利用色度角和哨兵2号影像识别水色异常
摘 要
由于受污染水体往往在区域中面积小以及分布广,进行人工实地筛选比较困难;而基于遥感的筛选具有快速、大规模和动态这三个优点。被污染的水体往往呈现出异常的水色,如黑色、灰色和红色。因此,通过高分辨率遥感影像和水色对疑似污染水体进行大规模识别,可以提高筛选效率,缩小筛选范围。但是目前对这种类型水体的研究却还很少。水体的色度角是在国际照明色彩空间委员会(CIE)中用来描述颜色的参数。根据实测数据,通过本研究设置的阈值以及基于Sentinel-2影像进行识别,将色度角大于230.958°的水体定义为水色异常。结果表明:利用Sentinel-2影像去提取水体的色度角,评价了利用原位遥感反射率Rrs (lambda;)计算的色度角的精度,其中均方根误差(RMSE)和平均相对误差(MRE)分别为4.397%以及1.744%,分别证明了该方法的可行性。对齐齐哈尔一处水色异常水体和一处一般水体进行了色度角计算。当色度角大于230.958°时,将水体视为水色异常,当色度角小于230.958°时,将水体视为一般水体。选取2016年5月至2019年8月齐齐哈尔市的高质量Sentinel-2影像,水体位置保持不变;没有出现误差或遗漏,水体色度角变化明显异常,表明该方法具有良好的稳定性。此外,该方法仅适用于光学深水,而不适用于光学浅水。将该方法应用于雄安新区,结果显示了良好的识别精度,表明该方法具有较好的通用性。本研究以齐齐哈尔市为例,于2018年10月14日至15日进行了地面调查实验,获得了6个一般水样点和4个异常水样点的测量数据,包括水质遥感反射率、透明度、水色、水温、浑浊度等。
关键词:Sentinel-2;遥感识别;水色异常;水体色度角;遥感反射率
第一章 介绍
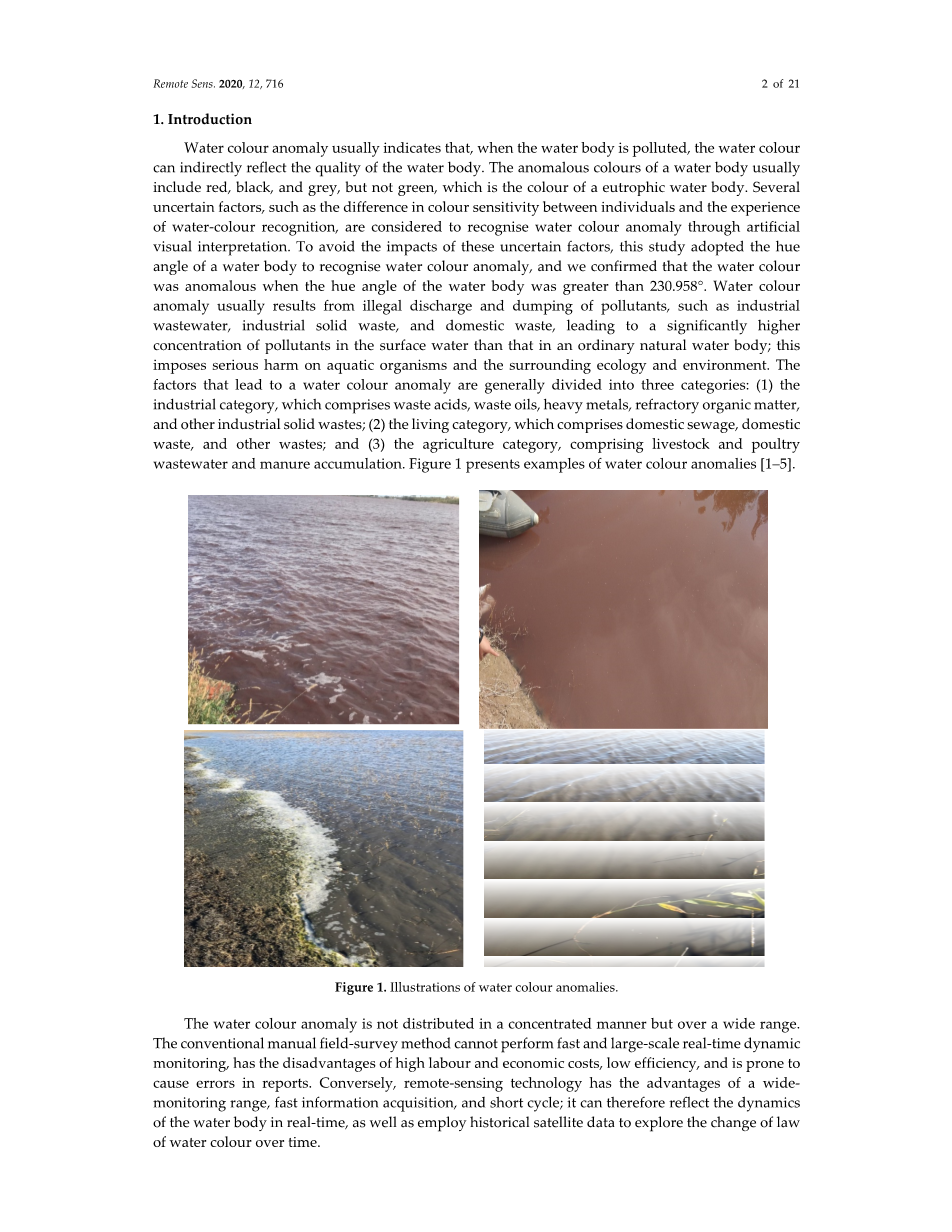
水体受到污染时,水色异常通常能够间接反映水体的质量。水体的异常颜色通常包括红色、黑色和灰色,但不包括富营养化水体的颜色绿色。在水色识别中存在着几个不确定因素,如个别水体之间的色彩敏感度的差异和经验的水色识别,被认为是应当通过人工目视解译来识别水色异常。为了避免这些不确定因素的影响,本研究采用水体的色度角来识别水色异常。当水体色度角大于230.958°时识别为水体异常。水色异常通常是由于污染物的非法排放和倾倒造成的,如工业废水、工业固体废物和生活垃圾,导致地表水中污染物浓度明显高于普通天然水体;这对水生生物及周边生态环境造成了严重危害。导致水色异常的因素一般分为三类:(1)工业类,包括废酸、废油、重金属、难降解的有机物以及其他工业固体废物。(2)生活类,包括生活污水、生活废物及其他废物;(3)农业类,包括畜禽废水和粪便的积累。图1展示了水色异常的例子[1-5]。
图 1 水色异常的插图
