英语原文共 9 页,剩余内容已隐藏,支付完成后下载完整资料
滑模控制在风能转换系统发电机及电网侧控制的实现
Adel Merabet,IEEE会员,Khandker Tawfique Ahmed,IEEE会员,Hussein Ibrahim,和IEEE会议的Rachid Beguenane
【摘要】本文提出了一种基于风能转换系统变速实验情况下的发电机及电网侧的二阶滑模控制策略。在发电机侧,转子转速受控以追踪风力机产生的功率曲线以实现最大功率的提取。在电网侧,直流母线电压被调节以实现功率的正确传输。控制策略基于单输入单输出模型误差的干扰和二阶滑模控制算法。所提出的二阶滑模控制策略展现了令人关注的特性,例如对风力涡轮机和发电机参数不确定以及外部干扰具有鲁棒性。风能转换系统转速和直流母线电压的控制策略在OPAL-RT实时仿真器(OP5600)驱动的模拟风力发电机上完成了验证。实验结果表明,所提出的控制策略在速度和直流母线电压控制方面是有效的。滑模控制方法对于未知扰动,参数变化和系统的不确定性具有很强的鲁棒性。此外,它不会产生扭矩的震颤,从而降低了风力涡轮机的机械应力。
索引术语 - 直流母线电压,转子速度,二阶滑模控制,风能转换系统
引言:
在宽风速范围内以最大功率系数运行的变速风能转换系统(WECS)需要进行精确控制。它允许通过改变轴旋转速度跟踪风速变化,尽管会在系统中出现误差[1] - [4]。
二阶滑模控制(2-SMC)算法提供了一个合适的选项来控制在扰动环境中工作的非线性不确定系统。这些技术包括通过滑动变量及其有限时间的一次导数确保零跟踪误差,通过使用连续控制来减少震颤现象[5] - [7]。现在已经深入研究了风能转换系统的功率和转速控制以实现最大功率提取。在文献[8]中,通过将二阶滑模方法应用于系统的机械动力学模型来控制风力发电机的功率,其中[9]使用滑模控制来跟踪转矩以实现最大功率提取。在[10]和[11]中,将滑模控制应用于转子转速控制。在[12]中,基于滑模控制的磁场定向控制与空气动力学转矩观测器相结合。在[13]中,使用基于Lyapunov技术的超扭转滑模控制来实现速度跟踪。在[14]和[15]中,高阶滑模算法被应用于涡轮发电机的机械和电气动力学模型以实现速度控制,其中[16]将该方法用于功率控制。此外,SMC方法在电动机应用中引起关注,以实现具有干扰补偿的有效跟踪性能[17],[18]。
在WECS的上述工作中,没有讨论直流母线电压的控制问题,维持它的稳定性问题以及对发电机的功率流向或速度控制对直流侧电压的影响,只有少数这方面的工作可以发现[19];因此,这个问题将在本文中进行研究。
在本文中,应用了两个二阶滑模控制算法,用于同时控制发电机侧的转子转速和电网侧的直流电压,以便在最大功率提取下运行WECS。在这种控制策略中,输出(转速和直流侧电压)的跟踪误差在具有干扰变量的单输入单输出(SISO)线性系统下被建模,包括参数变化,未建模的量和未知的涡轮扭矩,这将被所提出的控制器拒绝以确保鲁棒性,而不需要知道或观察空气动力学转矩。
本文的结构如下:
风力涡轮机(WT)动力学模型在第二部分中给出。转速和直流侧电压的二阶滑模控制器设计分别在第三节和第四节中详细说明。用于验证所提出的控制策略的实验在第五节中进行,实验结果在第六节中讨论。
图1 模拟风力发电机
二: 风力机系统
风力机功率的获取与可用风力和机器的功率曲线相关,如公式1所示。
(1)
式中,是空气密度,r是风轮叶片的半径,是风速,是风力机根据最佳叶尖速比得出的功率系数。
最佳叶尖速比的公式定义为式2:
(2)
其中是风机转子转速。
根据最佳叶尖速比表达式(2),在保持转子转速恒定的同时,风速的任何变化将会改变最佳叶尖速比,从而导致功率系数的变化,同时改变风力机发出的功率。因此,如果转子速度相对于风速变化做出改变,则可以将最终速度比保持在最佳点,这可以通过以速度参考值来操作涡轮机而实现最大功率提取
(3)
