
英语原文共 8 页,剩余内容已隐藏,支付完成后下载完整资料
机械工程及自动化杂志3(2013)303-310
使用VFH 算法的机器人导航
Andrej Babinec, Anton Vitko, Frantiscaron;ek Duchoň and Martin Dekan
摘要:本文介绍了一种被动导航所控制的差异驱动机器人。这个导航的目的是基于无碰撞的行为去给机器人规定行为。反应式导航方法分析显示并没有可靠的无碰撞方法。然而,VFH 方法在静态环境中是反应式导航的次要选择。最早的方法是超声波测距仪。现在,有更多复杂的感应器可用。这就是为什么我们还要把镭射测距仪安装到室内移动的机器人上。在Matlab上仿真的结果和真实机器人实验的结果相同。基于这些实验,我们能够说VFH 在不同的感应器和环境中都是非常有效的方法并且它能被修改去适应不同的机器人要求。
关键词:移动机器人 导航 VFH 直方图 激光测距仪
1 引言
VFH (矢量场直方图) 是无功导航方法开发以减少势场方法的不足。那是在机器人运动传递时的振荡要通过一条走廊或障碍。原因是缺乏在仅仅一个阶段的综合矢量计算后有关布局障碍的信息。因此多个数据在直方图网格中的应用中减少。此网格可以也被称为当地的添加剂地图,方格中的值相应增加当障碍在相应的方向和距离被检测出来时。创造的直方图网格使用超声波传感器如图 1 所示。
VFH 方法的主要步骤如下: (1)在活动窗口中的直方图网格划分成角的部门; (2) 使极地直方图布局的检测到的障碍; (3) 发现进出的通道中设置的阈值的基础上的直方图和最后 (4) 选择最优的通道。
后来,新的改进的基本方法有开发了。第一种叫做 VFH 另外基本方法研讨动力学和机器人的尺寸。也是在改善选择的合力方向 [2]。下一个升级,VFH * 是相结合的无功导航和地方路径规划。它使机器人分析所有进出的通道通过议案的后果获得从直方图 [3]。
进一步在讨论中,我们提出实验结果与我们执行的室内移动机器人VFH 算法。因此,基本的将描述方法。原始的方法是为超声波传感器设计。仿真模型的有效性我们的机器人也使用超声波传感器的方法仿真。真正的移动机器人采用激光而不是为了显示声纳测距仪源的距离测量上的独立。
图一 通过测量更新直方图网格从超声波传感器 (空单元格包含零)。
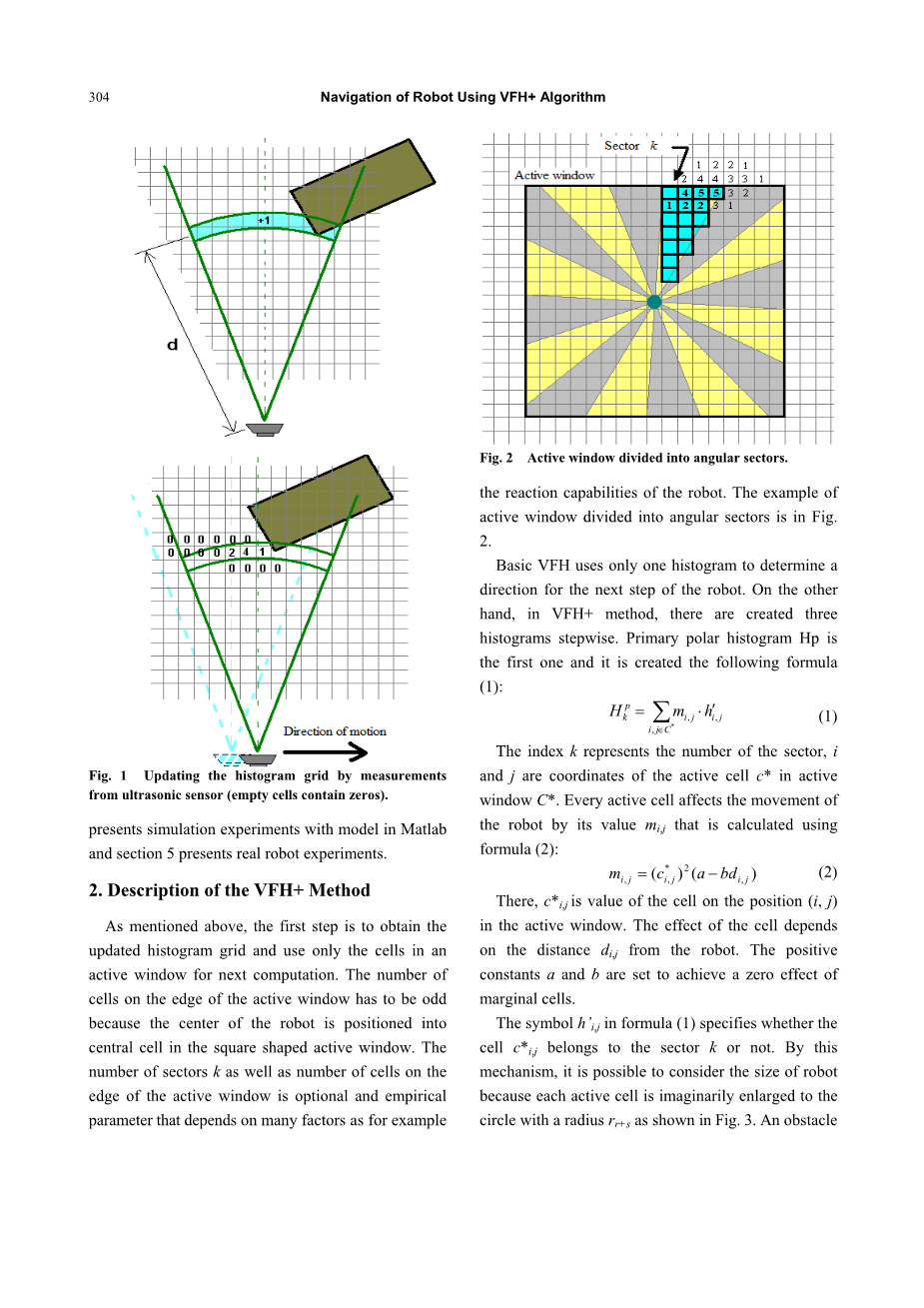
图二 活动窗口分为角的部门。
本文组织如下︰第2介绍了VFH 方法;第3节介绍了机器人和在我们的实验; 使用的机器人模型;第四部分提出了模型在 Matlab 仿真实验和第 5 节提出了实际机器人实验。
2 VFH 的方法描述
如上文所述,第一步是获取更新直方图网格和使用中的单元格下一次计算的的活动窗口。数目在活动窗口的边缘细胞已让人觉得奇怪因为机器人的中心定位在广场的中央细胞形活动窗口。数字的部门 k 上的单元格数目活动窗口的边缘是可选的实证参数,取决于许多因素,例如图 2 活动窗口分为角的部门。反应能力的机器人。示例活动窗口分为角部门是无花果。基本的 VFH 使用只有一个直方图来确定下一步的机器人的方向。另一方面手,VFH 方法,那里创建三个逐步的直方图。Hp 是初级极地直方图第一,它被创建下面的公式
索引 k 代表的部门,数我和 j 是坐标的活动单元格 c * 在主动窗口 C *。每一个活跃的细胞影响的运动该机器人由其值 mi,计算使用的 j公式 (2):
