
英语原文共 11 页,剩余内容已隐藏,支付完成后下载完整资料
静态平衡制动器
MichielPlooij*,TomvanderHoeven,GerardDunning,MartijnWisse
摘 要
传统的制动器需要一个强大的执行器,导制制动器又大又重,大多数情况下都是能量调节制动器。本文介绍了一个根本不同的制动概念,称为静态平衡制动器(SBB)。SBB不需要任何驱动力来保持制动转矩,并且只需要移动小的质量来改变该扭矩。因此,他们的能源消耗潜力很小。在SBB中,两个摩擦表面中的一个通过弹簧连接到制动块。该制动块通制过机构连接到第二组弹簧,其另一侧连接到地面。两组弹簧中的总能量是恒定的,这在制动块处产生零力特性。该静态平衡制动块的位置确定第一组弹簧的位移,从而确定摩擦表面之间的法向力。我们分类可用于SBB中的机构,并显示两个实施例:一个具有负刚度的位置范围的板簧,一个具有扭转弹簧和非线性凸轮机构的机构。结果表明,与常规制动器相比,制动力可以减小大约95-97}。这表明在SBB中,制动力几乎可以消除,因此显示出SBB的小,重量轻和节能的潜力。
1.介绍
传统制动器需要一个强大的执行器,在两个摩擦表面之间产生法向力[1,2]。法向力的振幅,摩擦系数和制动器的几何形状一起决定了制动力矩。由于尺寸和重量限制或其(潜在的高)能量消耗,存在强大的制动器不期望的应用。因此,研究人员已经设计出需要较少制动力的制动器。
关于所需制动力的减少的研究可以分为三类,这些也在最近关于锁定机构的综述论文中描述[3]。首先,已经开发了使用摩擦表面之间的相对运动将摩擦表面拉在一起从而减少所需的制动力的自动接合制动器[4-7]。这种制动器的缺点是它们仅在一个制动方向上工作,并且它们只能沿相反的接合方向脱离。其次,弹簧制动器(也称为安全制动器或停车制动器)使用弹簧来保持制动器没有制动力[2,8-10]。然而,这些制动器仍然需要制动力以保持制动器分离。这在第三类中得到解决:双稳态制动器[11,12]。这种制动器具有双稳态元件(例如双稳态弹簧),为制动器提供两种稳定状态:接合状态和分离状态。然而,这两种状态之间的切换仍然需要很高的制动力。
其他研究人员专注于实施具有高力量密度和低能耗的执行器。最好的例子是压电制动制动器[13-17]。由于它们的强度密度高,能量消耗低,它们在解决上述问题上可能非常有效。然而,它们需要高电压(可能不可用),非常精确的制造(因为它们具有非常小的行程)并且是昂贵的。此外,制动器结构必须非常硬,否则结构将变形,这降低了压电制动器的有效性。
最先进的制动器的问题是制动器必须能够产生等于摩擦片之间的法向力的力。本文的目的是介绍其中法向力和制动力被解耦的制动概念。这个概念有可能将制动力降低100%。
这种新的制动概念与当前的制动概念截然不同,被称为静态平衡制动器(SBB,参见图1).BB不需要驱动力来保持一定的制动力矩,只需要较小的制动力来改变扭矩。此外,通过小的调整,可以将SBB改变为结合上述三种不同功能(即常规,弹簧和双稳态性能)中的任何一种,同时仍需要小的制动力。静态平衡机制也被用于本质安全机器人手臂[18,19],外骨骼[20],假体[21]和微观和精密机制[22,23]。
