
英语原文共 3 页,剩余内容已隐藏,支付完成后下载完整资料
狭缝条纹管成像激光雷达对海洋表面波和水下目标探测成像的实验研究
Jian Gaoa,lowast;, Jianfeng Suna, Qi Wanga,b
a National Key Institute of Tunable Laser Technology, Harbin Institute of Technology, Harbin 150001, China
b Harbin Institute of Technology, Weihai 264200, China
a r t i c l e i n f o 摘要
Article history:
Received 25 November 2013
Accepted 5 May 2014
关键词:
条纹管成像激光雷达成像
激光雷达
海洋表面水下探测本文描述了一种利用条纹管相机作为接收器来探测海洋学、水下目标和海岸测量中的短尺度表面波场的灰烬激光雷达成像技术。该系统可以通过从海面和目标表面反射的光来提供短尺度海浪和水下目标的距离和强度成像。通过表面散射模型,可以提取出更精确的范围和强度信息。该技术可应用于高分辨率的水面波测量和水下目标检测。将该技术应用于舰载条纹管成像激光雷达(STIL)在黄海、东海和南海采集的数据,证明了该技术的可行性。
copy; 2014 Elsevier GmbH. All rights reserved.
海洋表面波包含许多与洋流、水下地形、海风等有关的信息[1]。海洋表面及水下目标的海浪测量在海上航行安全中也扮演着重要的角色,许多发达国家都认识到了这一点[2]。条纹管成像激光雷达(STIL)目前已成功证明其独特的能力,为陆地(高分辨率3D建筑物成像,陆地测绘)和海岸应用(水下航行器,船舶探测,浅水测深测绘,hi)提供有价值的高分辨率信息。GH分辨率风ELDs,近海波ELDS测量,水下目标探测)〔3〕。
如图1所示,两套灰灰激光雷达使用条纹管相机作为接收器。国家可调谐激光技术重点研究所、哈尔滨理工大学研制了测量海洋表面波和水下目标的能力。
STIL是一种很有前景的成像系统,具有高帧频和空间分辨率[4,7]。接收器是一个条纹桶相机,它是一个瞬时光学装置。来自海洋表面或水下目标的反射光通过传统透镜被收集到条纹管光电阴极前面的狭缝上,时间(范围)通过条纹管内的静电扫描来分辨从而在每个激光脉冲上产生二维距离方位图像。
lowast; Corresponding author at: No. 2, Yikuang Street, Nangang Area, Harbin City, Heilongjiang Province, China. Tel.: 86 18545883007; fax: 86 0451 86402920.
E-mail address: 59122892@163.com (J. Gao).
[5,6], 如图2所示。通过将扇形光束从船首定向到海洋,通过将激光脉冲重复频率(PRF)调整到船的前进速度,从而以推扫的方式扫过3D海洋表面和强度成像,来采样沿航迹的尺寸。图3示出安装在船上的STIL系统。
这种激光雷达的独特之处在于其高帧频和高分辨率的距离和强度成像。这是通过使用Nd:YAG激光器,可重复率高达100 Hz。考虑到一个脉冲的能量和数据采集的限制,激光器在100赫兹(表1)下工作,产生一个20/50兆焦耳的能量。因此,在测量过程中,可以在每个方向上集成足够的激光束和狭缝条纹管相机。
在2010年黄海试验中,STIL定位于小石岛附近船头(37.50_N,122.17_E),测量了海面波场。如图4(a)所示,有海洋表面波的三维成像该颜色显示海浪的波高(-2m到2m),距离分辨率为0.05m。该系统还具有探测水下航行器、海浪、海风等引起的短尺度表面波(波高约0.2m)的能力。通过STIL对短尺度波的探测,反演风速,识别水下是否有航行器。图4(b)示出了海洋表面波场的强度成像。灰度显示海洋表面的重新入射光的强度。它有助于区分海面上的物体,如泡沫、浮油、海冰等。
http://dx.doi.org/10.1016/j.ijleo.2014.05.005
0030-4026/copy; 2014 Elsevier GmbH. All rights reserved.