是(i,j)位置上的单元格的值在活动窗口中。单元格的效果取决于在距离 di,j 从机器人。积极的一面常数和 b 设置实现零影响边缘细胞。
符号 hi,j 在公式 (1) 指定是否单元格 c * i,j 属于部门 k 或不。通过这机制,它是可能考虑机器人的大小因为每个活动的单元格如扩大到具有半径的圆 rr s 如图 3 所示。一个障碍分子细胞是具有非零的活动单元格的名称值。
图三 障碍细胞体积增大
很明显,rr 是机器人半径和 ds代表一些机器人周围的安全距离。在为了参与小学极地机器人大小直方图的扩大角 gamma;i,j 计算。
因此,hi j 的计算如下︰
其中alpha;是角部门宽度和beta;i,j是角方向从细胞c*i,j在实际位置西,到 yj位置(x0,y0)机器人中心。
第二个直方图 Hb 称为二进制极地直方图和它被创建从主直方图使用两个阈值 tau;high,tau;low,用于确定是否部门是免费或被阻止。
在这种情况下,索引我指的实际步骤,因此,重视Hb 的算法k,i-1表示中的值部门k的二进制极地直方图确定上一步的算法。因此阈值让时间滞后。第三个直方图 Hm 涉及动态
约束的机器人和称为蒙面极地直方图。它是不可能改变方向立即为基本 VFH 的预期。真正的机器人以恒定的速度沿着圆圈移动同时改变方向,如图 4 所示。
因此,应用附加掩蔽的部门
二进制的直方图。戴着面具的直方图块不能达到无部门与实际机器人速度障碍的碰撞。为此有两侧形成的轨迹圆、图5所示的机器人的边。
这些圆圈 rl,rr,半径取决于速度该机器人。如果左的轨迹圆相交圆扩大后的障碍细胞,这之间的所有方向障碍细胞和向后运动的机器人阻止逆时针方向。同样的权利按顺时针方向被阻止圈但方向。这项任务是要检查每个障碍细胞 (与价值高于一些阈值 tau;) 交叉口和查找的限制
图4 理想和现实变化的方向与常数速度
图5 附加阻塞方向的例子
图6 (a)主要直方图(b)二进制直方图(c)戴着面具的直方图
phi;r,表示与最大值方向角度折允许从实际方向 theta; 向左转弯和右侧分别。然后蒙面极地直方图被创建下面的公式 (8):
所有三个直方图从图 5 是布局的图6所示。
之后,戴着面具的极地直方图,那里创造我们可以看到开口和遮挡的空间,在图 6 c。它是要选择几个部门要为候选人新的机器人的转向方向。为此目的我们区分两种类型的开口,狭窄和宽,通过设置的值的最大数目在狭窄的洞口挫伤的部门。一个候选人部门是选择在每个狭窄的洞口。两个在每一个宽阔的开放中选择候选人部门所以,每个人都是挫伤/2 部门遥远从左和右分别开放的边界。如果目标方向在一些开放的谎言,相应部门也是选定要新转向方向的人选那个机器人。如果有所有部门中阻止蒙面极地的直方图,它有必要降低的速度机器人和重新创建直方图。如果没有部门是免费的最低速度,机器人已停止立即的议案。
该方法的最后一步是选择最优从集合中候选人部门如果他们部选择。这可以通过成本最小化。
其中c是候选人部门,kt 是一个部门的目标方向,theta;i/alpha;是一个部门的实际机器人转向方向和kn,i-1是选择最优的部门上一步的算法。功能 Delta;(c1,c2)返回之间部门c1和c2的扇区的数目。乘数mu;1负责面向目标的选择Mu;2和mu;3关心平稳、顺利的轨迹。设置最小值的 g(c) 部门的方向要新转向机器人的方向[1-2]。