图1.静态平衡制动器的两个原型的图片。(a)具有板簧的原型,具有负刚度的位置范围。(b)具有扭力弹簧和旋转凸轮机构的原型。
本文的其余部分结构如下。首先,第2节更详细地说明了SBB的概念。然后,第3节将SBB的所有可能的实施例分类为相对简单且因此小而轻的SBB。第4节和第5节则展示了SBB的两个原型及其性能。这些结果将显示,原型中的制动力减少了95-97%。最后,本文结束于6节的讨论和第7节的结论。
2.平衡制动器的概念
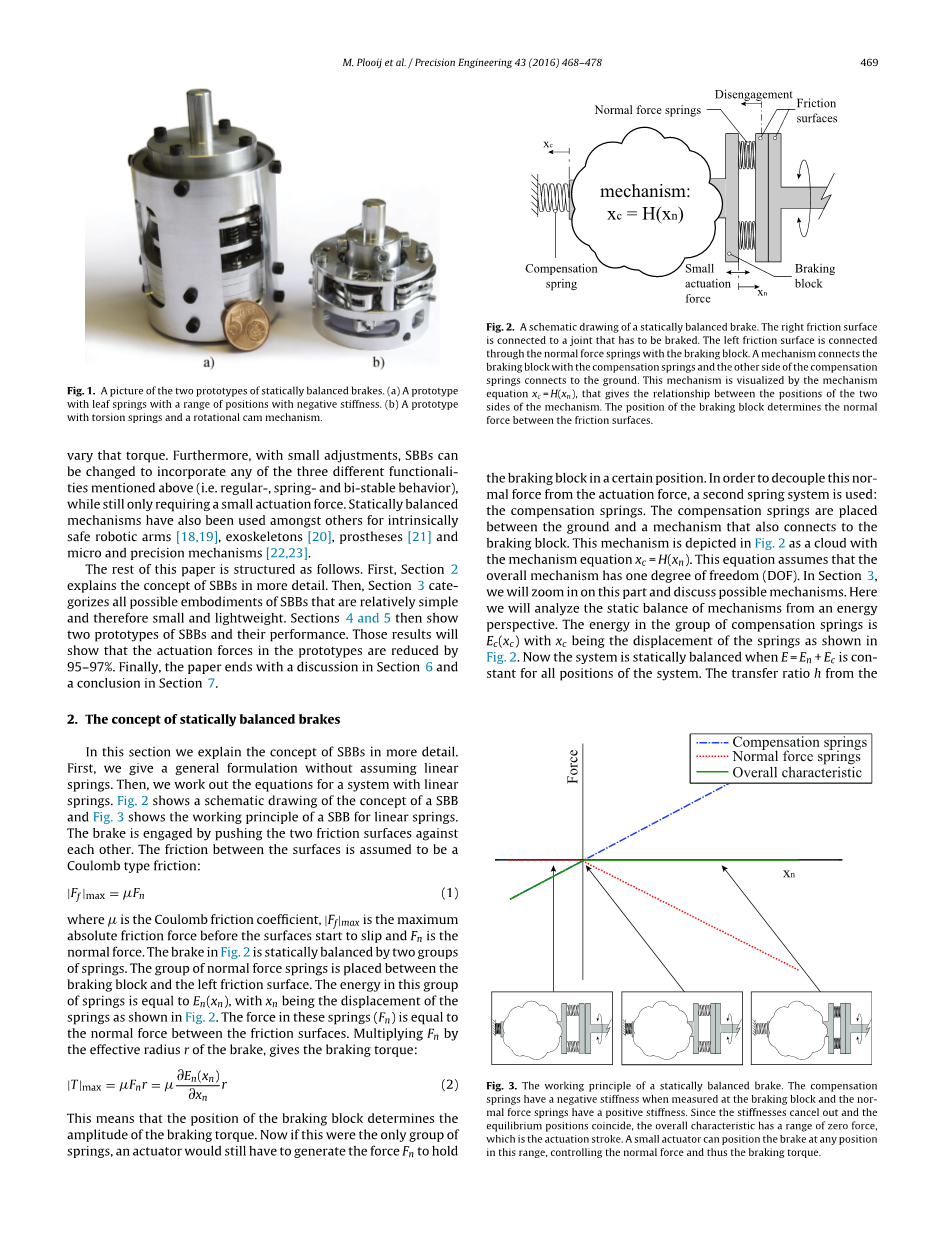
图2静平衡制动器示意图。正确的摩擦表面连接到必须制动的接头上。左侧摩擦面通过法向力弹簧与制动块连接。一个机构将制动块与补偿弹簧和补偿的另一侧相连弹簧连接到地面。该机制通过机理方程可视化,给出机构两侧位置之间的关系。制动块的位置决定了摩擦表面之间的法向力。
在本节中,我们更详细地说明SBB的概念。首先,我们给出一般的配方,而不设线性弹簧。然后,我们计算出线性弹簧系统的方程式。图2示出了SBB的概念的示意图,图3显示了线性弹簧的SBB的工作原理。通过将两个摩擦表面相互推压来接合制动器。表面之间的摩擦被认为是库仑型摩擦:
|
(1) |
库仑摩擦系数mu;在的地方,是表面开始滑动之前的最大绝对摩擦力,是法向力。图2中的制动器由两组弹簧静态平衡。该组法向力弹簧位于制动块和左侧摩擦面之间。这组弹簧中的能量等于弹簧的位移,如图2所示。这些弹簧中的力等于摩擦表面之间的法向力。乘以制动器的有效半径r给出制动力矩:
|
(2) |
这意味着制动块的位置决定了制动力矩的幅度。现在如果这是唯一的一组弹簧,那么执行器仍然必须产生力以将制动块保持在一定位置。为了使该法向力与制动力分离,使用第二弹簧系统:补偿弹簧。补偿弹簧放置在地面和一个也可以连接的机构之间制动块。该机制如图2所示。作为云的机理方程。该方程假设整体机制有一个自由度(DOF)。在第3节中,我们将介绍这一部分,并讨论可能的机制。在这里我们将从能源的角度分析机制的静态平衡。补偿弹簧组中的能量是弹簧的位移,如图2所示。当系统的所有位置为常数时,系统都是静态平衡的。从法向力弹簧到补偿弹簧的转移比率等于:
|
(3) |
我们现在可以写静态平衡的条件
|
(4) |
|
|
(5) |
现在鉴于这两个弹簧的特点,这个系统对于所有的x都是静态平衡,对此,它保持
|
(6) |
补偿弹簧施加在制动块上的力可表示为:
|
(7) |
这是合乎逻辑的,因为这导制力平衡,这是考虑静态平衡的另一种方法。现在假设法拉力弹簧和补偿弹簧是线性的:
|
(8) |
|
|
(9) |
和是弹簧刚度的位置和最大操作者返回两个输入的最大值和摩擦表面脱离模型。方程式(6)现在变成:
|
(10) |
从式(10)可以看出。这意味着该机构处于单一位置,或者该机构包含一个使两个运动分离的离合器。从等式(8)和(9)和要求是恒定的,因此对于线性弹簧,机构应该满足:
|
(11) |
使用方程(3),传递函数变为:
|
(12) |
图3示出了作为制动块的位置的功能的这种机构中的力的示意性说明。该图示出了总体特性等于零,而在这些位置处的法向力线性地取决于位置。这意味着执行器不必施加任何力来在摩擦表面之间保持一定的法向力。注意在本例中,意味着系统不是静态平衡的。
