
英语原文共 10 页,剩余内容已隐藏,支付完成后下载完整资料
附录A 外文译文
2018年传感器网络和信号处理国际会议(SNSP)
RGBLED照明中Visual-MIMO系统符号决策的性能改进
Ki-Soo An
Department of Convergence Design amp; Technology, Kookmin University
Multimedia Communication amp; Signal Processing Lab Seoul, Republic of Korea crc2017@kookmin.ac.kr
Ki-Doo Kim*
Department of Electronics Engineering, Kookmin University
Multimedia Communication amp; Signal Processing Lab Seoul, Republic of Korea
*Corresponding: kdk@kookmin.ac.kr
摘要:在本文中,我们提出了一种具有代表性的颜色选择方法,即去除饱和白色,以提高使用RGBMIMO系统的颜色独立的符号颜色决策性能。我们应用kmeans聚类将所有像素表示为一组颜色,并通过使用一组颜色的标准偏差来去除位于标准光源E周围的颜色聚类。其余的颜色集的平均值决定了符号的颜色。我们证明,该方法比传统的RGBLED照明的平均方法提高了符号决策精度。
关键词-RGBLED;Visual-MIMO;颜色无关;kmeans;相机图像传感器;GCM
- 介绍
由于LED具有高速响应特性,它不仅可以作为照明应用,也可以作为通信设备应用。因此,对LED阵列与相机之间通信的视觉MIMO的研究进行了积极的[1-4]。Visual-MIMO在系统开发和基础设施建设方面具有优势,因为这款通过智能手机在公众中流行的相机可以用作接收器。此外,还研究了具有广义颜色调制(GCM)的颜色独立视觉MIMO[3,4]。“与颜色无关”是指在通信过程中不损坏照明的目标颜色。此外,GCM是一种调制方法,可以不考虑颜色和强度变化的光[5]。GCM可以混合一些颜色,在色域区域内产生任何颜色,并可以使用RGBled来实现。因此,可以在执行可见光通信时保持所需的颜色。
在本文中,我们提出了一种具有代表性的颜色选择方法来提高RGBLED照明中与颜色无关的视觉MIMO系统的符号决策性能。
- 与颜色无关的视觉-mimo系统
颜色独立的视觉MIMO系统通过RGBLEAs(LED阵列)使用基于颜色空间的调制传输数据,并通过识别从摄像机接收到的图像中的颜色信息来解调数据。图1
978-1-5386-7413-0/18/$31.00copy;2018IEEEdoi10.1109/SNSP.2018.00077
365
显示了一个与颜色无关的可视化的MIMO系统[2,3]的收发过程。