水色异常分布不集中但却分布范围广。传统的人工实地调查方法无法进行快速、大规模的实时动态监测,且存在劳动力成本和经济成本高、效率低、报告容易出错等缺点。但是遥感技术具有监测范围广、信息获取快、周期短等优点;因此,它可以实时反映水体的动态,并利用历史遥感卫星数据探索水色多时段变化规律。
1890年,Francois Alphonse Forel[6]第一次提出了水体颜色分类标准,将蓝色和绿色水体分为11个颜色等级。最初,在水色计的试管中,11种颜色是通过将不同比例的黄色剂(铬酸钾)加入到蓝色剂(硫酸铜)溶液中产生的。1892年,威利乌勒为水色表添加了从绿松石色到红褐色的十种颜色。Forel和乌勒生产的这11和10色等级就是今天所知的21色Forel - Ule色度计(或Forel -Ule)颜色指数;FUI)。诺沃亚等人[7]通过制定方案、透射分析和色谱等方法在FUI尺度上进行了光谱分析。近年来,利用遥感技术和水色监测水质取得了一些进展。在1978年,Alfold和Munday[8]基于Landsat MSS假彩色合成图像和水质评估了HIS色彩空间中色调和色彩饱和度之间的相关性。Wernand和van der Woerd[9]发现,在国际照明委员会(CIE)颜色空间和FUI指数a的主波长之间有很好的一致性。根据国际照明委员会(CIE)颜色空间通过Landsat TM计算红色,绿色和蓝色的波段。Jaquet和Zand[10]对水体营养状况与CIE颜色空间坐标之间的关系进行了定性评价。Bukata, Bruton, 以及 Jerome[11]还有Bkkata[12]确定了水色与水质的关系。Douml;rnhouml;fer[13]利用多年的中分辨率成像光谱仪(MERIS)数据和神经网络算法来计算检索叶绿素的吸收,在Kummerow湖中检测了总悬浮物和有色溶解有机物(440纳米),并检测了湖中的颜色变化。基于中分辨率成像光谱辐射测量(MODIS)数据,Wang[14]通过检索水色的主波长,分析水彩与水体中光学活性成分的关系来对水色进行分类。Wernand[15]提出了基于MERIS的遥感影像水体提取的FUI级算法。Garaba等[16]应用FUI系统对自然水域进行分类。利用MODIS数据,LI[17]通过观察水色变化,探究了2000 - 2012年中国十大湖泊的水质变化和营养状况。Shen[18]利用高分辨率多光谱影像的强度,采用纯度检验法对城市河流的黑色和恶臭水体进行识别。Wernand[9]等人使用Forel-Ule海洋颜色比较指标进行了光谱分析。Rudorff等人[19]在Landsat的基础上采用半分析方法来反演浊度,利用MODIS-Aqua卫星数据,测量采矿废水灾害对巴西东海岸多塞河羽流浑浊度的影响。Oron和Gitelson[20]利用遥感技术对某污水池的水质进行实时监测,找出污水遥感反射率Rrs (lambda;)变化的原因,提出通过观测遥感反射率Rrs (lambda;)的变化对严重污染的水质进行实时监测。