风力机产生的扭矩可以用(1)和(2)表示
(4)
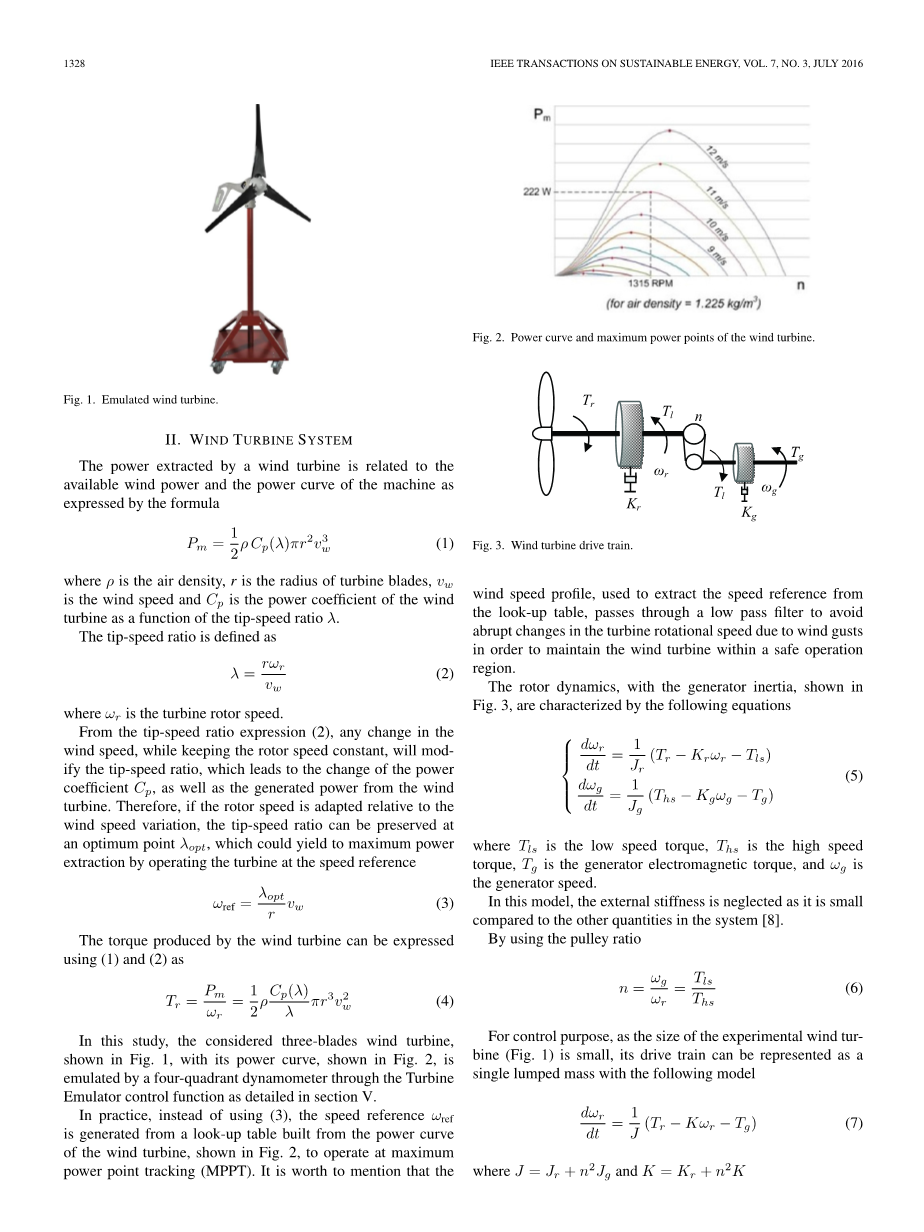
在本研究中,探究的是三叶片风力发电机,如图1所示。其功率曲线如图2所示。由四象限测力计通过涡轮仿真器控制功能进行仿真,详见第五节。
在实践中,为了实现最大风力追踪,速度基准是从由风力机的功率曲线中查表产生的,如图2所示,而不是使用公式3。
图2 风力发电机的功率曲线和最大功率点。
图3 风力发电机组。
值得一提的是用于从查找表中提取速度参考值的风速分布通过低通滤波器,以避免由于阵风引起的涡轮转速的突然变化,以将风力涡轮机保持在安全的操作区域内。
转子动力学模型和发电机惯性原理,,如图3所示。其特征在于以下等式:
(5)
其中是低速转矩,是高速转矩,是发电机电磁转矩,是发电机转速。
在这个模型中,外部刚度被忽略,因为与系统中的其他数量相比很小[8]。
通过使用滑轮比:
(6)
为了实现控制目的,因为实验风力发电机(图1)的尺寸小,其传动系统可以表示为具有以下模型的单个集总质量
(7)
其中
三: 二阶滑模速度控制
A.控制设计
考虑在单输入单输出线性系统下表示的转子动态数学模型如(7)所述,得到如下公式。
(8)
其中,Tg是输入转矩命令;A=K/J和B=1/J是风力涡轮机转子参数;d=Tr/J是风力涡轮机转矩在风速变化情况下的未知边界扰动量。
控制器的目标就是追踪速度参考如下
(9)
其中是速度参考. 速度跟踪误差的动态由下面公式给出
其中是速度参考. e是速度跟踪误差
速度追踪的动态误差由下面公式给出
(10)
其中u是新的控制输入,公式给出如下:
(11)
下面的二阶滑模控制策略被考虑用于速度控制和干扰消除
(12)
其中k1和k2是正常数。
从(11)和(12)可以得出跟踪速度给定的系统(8)的命令
从式(11)和(12),式(8)中系统的参考命令信号Tg可以得出跟踪速度给定如下式所示
(13)
B.模型不确定性和鲁棒性
我们考虑系统(8)式中的不确定性如下
(14)
其中是参数不确定性,xi;是任何外部的扰动。
等式(14)可以被重组如下
(15)
其中:
(16)
新的扰动项d *包括参数不确定性、未建模的数量和任何外部干扰。滑动模式控制器(13)将抑制有界的扰动。
为了考虑系统的物理限制及其在运行过程中的行为,引入了以下假设
假设1:转子加速度和速度的界限限制
(17)
其中分别是速度和加速度的已知最大值。
假设2:转子动态数学模型(7)中的参数在有界参数不确定下的不确定性,如
(18)
其中上方符号“ - ”表示标称值,Delta;是其不确定符号,delta;(·)是已知的正常数边界。 参数变化使得实际参数的值保持为正值。
假设2:风力涡轮机扭矩未知,但其限制如下:
(19)
其中是已知的正常数
假设3:从假设1和2可以看出,包括未知涡轮转矩,参数不确定性和外部干扰的扰动d *
假设3:从假设1和2可以假定摄动d *,包括涡轮未知转矩,参数不确定性和外部干扰,其边界如下
(20)
其中delta;是已知的正常数。
控制律(13)将确保不确定情况下的鲁棒性,例如由风速变化引起的参数变化和涡轮转矩不明确。 此外,在其结构中的积分作用允许零稳态跟踪误差。
C.稳定性分析
式(10)和(12),闭环系统由下式给出
(21)
我们定义以下Lyapunov函数
(22)
Lyapunov函数公式(22)意味着
(12)结果的时间导数结果如下
(23)
其中
如[7]所示,应用(20)中的扰动,可以看出
(24)
如果gt;0,将被忽略。如果增益满足要求则有效。
(25)
因此根据(20)的有界扰动,和可以很容易得出。
D.发电机侧控制系统
风力机与永磁同步发电机(PMSG)相连; 因此,电磁转矩具有以下表达式
(26)
其中是定子电流的q轴分量,是永磁铁磁链,p是极对数和(电感的d-q轴分量)由于定子绕组对称。