3 室内移动机器人
图 7 中所示的移动机器人系统设计与内置的 ICII (控制研究所和工业信息学) 和 ATEC 自动化有限公司 ICII 移动机器人系统是为室内环境设计的机箱设计只为平坦的表面,不为任障碍要克服。
图7 ICII 室内移动机器人、正视图、激光测距仪附加在前面的架子上
图8 移动机器人超声波和红外传感器周长放置。
图9 移动机器人模型 — — 差动式驱动。
包括两个驱动轮和一个脚轮(差动驱动)(图 8-9)[4].移动机器人传感器子系统包括 9 的超声波和红外传感器,7 传感器都具有相同的配置,放在机器人前面半圈和 2 传感器处于机器人后部 (图 8)。最新的组成部分ofsensor 子系统是激光测距仪放在水平的前台搁板的机器人 [5]。
Matlab 仿真模型︰为了做一些可用这必须做的模拟实验我们 ICII 移动机器人的适当模式的在 Matlab Simulink [6-7] 建立了运动学模型之后在图 9 中的示意图。然后它是连接到在图 10 中的控制方案在哪里转向角控制提供了P-控制器。驱动器被近似为一阶传递函数。提供了所需的方向留心从主要的 m 文件,在那里它被定期计算使用方法 VFH 。之后的一小步模拟了运动和状态变量了已保存,导致位置和实际角度返回到主程序中 m 文件为下一步计算所需的方向。
传感器子系统的机器人模型是由组成九个型号的理想化的超声波传感器。A在图 11 中,描述了这种传感器原理在哪里障碍检测为线条的交点从传感器和障碍的边界。然后检测作为一个最小的距离给出了距离四交叉路口和超声源。一个例子,用整个遥感环境传感器子系统如图 12 所示。黑色圆圈代表机器人,紫色线显示其实际值方向和黑点可视化检测到的距离每个传感器的障碍。这种模式总是检测的障碍,如果它发生在遥感的锥声呐和返回的真实距离。如果我们想要更现实的模型,一种非对称的模型超声波传感器可以用 [8]。
4 仿真实验
后准备的机器人,有些模型VFH 方法中使用的重要参数设置为以下值 ︰ 边缘中的单元格的大小直方图网格是 0.05 m,活跃的大小窗户是 37 times; 37 细胞和角数目部门是 72。在直方图的开放是认为是狭窄的如果它包含少于 14扇区。围绕机器人的安全距离设置为 0.15m,机器人最大速度是 0.1 m/s 和最后获得的新方向乘数被 mu;1 =mu;2 4 = 2 和 mu;3 = 1。
图10 仿真控制计划
图11 模型的传感器子系统传感环境。
图12 理想化的超声波传感器模型的原理
机器人是被迫去从起始点 (红星号) 穿过狭窄的目标 (红色圆圈)廊和一些为了模拟真实的开口环境,例如走廊和房间。的仿真结果显示在图13
图13 虚拟的路径的机器人中心和地图在运动过程中由超声波传感器。
图14 虚拟的路径的过程中机器人身体退避的障碍(蓝线)。
由超声波传感器的局部添加剂地图在机器人运动可以也见于图 13。
图15 取自实际机器人的路径、地图和直方图记录。
仿真结果表明该路径不是最优但不够光滑。存在的主要问题在于使用超声波传感器的数目很小,它们之间的大差距。他们也是太慢创建可靠的当地添加剂地图。
5 实际机器人导航
一个实际的传感器子系统是总是比差理想化的模拟的传感器子系统。有很多不准确和不可预知的错误,在测量使用仅超声波传感器不会一样光滑作为模拟中的路径。因此,激光