图1.一个与颜色无关的视觉MIMO系统的收发过程框图
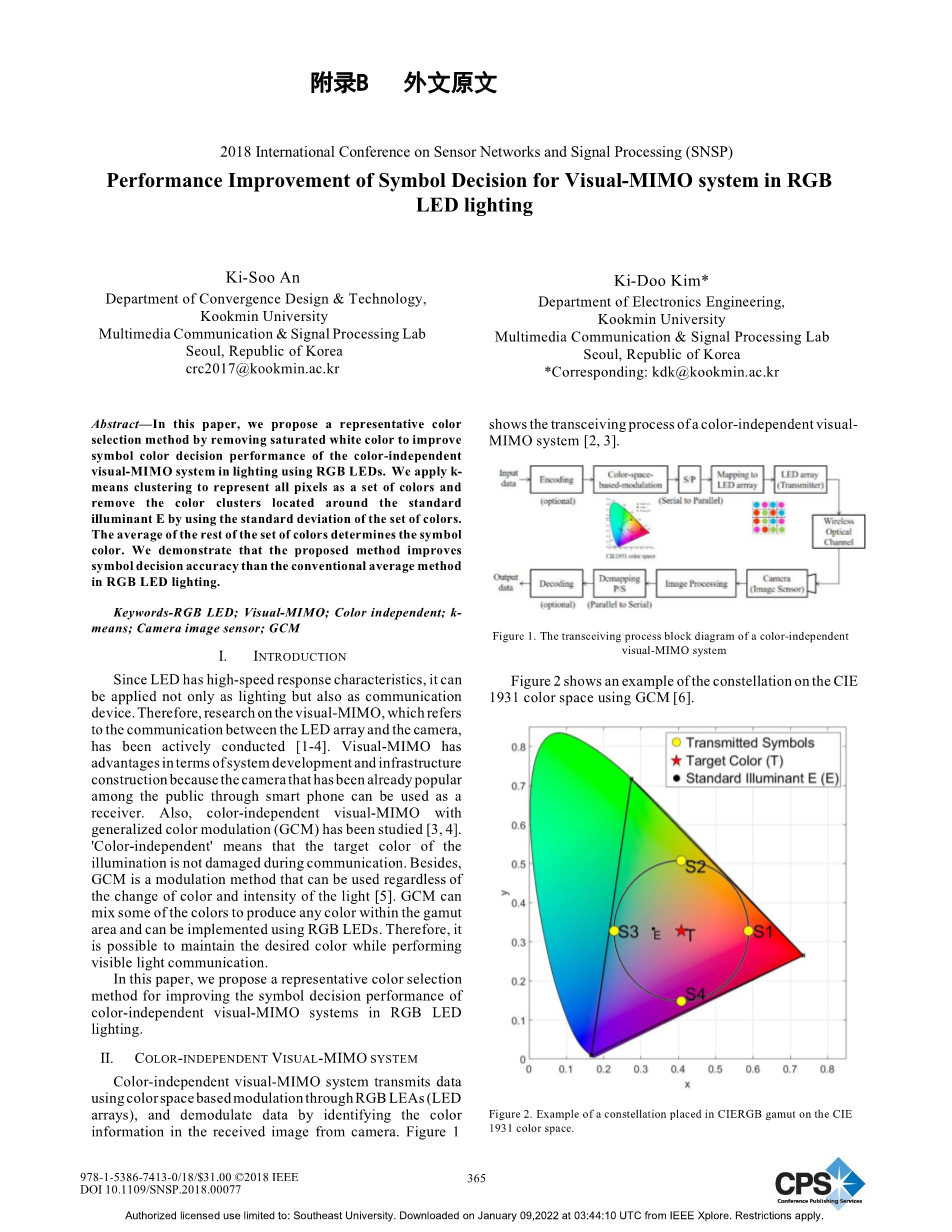
图2显示了使用GCM[6]在CIE1931颜色空间上的星座示例。
图2.在CIE1931颜色空间上放置在CIERGB色域中的一个星座的例子。
在图2中,以目标颜色(T)为中心,在星座上构造了四个颜色符号(S1、S2、S3、S4)。为了传输颜色符号,发射器将颜色空间中的每个颜色符号转换为与该位置对应的RGB强度值,并将其映射到LEA。在接收端,相机图像传感器捕获发出光的LEA,接收颜色符号,并执行符号决定。此时,需要选择接收到的颜色符号的代表性颜色,以提高符号决策精度。
由于相机的动态范围限制、环境光的影响、混合RGB颜色时通道间的串扰,接收的颜色符号像素的R、G和B值饱和到中心周围的255值。而完全饱和的颜色的位置将为(x=1/3,y=1/3),这是标准光源E(R:G:B=1:1:1)的坐标。受这种噪声影响的部分被白色饱和,这可能不包括颜色信息,并且只有光源圆的边缘包含颜色信息。此时,如果我们通过调整相机设置[7]来接收一个曝光率较低的图像,我们就可以解决一些颜色饱和度问题。图3和图4分别显示了visialMIMO系统中低曝光的相机接收到的图像和接收图像中使用圆形Hough变换[8]分离的颜色符号。
图3.由具有低曝光设置的相机接收到的图像。
图4.在图3接收图像中使用圆形霍夫变换分离的颜色符号。
为了确定图4中接收到的颜色符号的代表颜色,通常可以选择该符号的代表颜色作为所有像素的平均值。这是很容易出错的,因为带有白色的饱和区域可以很宽。在符号决策步骤中,计算从接收符号的代表颜色位置到星座上的每个传输符号的欧氏距离,并取最近的传输符号。
表1为vivalMIMO的实验环境。
表一.视觉模型的实验环境
|
项目 |
设置 |
|
|
RGBLED阵列 |
ws2812b |
|
|
距离 |
25cm |
|
|
相机设置 |
智能手机 |
LG G6 |
|
图像传感器 |
IMX258AF相机 模块 |
|
|
分辨率 |
4160 * 3120 (13MP, 4:3) |
|
|
ISO |
50 |
|
|
快门速度 |
1/200[s] |
|
|
白平衡 |
汽车(5400K) |
|
|
操作系统 |
安卓8.0 |
|
如表1所示,我们将LED阵列与相机之间的距离设置为25cm,对光的灵敏度设置为ISO50,快门速度设置为1/200[s],以防止闪烁,实现低曝光。另外,在相机镜头前放置白纸后,我们可以利用自动白平衡功能得到白平衡设置值。因此,我们根据环境光的色温使用自动调整的值(5400K)。以下实验是在表1的环境下进行的。
- 提出的方法
在本文中,我们应用k-means聚类算法,利用标准差去除位于标准光源E周围的颜色符号簇,并通过选择代表性颜色作为剩余聚类的平均值来提高符号决策性能。
