
英语原文共 10 页,剩余内容已隐藏,支付完成后下载完整资料
本科生毕业论文(设计)
文献翻译
英文题目 Low—loss optical transversal programmable filter with symmetrical arrangement of cascade variable couplers using silica-based PLC
中文题目 运用硅基PLC的级联可变耦合器对称排列
实现的低损耗光学横向可编程滤波器
运用硅基PLC的级联可变耦合器对称排列实现的
低损耗光学横向可编程滤波器
Noritaka Matsubara*, Jyunichi Hasegawa, Haruki Urabe, Hiroshi Kawashima and Kazutaka Nara Fitel Photonics Laboratory. The Furukawa Electric Co.,Ltd.
6,Yawata-kaigandori, Ichihara, Chiba, 290-8555 Japan.
摘要
光学横向可编程滤波器是一种可以实现任意滤波器特性的电路,它还可以自适应地改变滤波器特性,因此是一种很有前途的设备。该滤波器由一个可以把输入光分成N条路径(抽头)的可变分束器、可变移相器、延迟线和一种结合分光输出变光器组成。我们可以通过设置任意抽头系数获得理想的滤波特性,并且可以通过可变分束器的对称布置和彼此可变组合最小化理论损失。然而,为了设置好抽头系数,有必要补偿制造误差以便能精确地控制电路特性。我们制作了带有监控波导的低损耗光学横向可编程滤波器,并且找到了一种新的方法,这种方法使用硅基PLC来调整电路特性并补偿制作误差。本文用一个光学横向可编程滤波器展示了三种滤波光谱结果,包括高斯线型波,平顶波形和一个低损耗纹波可调的平顶波形。
关键词:光学横向滤波器,可编程,对称,低损耗,可编程控制器
- 简介
快速增长的互联网流量数据需要扩展通信网络传输容量,即目前使用的波分复用(WDM)系统。为了满足不久的将来巨大的通信传输容量和网络动态重新分配的需求,波分复用系统将具有更高比特率并且更灵活。这种先进的WDM系统需要高性能的组件,包括一些可调设备,如各种可选波长滤波器、动态增益均衡器,可变色散补偿器。
光学可编程频率滤波器发展前途很好,因为它可以在一个电路中实现任意滤波器特性并自适应地改变这些滤波器特性。利用硅基平面光波电路的装置是实现该滤波器的几种方法之一(PLC),这种方法在高稳定性,高可靠性,和高可控性如阵列波导光栅(AWG)和热光开关方面具有显著优势。
有一种基于硅基可编程控制器的格型滤波器和横向滤波器。其中每个滤波器都是有限脉冲响应(FIR)滤波器的一部分,一般包括配置有多个Mach-Zehnder干涉仪(MZI)的n个部分(称为抽头)。