SBB的概念取决于两个摩擦表面之间的法向力的解耦和接合或分离制动器所需的力。没有静态平衡,移动制动块的执行器也必须传递将摩擦表面推到一起的力。通过静态平衡,制动块可以通过不需要抵抗任何弹簧力的制动器来移动(等式(7))。该控制位置决定制动转矩(方程(2))。
图3.静态平衡制动器的工作原理。补偿弹簧在制动块处测量时具有负刚度,法向力弹簧具有正刚度。由于刚度抵消并且平衡位置重合,所以整体特性具有作用于制动行程的零力的范围。小型执行器可以将制动器定位在该范围内的任何位置,从而控制法向力,从而控制制动转矩。
3.可能的实施例
前一节介绍了SBB机制的要求。理论上,当满足这些要求时,可以实现100%的制动力的降低。为了设计满足这些要求的机制,在本节中我们对适用于SBB的机制进行分类。其中两个概念被构建,结果将在接下来的两节中显示。
分类受到三个约束的限制,这将导制可能具有小而轻量级的机制。首先,我们只考虑一个自由度机制。SBB的更多DOF机制也是可能的,但这需要额外的组件,额外的执行器,增加制动器的尺寸和质量。其次,用作法向力弹簧或补偿弹簧的弹簧类型应与其所连接的DOF类型相匹配。例如,我们不考虑平移弹簧连接到旋转连杆的机构。这种结构不允许弹簧和DOF的对准,因此将导制尺寸的增加。第三,我们只考虑组件数量最少的机制。例如,考虑四杆机构,但不考虑具有一个DOF的八杆机构。
通常,机构可以分为刚体机构和顺应机制。在刚体机构中,除了平移或旋转的弹簧之外,所有部件都是刚性的。为了本文的目的,我们将刚体机构分为联动机构和凸轮机构。机构的整体分类如图1所示。4,这也已经显示哪些类别是可行的。本节首先分析刚体机制,然后分析合适的机制。本分析结果列出了可行的概念和描述如何构建它们。
3.1刚体:连接
SBBS的第一类刚体机构是联动机制。为了进一步分类一个自由度联系,我们必须认识到,该机制至少应该具有一个单一的位置。这来自公式(10),其中转移函数在x位置变为零。该位置应可达到完全卸载法向力弹簧以获得零制动力矩。因此,我们通过对奇异机制进行分类,进一步对联动和凸轮机构进行分类。那里存在关于单一机制的文献和如何对它们进行分类[24-26]。然而,这些分类是基于不同类型的机械奇点,并不会导制完整的机制清单。在这里我们介绍一个新的分类提供这样的列表,并且仅包括简单的奇异机制,导制小而轻的设计。我们对奇异机制的分类是基于所有一个DOF奇异机制具有一个输入运动和一个输出运动的概念。在简单的奇异机制中,这些输入和输出运动是平移或旋转运动。在联系中,这导制四个类别:
1.平移输出-平移输出(见图5a),
2.平移输入-旋转输出(见图5b),
3.旋转输入-平移输出(见图5b),
4.旋转输入-旋转输出(见图5c)。
图4.静态平衡制动机构分类的可视化
在刚体机构和顺应机构之间进行第一分割。刚体机构分为联动和凸轮机构联动是根据其输入和输出(旋转或平移)的性质分类的。一类联系导制一个可行的概念。凸轮机构根据其输入,输出和凸轮运动(旋转或平移)的性质进行分类。在灰色类别中,可以获得完美的静态平衡。从深灰色类别我们在本文中展示了一个原型。