测距仪用于实际机器人实验。它提供快速测量大分辨率在全角的视图。它也是准确不够稳定状态。在运动过程中的操作受距离测量值,不是所有的事实一次,但按顺序。这可以在观察创建本地添加剂地图,主要是当机器人打开。但这不是重大的问题时该机器人执行 VFH 方法和最大值速度是足够低,因为该方法只使用本地添加剂地图活动窗口中的小部分。有都是新鲜和准确测量的在此窗口和存在的一些距离不准确之处只是一个不稳定状态。
环境的真正机器人导航实验准备好了要类似于仿真环境。真正的机器人了执行制作的记录的机制路径、 地图和还在实际点的直方图。有选择显示机器人的三种情况从开始到目标在图 15 中的运动。绿线是机器人中心轨迹和光的绿色区域是机器人身体运动轨迹。亮蓝色矩形代表活动窗口上,右手边可以发现实际的直方图。戴着面具的直方图中的红色圆圈是候选人部门和填充圆代表择最佳的部门。
很明显,真正的机器人用激光测距仪产生更平滑轨迹比模拟机器人与声呐。实际上,无论什么样的距离传感器用于 VFH 方法。唯一的重要如何精确地是更新直方图网格。
6 总结
事实上,尚无可靠无功无碰撞导航。这结果,特别是从的利用不准确的传感器,无法提供有关环境的准确信息。因此,在导航机器人此外应使用高层次的控制,其中将本地化环境中的机器人,检测陷阱情况下,计划机器人的行为。无功导航模块必须在关闭中高液位控制模块与合作。如果该机器人具有不无功导航模块,它不能够在环境中移动无碰撞。相反,如果机器人有不是的更高水平的控制,其操作的模块会不会有针对性。然而,它可以得出的结论,可以考虑 VFH 方法非常有效,它广泛使用可见一斑在移动机器人领域的科研人员。
参考文献
[1] J. Borenstein, Y. Koren, The vector field histogram—fast
obstacle avoidance for mobile robots, IEEE Transactions
on Robotic and Automation 7 (1991) 278-288.
[2] I. Ulrich, J. Borenstein, VFH : Reliable obstacle
avoidance f
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[148135],资料为PDF文档或Word文档,PDF文档可免费转换为Word
您可能感兴趣的文章
- 饮用水微生物群:一个全面的时空研究,以监测巴黎供水系统的水质外文翻译资料
- 步进电机控制和摩擦模型对复杂机械系统精确定位的影响外文翻译资料
- 具有温湿度控制的开式阴极PEM燃料电池性能的提升外文翻译资料
- 警报定时系统对驾驶员行为的影响:调查驾驶员信任的差异以及根据警报定时对警报的响应外文翻译资料
- 门禁系统的零知识认证解决方案外文翻译资料
- 车辆废气及室外环境中悬浮微粒中有机磷的含量—-个案研究外文翻译资料
- ZigBee协议对城市风力涡轮机的无线监控: 支持应用软件和传感器模块外文翻译资料
- ZigBee系统在医疗保健中提供位置信息和传感器数据传输的方案外文翻译资料
- 基于PLC的模糊控制器在污水处理系统中的应用外文翻译资料
- 光伏并联最大功率点跟踪系统独立应用程序外文翻译资料