首先,为了应用K-means聚类算法,必须确定聚类的数量(K)。簇数量的选择应考虑性能、稳定性和计算复杂度来选择代表性颜色。因此,定义适当的集群数量是很重要的,对此的研究已经积极进行了[9-11]。在K-means聚类中,聚类的数量(K)小于像素的总数,并且必须至少为两个。聚类数量越少,计算[9,10]的优势越大。因此,簇的数量是通过考虑符号决策所需的精度和计算时间来确定的。在本实验中,像素的总数等于圆圈面积的整数部分(gr2),其中半径(r)等于图4中圆形符号区域半径上的像素数。.
366
图5以30个颜色簇为例,查看每个接收到的颜色符号的簇分布,每个簇的中心点显示在CIE1931颜色空间中。
使用距离(DSi,k),在等式中(3),我们计算平均值(Mdict,Si)和标准偏差(oSi),如等式(4)和等式(5),分别。此外,一个有标准差(oSi)作为每个符号的半径(r),并以一个中心为标准照明剂E(x=1/3,y=1/3)在等式中定义(6).然后,将位于圆圈内的颜色簇视为白色簇并去除。
Mdict,S
=1Sigma;K
DS ,k
(4)
i Ki=1 i
oS= J1Sigma;K
(DS ,k— Mdict,S)2
(5)
i Ki=1 i i
(x —1)2 (y —1)2= (oS)2 (6)
3 3 i
图5.每个接收到的符号的颜色簇(K=30)。
在图中。5、虽然根据每个接收到的符号存在形状上的不同,但一般来说,可以确认颜色簇从发送的符号位置向标准光源E分布。如果在去除以标准光源E为中心的圆中的白色簇后选择代表颜色,则代表颜色可以更接近传输的符号,也可以提高符号决策精度。去除标准光源E周围的白色团簇的方法如下。
集合(CSi,k,1le;kle;K)的颜色簇坐标的符号(Si,i=1、2、3、4)被定义为(1)。
CSi,k= {(x1, y1),(x2, y2),hellip;,(xk, yk)} (1)
对于每个接收到的颜色符号,位置平均值(McSuc,Si)的颜色簇和距离(DSi)的位置平均值用等式表示(2)和等式(3),分别。
等式的处理过程(1)到等式(6)可以应用于每个接收到的符号,以选择一个有代表的颜色,其中一个白色簇已被删除。
表2显示了图中标记物的颜色。6根据簇的数量表示代表颜色的位置。
表二.根据簇的数量,表示代表颜色的位置的标记颜色。
|
标记颜色 |
集群数量(K) |
方法 |
|
白的 |
没有集群 |
传统的 |
|
锡安 |
2 |
拟议 |
|
橘子 |
3 |
拟议 |
|
红色的 |
9 |
拟议 |
|
蓝色 |
50 |
拟议 |
McSuc,S
=1Sigma;K
CS ,k
(2)
i Ki=1 i
DSi,k=J(CSi,k,s— McSuc,Si,s)2 (CSi,k,y— McSuc,Si,y)2(3)
