英语原文共 12 页,剩余内容已隐藏,支付完成后下载完整资料
中文原文
一个机器人结构设计及运动学
机械臂理论
KESHENG WANG and TERJE K . LIEN
生产工程实验室,NTH-SINTEF,N-7034,挪威特隆赫姆
在本文中,我们说明了具有六自由度机器人的机械手臂可以分为两个部分:以前三个关节相连的手臂为主要定和最后三个关节相连的手腕为主要方向。如果我们考虑连续的链接是平行或垂直的,只有12的臂和两个手腕结构可能是有用的和应用于不同的机器人机械手的机械设计。这种简化可以导致对手臂和手腕的不同组合配置相应的逆运动学算法,这对于一个机器人机械手逆运动学的数值解和封闭形式的解决方案提供了非常有效和简单的计算方法。
关键词:运动学 逆运动学 机械手臂 机器人
1 简介
一个机器人的机械手包括被接头连接在一起的一系列链接。机械手是机器人的手臂,它能够使机器人的手臂执行弯曲、延伸和旋转的动作,提供这些运动的是机械手的轴,即是所谓机器人的自由度。一个机器人能够有3~16轴,自由度一词则总是与机器人的轴数有关。在机器人的机械手设计,运动链的选择在控制器的设计过程中间尤为重要。
为了定位和定向的机器人末端执行器的任意,六个自由度有以下要求:三个自由度确定位置,另外三个自由度确定方向。每个机械手关节处可以提供一个自由度,因此如果他是在适当的位置和方向提供六个正交的自由度,那么,机械手至少需要六个关节点。
机械手的结构取决于关节点的不同组合。对于工业机器人的结构可能出现的变化可以确定如下:
;
其中:
V=数量的变化;
DF=自由度范围变化的数目;
这些因素表明,大量的不同的链接可以构造,例如六轴46656链是可能的。然而,大量数据也表明了它不适合运动的原因。
我们可以将一个机器人六自由度分为两部分:臂由前三个关节和相关链接;与手腕由后三节点和相关链接。之后运动链的变化将会极大地减少。即留置了手臂和手腕的结构。Line已经研究了手臂和手腕的结构,有20种不同的手臂和8种手腕设计。
在文本中,我们把20种不同的手臂和12种不同的手臂结构减缩为通用的12种手臂和5种手腕结构。最后我们得出这样的结论:五种手臂和两种手腕是商业工业机器人的基本结构。这种简化可能导致逆运动学的通用算法的配置,形成手臂和手腕的不同组合。
2 机器人的机械手结构设计
在本文中,对于最佳的和最简化的工作空间,我们假设如下:
(一)具有六个自由度的机器人可以分为两部分:连接组成的前三个关节和相关的连接被称之为臂;剩余的关节的连接和相关连接是所谓的手腕。
(二)两个链接是由一个联合低副连接。只有旋转和线性关节用于机器人机械手。
(三)关节轴是垂直或相互平行。