5200 J. Gao et al. / Optik 125 (2014) 5199–5201
图1。条纹管成像激光雷达.
图2。STIL的工作原理
图3。安装在船上的STIL成像系统。
2011年在渤海进行的试验中,STIL定位于兴城市附近的船尾(40.50_N,120.50_E),测量了船舶尾流。
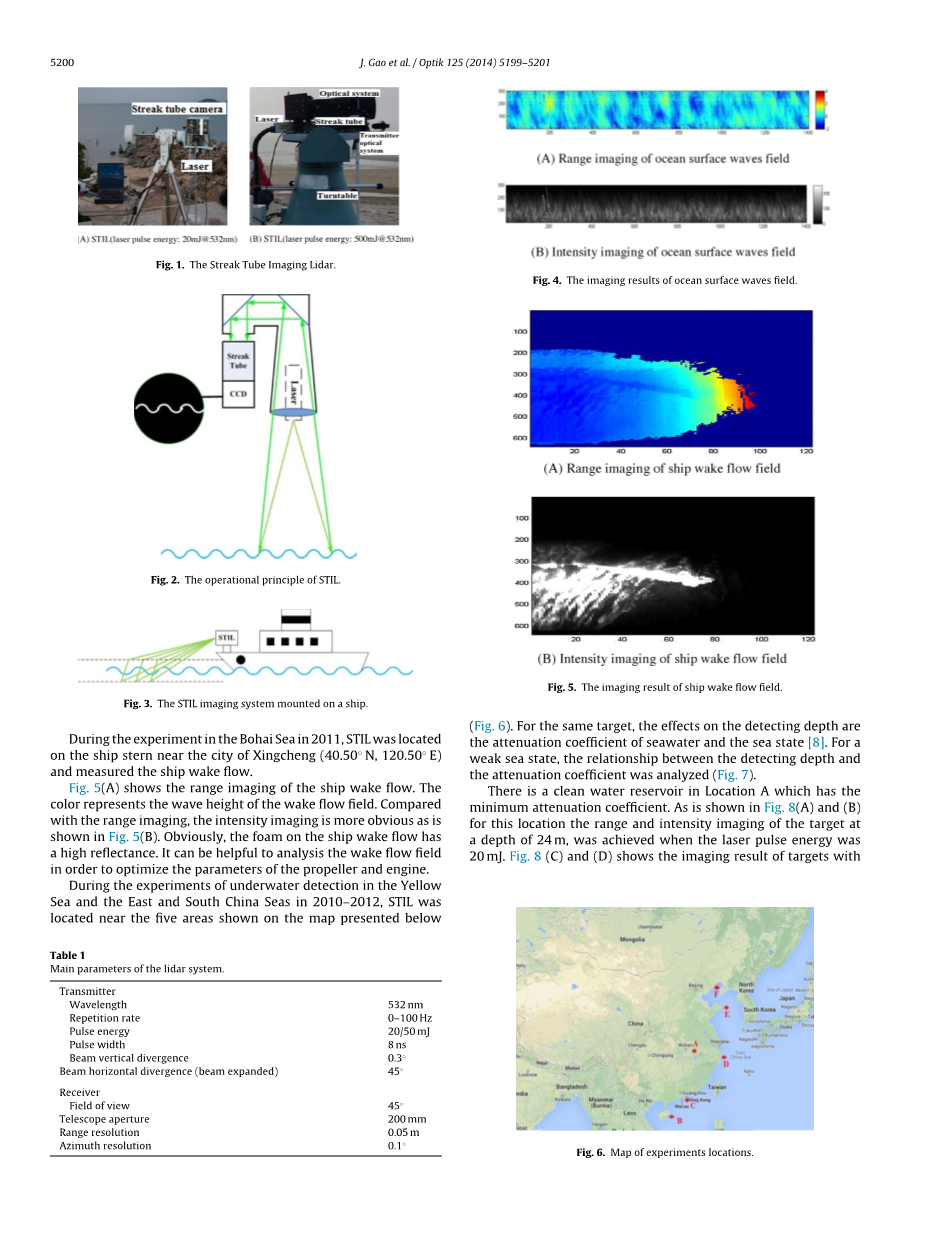
图5(a)示出了舰船尾流的距离成像。颜色代表尾流的波高。与距离成像相比,强度成像更为明显,如图5(b)所示。显然,舰船尾流上的泡沫具有很高的再膨胀率。对螺旋桨、发动机的尾流进行分析有助于螺旋桨、发动机的参数优化。
在2010-2012年的黄海、东海和南海水下探测实验中,STIL位于图6所示海域附近的5个区域。对于同一目标,海水衰减系数和海况对探测深度有影响,对于弱海况,分析了探测深度与衰减系数的关系。
Table 1
激光雷达系统的主要参数。
发射机
波长 532 nm
重复频率 0~100赫兹
脉冲能量 20/50兆焦耳
脉冲宽度 8 ns
光束垂直发散 0.3°
光束水平发散(光束扩展) 45°
接收机
视场 45°
望远镜孔径 200毫米
距离分辨率 0.05米
方位分辨率 0.1
图4。海洋表面波的成像结果
图5。舰船尾流的成像结果
在A处有一个具有最小衰减系数的洁净水储层。如图8(A)和(B)所示,对于该位置,当激光脉冲能量为20mJ时,实现了目标在24m深度处的距离和强度成像。图8(C)和(D)显示了深度为5m的目标的成像结果。通过强度成像,我们可以区分目标上的特征。
图6。实验地点地图
图8。水下目标A位置成像结果.
图9。水下目标B位置成像结果
图7。海水探测深度与衰减系数的关系
地点B在南海。海水水质较好。当激光脉冲能量为50mJ时,最大探测深度为18m。由于海风造成的海面粗糙的影响,成像质量变得更差(图9)。通过强度成像,不能识别目标,但在距离成像中可以区分目标。
综上所述,本文提出了一种基于条纹管探测器的新型激光雷达,用于海岸应用(海洋表面波场和水下目标的测量)。具有高帧频和分辨率的激光雷达成像与海洋表面波和舰船尾流都工作良好。该系统可成功地应用于水下障碍物的探测,以保证航道安全。在海洋遥感、海上搜救、探测潜艇等方面具有广阔的应用前景。