在这些滤波器中,我们可以根据任意抽头系数得到理想的滤波器特性。格型滤波器由2个输入端口,串联抽头和2个输出端口组成。该滤波器理论上可以损失极少的信号。然而,电路参数和抽头系数不是一一对应的,导致根据抽头系数确定电路参数的步骤很复杂。另一方面,横向的滤波器由分束器、并联抽头以及合路器组成。基于这种并联的配置,电路参数与抽头系数一一对应,我们还可以很容易地增加抽头数。因此,由抽头系数确定电路参数的步骤是十分简单的,并且该滤波器还有一个扩展优势,就是可以达到高分辨率。此外,它可以通过分束器的对称性和相互组合的设计方法最小化理论损耗。然而,在任何情况下,每个抽头都要添加监测波导,这是因为为了能精确地设置抽头系数,有必要调整电路特性,并补偿制造误差,这使得插入损耗很大。因此,低损耗的光学可编程滤波器应用需求很大。
本文中,我们制作了带有监控波导的低损耗光学横向可编程滤波器,并且发明了一种使用硅基可编程控制器调整电路特性和补偿制造误差的方法。此外,我们用一个光学横向可编程滤波器展示了三种滤波器结果,包括高斯线型波,平顶波形和一个低损耗纹波可调平顶波形。
2.光学横向可编程滤波器的结构
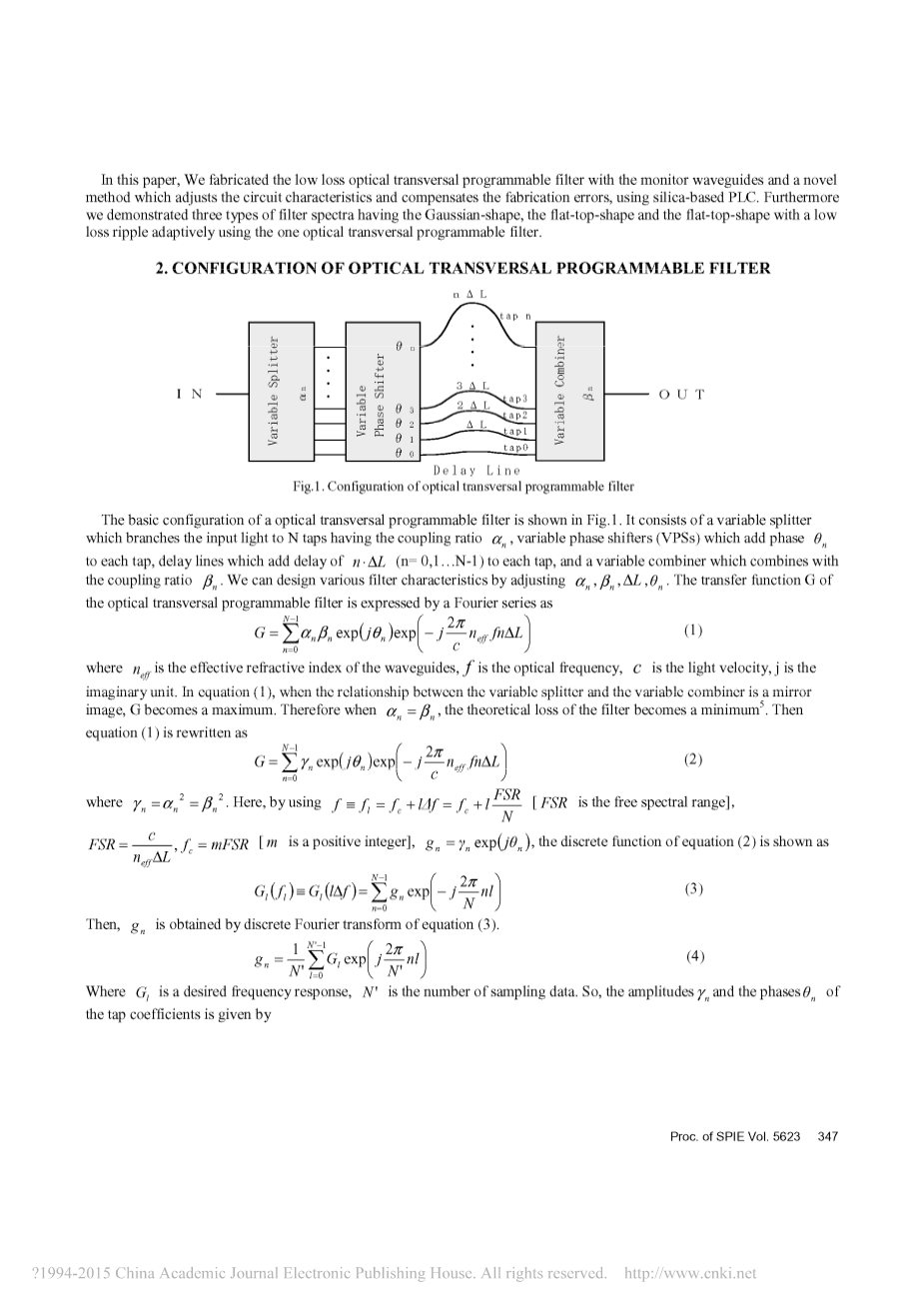
图1.光学横向可编程滤波器的结构
光学横向可编程滤波器的基本结构如图1所示。它由可变分束器、可变移相器、延迟线和可变合路器组成。其中,可变分束器把输入光分成N个耦合比为的抽头,可变移相器将所有抽头相位增加,延迟线将每个抽头延迟n-Delta;L(n=0,1hellip;N-1),可变合路器在耦合比为的基础上汇合所有抽头。我们可以通过改变,,Delta;L,的值来调整滤波器特性。光学横向可编程滤波器的传输函数G分为以下四步:
其中是波长的有效折射率,f是光频率,c是光速,j是虚数单位。在等式(1)中,当可变分束器和可变合路器之间为镜像关系,G取得最大值。因此当=时,滤波器的理论损耗值最小。由此方程(1)可改写为:
其中==,结合fequiv;-lDelta;f -l [FSR是自由光谱区],FSR=,m为正整数),g=exp(j),等式(2)的离散函数如下所示:
然后,可由等式(3)的离散傅立叶变化的到:
其中,是理想频率响应,Nrsquo;是抽样数,所以,抽头系数的振幅和相位可由以下方程得到:
上述方程中,为了实现线性相位特性,使抽头数为-(N-1)/2le;nle;(N-1)/2(N为奇数),-N/2le;nle;N/2(N为偶数)。
3.电路设计与制作
图2.光学横向可编程滤波器的设计图 图3.相位补偿器的结构
PLC型光学横向可编程滤波器的电路结构如图2所示。它有三个部分。第一部分是可变分束器,第二部分是带有延迟线(VPS)的可变移相器,第三部分是可变合路器。
可变分束器和可变合路器是镜像对称性设计的。它们由相同的采用MZI三级级联的可变耦合器(VC)组成。在这个电路中,我们可以通过添加可变耦合器的级联数简易地增加抽头数。随着抽头数的增加,虽然滤波器的分辨率逐渐变高,但同时设置抽头系数逐渐变难,电路体积也逐渐变大。因此,我们使用了8个抽头,以保持分辨率和电路制作难度的平衡。该电路通过监控波导来调整电路特性,监控波导将VC没有连接的端口连接到PLC芯片末端。
VC的耦合比和VPS的相位可以根据图3中所示的驱动热光(TO)相位控制器区分。它由波导上的薄膜加热器和加热器周围的沟槽组成。沟槽能减少热扩散和相邻波导之间的热串扰。
