成的,是ZigBee无线通信、CSMA-CA信道接入方法的MAC算法逻辑以及频率合成器逻辑的核心模块。通过一根天线处理帧格式和信道分配中的实际编码数据,无线模块可以传送2.4GHz的Zigbee信号。I/O端口块有一些像定时器,ADC和UART这样的功能,并通过串行通信接口连接到系统控制器。每个模块都与使用8位数据格式的总线相连接。
B.可见光通信体系结构
整个系统安排如图2所示,其中VL发射机与接收机的详细配置如图4和图5所示。
图2中的VL ID发射器,二进制数据从PC通过RS232驱动电路和LED驱动电路以及驱动发光二极管。然后,VL ID信号通过VL的通道,被VL ID接收器所接收。其中VL ID接收器包括光学集中器,光电二极管和一个信号放大器。所接收的信号通过在接收机中的驱动电路,通过解调过程被重构成二进制数字信息。
基于VLC的无载波收发器架构如图4所示。在图4(a)的发射机中,位置ID信息被转换成二进制NRZ输入数据,只有当二进制数据“1”的时候VL信号才会产生,这是采用无载波的OOK调制的结果。发送的VL信号由接收机接收并采用非相干检测方法进行调制,获得原始的NRZ数据。NRZ数据通过RS232接口驱动电路再转换成位置ID信息,并转移到一个采用串行通信的监控节点。
图4
基于VLC的无载波接发器(第一种定位方式)适用于低数据速率的VL传感。这可用于跟踪货物以及在大型购物商场中做监测。然而,这种方法的缺点是有低频噪声。
为了克服这个缺点,我们考虑图5所示的基于VLC的带载波接发器技术。在图5(a)的发射器中,位置ID信息被转换成二进制码输入数据,当在二进制NRZ数据为“1”时调制4 MHz的载波。VL信号由照明LED产生,发送到达光电二极管。在图5(b)的接收器中,VL信号通过光学聚光器、光学滤波器和光电二极管进行处理,随后通过低噪声放大器放大并进行带通滤波。然后通过非相干检测进行解调,并恢复为原来的NRZ数据。然后再将NRZ数据通过RS232接口驱动电路转化为位置ID数据,并转移到串行接口的监控节点。
图5
由于固有的电路特性,基于VLC的带有4 MHz载波的收发器方案适用于高数据率VL传感和来自VL发射器的大范围VL接收。由于高数据速率传输和对抗噪声的鲁棒性,它也适合于中短距离的定位服务。例如,带有定位的本地广播VLC服务和带有视频终端的建筑导航定位。在下一节中将详细介绍带有4 MHz载波基于VLC收发器的硬件设计电路。
然后,接收到的信号通过监测节点转换成数字数据,在2.4 GHz oqpsk-dsss形成ZigBee无线信号后再次转换,传输到射频信号在无线信道上的节点。主节点接收到的射频信号转换后,监控
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[149895],资料为PDF文档或Word文档,PDF文档可免费转换为Word
您可能感兴趣的文章
- 饮用水微生物群:一个全面的时空研究,以监测巴黎供水系统的水质外文翻译资料
- 步进电机控制和摩擦模型对复杂机械系统精确定位的影响外文翻译资料
- 具有温湿度控制的开式阴极PEM燃料电池性能的提升外文翻译资料
- 警报定时系统对驾驶员行为的影响:调查驾驶员信任的差异以及根据警报定时对警报的响应外文翻译资料
- 门禁系统的零知识认证解决方案外文翻译资料
- 车辆废气及室外环境中悬浮微粒中有机磷的含量—-个案研究外文翻译资料
- ZigBee协议对城市风力涡轮机的无线监控: 支持应用软件和传感器模块外文翻译资料
- ZigBee系统在医疗保健中提供位置信息和传感器数据传输的方案外文翻译资料
- 基于PLC的模糊控制器在污水处理系统中的应用外文翻译资料
- 光伏并联最大功率点跟踪系统独立应用程序外文翻译资料