图6.根据接收到的颜色符号的簇数来确定的代表颜色的位置。
367
随着接收的符号的代表颜色更接近发送的颜色符号的位置,符号决策精度提高。从图6中可以看出,传统方法得到的代表性颜色(白色)和传统方法得到的代表性颜色(剩余颜色)可以看出,符号决策性能可以得到提高。
图6还显示,性能的代表颜色青色标记分析两个集群比代表三个颜色或更多的集群,当集群的数量超过三个,性能类似于当集群的数量是三个。因此,考虑到计算量,我们采用了三个聚类,并进行了以下实验。
图7显示了传统方法在对K=3进行聚类时的结果以及所提方法的结果。
图7。结果通过在可视化MIMO系统中使用选定的代表性颜色(K=3)。
从图7中提出的方法的结果来看,与传统方法相比,具有代表性的颜色更接近传输的符号位置,可以提高符号决策精度。
- RGBLED照明和颜色独立的视觉-mimo系统
在照明方面,我们可以根据国际照明委员会[12]定义的1931年CIE1色空间中HunterLab测量的相关色温来使用白色。
图8为CIE1931颜色空间中白色随相关色温的分布曲线。
图8.CIE1931色空间中白色随相关色温的分布曲线。
室内照明一般采用4000K的白色
~6500K,为图中的红框面积。8,并遵循通过测量日光获得的D50~D65(5000K~6500K)的数据。因此,在一般的照明中,在标准光源E(约5400K)周围的区域使用白色。
图9显示了在照明中使用的色温下,在标准光源(F11、D50、D55和D65)的目标颜色下所提出的视觉MIMO的实验结果。
-
- 标准照明灯F11 (b)标准照明灯D50
(c)标准照明灯D55 (d)标准照明灯D65
图9.将该方法应用于标准照明照明剂的结果。
如图9所示,在颜色独立的可视化MIMO系统中,在照明时使用的标准光源被设置为目标颜色,我们确认了
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[603960],资料为PDF文档或Word文档,PDF文档可免费转换为Word
您可能感兴趣的文章
- 饮用水微生物群:一个全面的时空研究,以监测巴黎供水系统的水质外文翻译资料
- 步进电机控制和摩擦模型对复杂机械系统精确定位的影响外文翻译资料
- 具有温湿度控制的开式阴极PEM燃料电池性能的提升外文翻译资料
- 警报定时系统对驾驶员行为的影响:调查驾驶员信任的差异以及根据警报定时对警报的响应外文翻译资料
- 门禁系统的零知识认证解决方案外文翻译资料
- 车辆废气及室外环境中悬浮微粒中有机磷的含量—-个案研究外文翻译资料
- ZigBee协议对城市风力涡轮机的无线监控: 支持应用软件和传感器模块外文翻译资料
- ZigBee系统在医疗保健中提供位置信息和传感器数据传输的方案外文翻译资料
- 基于PLC的模糊控制器在污水处理系统中的应用外文翻译资料
- 光伏并联最大功率点跟踪系统独立应用程序外文翻译资料