发电机定子电流应用矢量控制策略,分别控制d-q轴。其中q轴电流参考从(26)和(13)得出,
(27)
矢量控制策略由两个比例积分(PI)控制器用于d-q定子电流调节,以跟踪=0和=(27),详细信息可以在以前的工作中找到[20]。完整的发电机侧控制系统,包括速度滑模控制和矢量控制,如图4所示。
总结:
本文对二阶滑模控制策略进行了研究,以解决在最大功率提取下同时控制转速和直流侧电压的变速风能转换系统的问题。 控制策略在系统中具有很强的抵抗力,参数变化和不确定性。 风能转换系统的实验平台被用来验证控制器,实验结果表明了控制策略的有效性和鲁棒性。
参考文献:
[1] M. Chinchilla, S. Arnaltes, and J.C. Burgos, “Control of permanentmagnet generators applied to variable-speed wind-energy systems connected to the grid,” IEEE Trans. Energy Convers., vol. 21, no. 1, pp. 130–135, Mar. 2006.
[2] I. Munteanu, S. Bacha, A. I. Bratcu, J. Guiraud, and D. Roye, “Energyreliability optimization of wind energy conversion systems by sliding modecontrol,”IEEETrans.EnergyConvers.,vol.23,no.3,pp.975–985, Sep. 2008.
[3] Y. Yang, K.-T. Mok, S.-C. Tan, and S. Y. R. Hui, “Nonlinear dynamic power tracking of low-power wind energy conversion system,” IEEE Trans. Power Electron., vol. 30, no. 9, pp. 5223–5236, Sep. 2015.
[4] F. D. Bianchi, H. de Battista, and R. J. Mantz, Wind Turbine Control Systems. Principles, Modelling and Gain Scheduling Design. New York, NY, USA: Springer, 2007.
[5] G. Bartolini, A. Ferrara, and E. Usai, “Chattering avoidance by second order sliding mode control,” IEEE Trans. Autom. Contr
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[27542],资料为PDF文档或Word文档,PDF文档可免费转换为Word
您可能感兴趣的文章
- 饮用水微生物群:一个全面的时空研究,以监测巴黎供水系统的水质外文翻译资料
- 步进电机控制和摩擦模型对复杂机械系统精确定位的影响外文翻译资料
- 具有温湿度控制的开式阴极PEM燃料电池性能的提升外文翻译资料
- 警报定时系统对驾驶员行为的影响:调查驾驶员信任的差异以及根据警报定时对警报的响应外文翻译资料
- 门禁系统的零知识认证解决方案外文翻译资料
- 车辆废气及室外环境中悬浮微粒中有机磷的含量—-个案研究外文翻译资料
- ZigBee协议对城市风力涡轮机的无线监控: 支持应用软件和传感器模块外文翻译资料
- ZigBee系统在医疗保健中提供位置信息和传感器数据传输的方案外文翻译资料
- 基于PLC的模糊控制器在污水处理系统中的应用外文翻译资料
- 光伏并联最大功率点跟踪系统独立应用程序外文翻译资料