以往基于遥感的水质监测研究大多采用MERIS、MODIS和Landsat等卫星数据对水色正常的大型湖泊和水库的一般水体进行监测。但对水色异常的识别和监测研究较少[13-16,19-23]。由于观测时间长,空间分辨率高,且各波段(除两个热红外波段外)空间分辨率相同,Landsat数据有利于水质的长期监测和分析[21]。相比之下,由于空间分辨率较低,MERIS和MODIS数据多用于大型湖泊和水库水质监测[13,19] 。由于水色异常多发生在城市河流和工业区的坑池中,且覆盖面积较小,上述卫星数据的空间分辨率不足以识别水色异常。本文从Sentinel-2影像中提取水体的色度角,用于识别水体颜色异常,该方法适用于红色、棕色和灰色水体,不适用于绿色的富营养化水体。Sentinel-2卫星具有高时间分辨率(哨兵2A和哨兵2B是互补的,重访周期是5天),高空间分辨率(60米)、幅宽为290公里times;290公里,且由于稳定的轨道,不需要卫星图像进行几何校正。通过哨兵2号影像提取色度角来识别水色异常。需要进行大气校正、波段重采样、水体提取等预处理。利用Sen2Cor和欧洲航天局(ESA)开发的SNAP软件对Sentinel-2影像数据进行大气校正和波段重采样,获得10 m空间分辨率的地表反射率数据。基于遥感数据的水体提取方法主要有两种:(1)通过水体指数,如修正归一化水体指数法(MNDWI)、归一化水体指数法(NDWI)、自动水体提取指数法(AWEI)、多波段水体指数法(MBWI)、多光谱水体指数(MuWI)等[24-30];(2)通过支持向量机(SVM),极大似然法、决策树和随机森林法等分类方法[31,32]。利用水体指数提取水体的优点是应用方便、结果快速;但其波段信息有限,水体提取结果误差较大,最优阈值计算复杂,每幅场景图像都必须匹配一个最优阈值。相比之下,分类方法具有较高的准确率;然而,样品的采集复杂,处理耗时,样品选择的准确性也会影响水体提取的最终结果。
第二章 研究区和数据概况
2.1 研究区概况
齐齐哈尔市位于中国东北松嫩平原,位于东经122°-126°和北纬45°-48°处。2018年7月,齐齐哈尔市昂昂溪区污水坑池发现黑臭水体。黑龙江省政府向齐齐哈尔市政府发出监管函,要求齐齐哈尔市切实解决环境污染问题。在2016年7月之前,生活污水的排放和昂昂溪地区和工业和矿业公司生产的废水,如由黑龙江丰源实业集团有限公司,安康生物工程有限公司和活力源酵母有限公司,形成了几个巨大的黑色恶臭水体[33]。