我们使用硅基PLC通过结合火焰水解法(FHD)和反应离子刻蚀法(RIE)制作这个电路。制作期间薄膜加热器沉积在波导里,同时沟槽在加热器四周形成。核心尺寸和波导的相对折射率差分别为6.5times;6.5mu;和0.8%。芯片尺寸为74.5times;9毫米。FSR的滤波器频率是44.3THz,Delta;L值为37.3mu;m。
4.可变耦合器与可变移相器的调整与补偿
根据方程(2),正是为了获得光学横向可编程滤波器的理想滤波特性,并建立具有对称特性的可变分束器和目的在于减少理论损失的可变合路器,必须要控制抽头系数。因此有必要精确调整VC和VP的特性参数。然而,相位控制器轻微的制造误差都能导致VC和VP的特性参数偏离设计值。因此,为了补偿误差并实现所需的特性,掌握VC和VP详细的实际特点非常重要。
首先,我们使用监测波导测量了每一个实际可变特性。然后,利用监测所得的特性建立了抽头系数,实现了低损耗的光学横向可编程滤波器。本节说明测量和补偿误差的步骤。
4.1可变移相器特性的测量步骤
图4.VC1处的光束被分割成的几个路径
首先,我们分析了用于测量图4所示的VC1耦合比的步骤。在VC1处,端口A处的输入光被分成两路,分开的光束重新在VC6处汇聚。因此从两个中央端口(端口4rsquo;,5rsquo;)输出的输出光也包括了VC1处的两束分开的光,并导致这些光束的功率不能直接表明VC1处的耦合比。另一方面,其他端口产生的输出光(端口1rsquo;- 3rsquo;,6rsquo;- 8rsquo;)只包括在VC1处分散的其中一束光,因此这些端口的光束功率能直接表明VC1处的耦合比。因此,为了简化分析,我们应该使用后者的端口(端口1rsquo;- 3rsquo;,6rsquo;- 8rsquo;)来衡量VC1的特点。
图5.VC1、VC2和VC3的测量路径
在这里,我们使用图5所示的路径(从端口A到端口8)来测量VC1,这是输出端口(1rsquo;-3rsquo;,6rsquo; - 8rsquo;)中最短的路径。图6是这条VC1驱动路径的透射率,通过将这些结果换算成归一化透射率,我们可以得到如图7所示的驱动能量和耦合比之间的关系。以同样的方式,
我们可以获得使用图7中所示路径得到的图5所示的VC2的特性。
其次,很不幸,VC3没有上述所说的端口。所以,我们通过设置耦合比为0将VC4作为直波导来测量VC3。图8所示是使用图5中的路径(从端口C到端口8)得到的透射率。
当透射率与波长无关,我们可以确定驱动功率P0(= 150MW)。通过驱动VC3并将VC4的驱动功率设置为P0,,我们可以测量类似于图6的图9所示的透射率。同时我们也能够得到VC3的特点。
其他任何VC都可以用类似测量VC1,VC2,VC3的方法来测量。
图6.驱动VC1得到的透射率(端口A到8) 图7.驱动VC1得到的耦合比
图8. 驱动VC3得到的透射率(端口C到8) 图9.驱动VC3并且VC4频率为P0时的
透射率(端口C到8)
4.3测量移相器特性和相位误差补偿值的步骤
图10. 移相器特性和相位误差补偿值的测量路径
为了得到VPS和相位误差的特点,用VC引导输入光进入每两个相邻抽头并测量输出功率。例如,使用如图10所示的从端口A到端口A的路径(基于4.1设置),我们可以得到VPS0,VPS1和下面两个抽头之间的相位误差。在这里,图10中路径的理论透射率,可以在如下方程(2)中得到,设N=2,,