图5。收集到可能的简单单数联动机制。(a)具有平移输入和输出的机制。该机制可以静态平衡(b)具有平移输入和旋转输出的机构。(c)具有旋转输入和输出的机构。(d)静态平衡版本的(a)
所有机制使用相同的符号。表示弹簧的位移,并且可以是旋转的或平移的,表示输入和输出平移或旋转的位置。并分别指恒定的距离和角度。表示法向力弹簧和补偿弹簧的刚度。并且最后指的是d和gamma;当机构位置改变时改变的距离和角度。
下面将讨论四类机制。在讨论之前,应该注意的是,平移法向力弹簧的位置在旋转和平移时变得不切实际;看到例如图5a左边的弹簧因此,平移法向力弹簧只能连接到与弹簧一制的滑块。这也确保了在某一位置,法向力弹簧中的力变为零。
3.1.1平移输入-平移输出
该机制的一般化版本如图5所示。它由两个滑块组成,相交于o点,表示两个滑块之间的角度,并表示从o点上测量的滑块的位置。两个滑块之间的连接具有长度,并且每个滑块连接到弹簧。弹簧的另一侧在距离和角度不等的地方连接到地面。因为左边的弹簧应该在一起与左滑块,给定。系统中的能量可以通过应用余弦规则来获得:
|
(13) |
|
|
(14) |
是不变的术语
|
(15) |
我们可以导出作为的函数;从等式(13)并将其填充到等式(14)中。现在静态平衡,方程式(4)应该为所有,当时,这是真的。这种机制如图1所示。5d,其中地面可以沿虚线自由移动。在该示例中,法向力拉伸弹簧变为压缩弹簧,并连接到摩擦片。这一类别导制可行的解决方案的事实在图1中被显示。这个类别的可行机制不是新的机制[27]。然而,这里我们证明这个机制其实是这个类别中唯一可行的机制。
3.1.2平移输入-旋转输出
该机制的一般化版本如图5b所示。它由一个零位的滑块组成;在o处为0,并且具有长度为的连杆的曲柄机构。一个弹簧放置在滑块和地面之间,另一个放置在其间曲柄和地面。由于左弹簧应与左滑块一制,所以给定。该系统中的能量可以推导如下。首先,我们将定义为连接曲柄的两个杆的连接点与线之间的距离:
|
|
(16) |
其中是旋转弹簧的平衡位置。对于静
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[137005],资料为PDF文档或Word文档,PDF文档可免费转换为Word
您可能感兴趣的文章
- 饮用水微生物群:一个全面的时空研究,以监测巴黎供水系统的水质外文翻译资料
- 步进电机控制和摩擦模型对复杂机械系统精确定位的影响外文翻译资料
- 具有温湿度控制的开式阴极PEM燃料电池性能的提升外文翻译资料
- 警报定时系统对驾驶员行为的影响:调查驾驶员信任的差异以及根据警报定时对警报的响应外文翻译资料
- 门禁系统的零知识认证解决方案外文翻译资料
- 车辆废气及室外环境中悬浮微粒中有机磷的含量—-个案研究外文翻译资料
- ZigBee协议对城市风力涡轮机的无线监控: 支持应用软件和传感器模块外文翻译资料
- ZigBee系统在医疗保健中提供位置信息和传感器数据传输的方案外文翻译资料
- 基于PLC的模糊控制器在污水处理系统中的应用外文翻译资料
- 光伏并联最大功率点跟踪系统独立应用程序外文翻译资料