References
- W. Alpers, Theory of radar imaging of internal waves, Nature 314 (March (6008)) (1985) 245–247.
- V. Kerbaol, F. Collard, SAR-derived coastal and marine applications: from research to operational products, IEEE J. Ocean Eng. 30 (July (3)) (2005) 472–486.
- J. Sun, Q. Wang, 4-D image reconstruction for streak tube imaging lidar, Laser Phys. 19 (3) (2009) 502–504.
- J. Liu, Q. Wang, S. Li, et al., Research on a flash imaging Lidar based on a multiple- streak tube, Laser Phys. 19 (1) (2009) 115–120.
- W. Jinsong, C. Yuanli, X. Qiang, Imaging by single-slit
您可能感兴趣的文章
- 饮用水微生物群:一个全面的时空研究,以监测巴黎供水系统的水质外文翻译资料
- 步进电机控制和摩擦模型对复杂机械系统精确定位的影响外文翻译资料
- 具有温湿度控制的开式阴极PEM燃料电池性能的提升外文翻译资料
- 警报定时系统对驾驶员行为的影响:调查驾驶员信任的差异以及根据警报定时对警报的响应外文翻译资料
- 门禁系统的零知识认证解决方案外文翻译资料
- 车辆废气及室外环境中悬浮微粒中有机磷的含量—-个案研究外文翻译资料
- ZigBee协议对城市风力涡轮机的无线监控: 支持应用软件和传感器模块外文翻译资料
- ZigBee系统在医疗保健中提供位置信息和传感器数据传输的方案外文翻译资料
- 基于PLC的模糊控制器在污水处理系统中的应用外文翻译资料
- 光伏并联最大功率点跟踪系统独立应用程序外文翻译资料