此外,考虑到相位误差delta;,对于每个抽头,方程(6)可以改写为
考虑到方程(7)中抽头的相位,抽头0和抽头1之间的相位差可以表示为:
根据以上:
因此,我们可以得到的相移偏移值和相位误差delta;。
图11展示了使用图10的路径同时驱动VPS1所得的发射光谱。由方程(9)可知,随着VPS1的相移,光谱转移波长也越长。由图11所示的光谱位移值,我们能得到图12所示的驱动频率和相移之间的关系。同理,这也适用于其他两个相邻的抽头((n,n 1)(0,1),(1,2),(2,3),,,(6,7)),两个相邻抽头之间的相位区别由以下方程可得
由上可知,我们能得到任意相位偏移值和任意相位误差delta;。接着,通过测量两个相邻抽头之间的透射率,我们获得类似于VPS1的其他任意移相器(VPS0,VPS2-VPS7)的特点。
图11.驱动VPS1所得光谱 图12.驱动VPS1所得相移
图13.不补偿相位误差所得光谱(端口A到Arsquo;) 图14.驱动移相器补偿相位误差
光谱(端口A到Arsquo;)
然后,通过使用这些特性,可以实现相位误差补偿delta;,如下。图13展示了不驱动移相器的情况下,两个相邻抽头((n,n 1)=(0,1),(1,2),(2,3),,,(6,7))的发射光谱。这些光谱彼此都不相关,这意味着方程(10)中的两个相位差彼此不一致,如下所示:
不驱动移相器,假设方程(11)中
这说明相位误差区别delta;的值彼此并不相等,我们可以改变光谱并通过驱动VPS让他们彼此具有一定的联系。然后,为了补偿这些相位误差区别,便有了如下关系式:
简化为:
这个等式表明我们可以通过驱动VPS来补偿相位误差。经过相位误差补偿的发射光谱如图14所示。比起图13中的光谱,图14中的光谱彼此间有了很大的相关性。
4.3确认可变耦合器和可变移相器调整补偿无误
然后,为了确认4.1和4.2章节中的VC和VPS都已经调整补偿无误,我们通过改变抽头数量(N=8,4,2,1)来产生光谱。图15是计算所得光谱,图16是调整补偿VC后的测量所得光谱,图17是调整
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[30732],资料为PDF文档或Word文档,PDF文档可免费转换为Word
您可能感兴趣的文章
- 饮用水微生物群:一个全面的时空研究,以监测巴黎供水系统的水质外文翻译资料
- 步进电机控制和摩擦模型对复杂机械系统精确定位的影响外文翻译资料
- 具有温湿度控制的开式阴极PEM燃料电池性能的提升外文翻译资料
- 警报定时系统对驾驶员行为的影响:调查驾驶员信任的差异以及根据警报定时对警报的响应外文翻译资料
- 门禁系统的零知识认证解决方案外文翻译资料
- 车辆废气及室外环境中悬浮微粒中有机磷的含量—-个案研究外文翻译资料
- ZigBee协议对城市风力涡轮机的无线监控: 支持应用软件和传感器模块外文翻译资料
- ZigBee系统在医疗保健中提供位置信息和传感器数据传输的方案外文翻译资料
- 基于PLC的模糊控制器在污水处理系统中的应用外文翻译资料
- 光伏并联最大功率点跟踪系统独立应用程序外文翻译资料