雄安新区位于中国河北省保定市,规划范围包括雄县、荣成县、安新县。2017年,对安新县因多年垃圾、污水积累而形成的387个坑池进行了筛选,制定了“一坑一策[34]”的处理方案。研究区域如图2所示。
图 2 齐齐哈尔市和雄安新区研究区
2.2 数据获取
2018年10月14日和15日,在齐齐哈尔市富拉尔基区、昂昂溪区、德伯特县和扶余县收集了6个一般水体和4个水色异常的10个水样数据。2017年4月28日,在雄安新区安新县采集了4个一般水体和2个水色异常水体的6个水样。2018年10月5日,我们采集了雄安新区荣成县13个水样的数据,包括12个一般水体和1个水色异常。在每个试验点,测量水体的遥感反射率Rrs (lambda;),并拍照,记录水体的现场情况。2018年和2017年,齐齐哈尔市和雄安新区分别开展了卫星对地准同步试验,试验时间相差10天。2018年,在雄安新区进行了星地同步试验,如图3所示:
图 3 (a)齐齐哈尔市和(b)雄安新区。注:在齐齐哈尔市,样本1-6为一般水体,7-10为异常水体。雄安新区的样例1 ~ 4为一般水体,样例5 ~ 6为异常水体
2.2.1 原位遥感反射率
在图3所示的每个测试地点,使用ASD field-specR3便携式光谱辐射仪采集水面光谱。光谱测量采用NASA海洋光学协议[35]和Tang等人提出的水体光谱测量方法。为避免太阳耀斑和船体阴影的影响,观测方位角和天顶角分别设置为135和40[35,36]。每个采样点的光谱采集顺序为参考板、水体、天光、参考板,其中参考板和天光采集10个光谱,水体采集15个光谱。在计算遥感反射率时,剔除采集过程中的异常值,然后计算剩余光谱的平均值。遥感反射率计算为:
(1)
<p
剩余内容已隐藏,支付完成后下载完整资料</p
英语原文共 21 页,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[596202],资料为PDF文档或Word文档,PDF文档可免费转换为Word
您可能感兴趣的文章
- 饮用水微生物群:一个全面的时空研究,以监测巴黎供水系统的水质外文翻译资料
- 步进电机控制和摩擦模型对复杂机械系统精确定位的影响外文翻译资料
- 具有温湿度控制的开式阴极PEM燃料电池性能的提升外文翻译资料
- 警报定时系统对驾驶员行为的影响:调查驾驶员信任的差异以及根据警报定时对警报的响应外文翻译资料
- 门禁系统的零知识认证解决方案外文翻译资料
- 车辆废气及室外环境中悬浮微粒中有机磷的含量—-个案研究外文翻译资料
- ZigBee协议对城市风力涡轮机的无线监控: 支持应用软件和传感器模块外文翻译资料
- ZigBee系统在医疗保健中提供位置信息和传感器数据传输的方案外文翻译资料
- 基于PLC的模糊控制器在污水处理系统中的应用外文翻译资料
- 光伏并联最大功率点跟踪系统独立应用程序外文翻译资料