根据作者的文献,假设机械手适用于大多数的商业工业机器人。我们可以分别考虑它的手臂和手腕的结构。
2.1机器人的机械臂结构
- 图形表示。
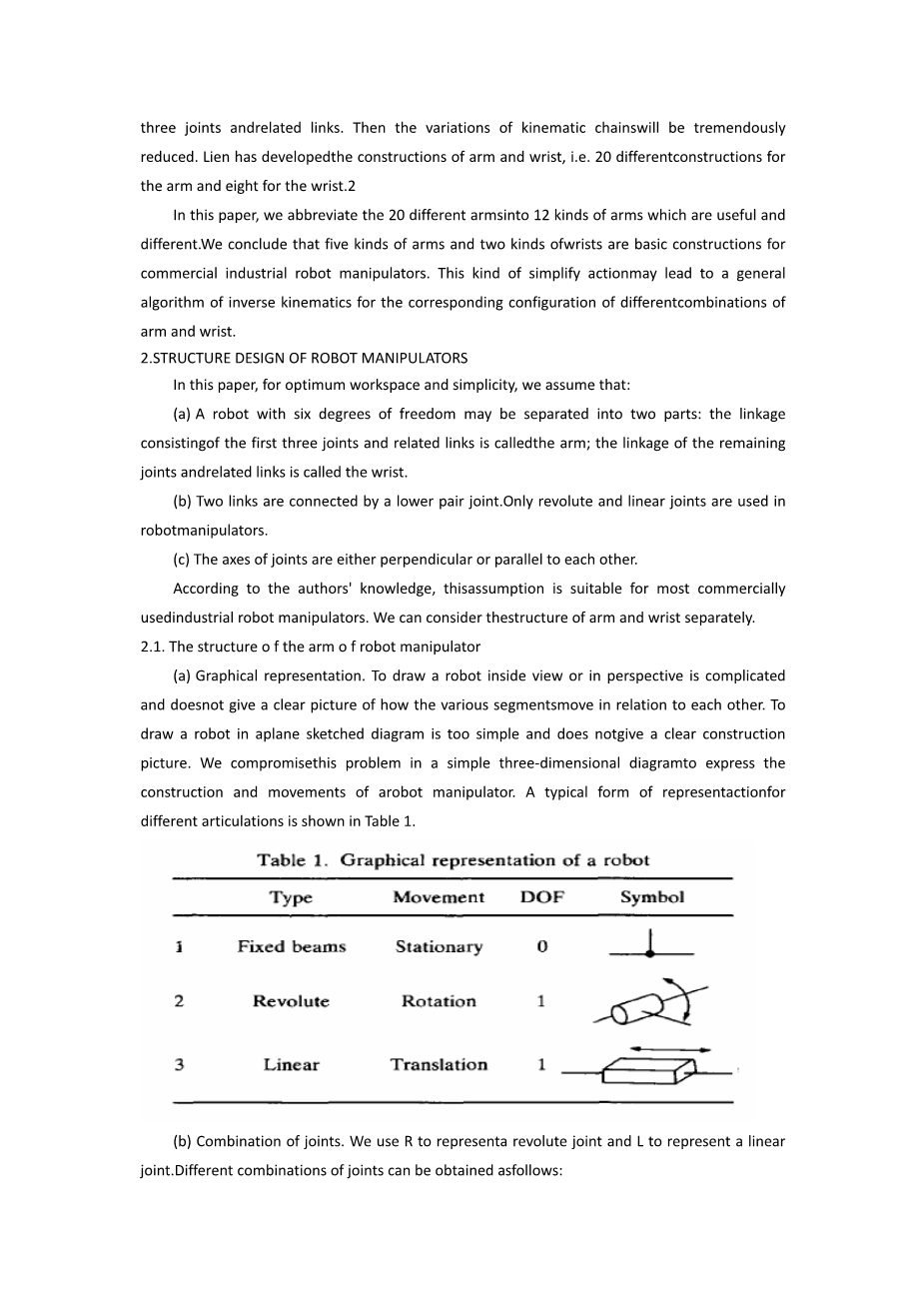
要画一个机器人的内部视图或透视图是复杂的,并没有给出各个部分如何相对移动的清晰的关系。在一个平面上画一个机器人图过于简单,但并没有给出一个明确的结构图。我们忽略这些问题,用一个简单的三维图表示机器人机械手的结构和运动,折中解决了这个问题。下表显示了对不同关节表示的一种典型形式:
表1 一个机器人的图形表示
|
类型 运动 自由度 符号 |
|
1. 固定梁 固定 0 |
|
2. 转动 旋转 1 |
|
3 线性 平动 1 |
- 关节的组合。
我们使用R来表示一个旋转接头和L代表一个线性接头。接头不同的组合可以得到如下:
|
1 2 3 4 5 6 7 8 |
|
RRR RRL RLR RLL LRR LRL LLR LLL |
根据与平行或垂直轴的不同组合,每一个组合有四种子组合。因此,可以构成以下32种组合:
(1) RRR Rperp;Rperp;R (2)RRL Rperp;Rperp;L
Rperp;R‖R Rperp;R‖L
R‖Rperp;R R‖Rperp;L
R‖R‖R R‖R‖L
(3) RLR Rperp;Lperp;R (4)RLL Rperp;Lperp;L
Rperp;L‖R Rperp;L‖L
R‖Lperp;R R‖Lperp;L
R‖L‖R R‖L‖L
(5) LRR Lperp;Rperp;R (6)LRL Lperp;Rperp;L
Lperp;R‖R Lperp;R‖L
L‖Rperp;R L‖Rperp;L
L‖R‖R L‖R‖L
(7) RRR Lperp;Lperp;R (8)RRL Lperp;Lperp;L
Lperp;L‖R Lperp;L‖L
L‖Lperp;R L‖Lperp;L
L‖L‖R L‖L‖L
如果第二节是一种线性组合并且其他两个关节垂直于它,那么,这两个关节之间的关系就被认为是平行或者垂直。
综上所述,一个简单的三节臂有36种可能的组合。36种可能的组合中有9种是一个或两个自由度。其余的7种都是平面机构,因此,有20种可能的空间简单的手臂。
让我们考虑一下 , 第一个关节允许绕垂直轴旋转,第二个关节是一个垂直的线性组合(即平行于第一)。而第三个关节是一个水平连接的关节(即垂直于第二)。这个手臂定义了一个典型的圆柱机器人。改变关节的顺序,无论是
a.垂直线性连接之前的旋转接头
b.垂直线性连接一个水平的接头
都将不会导致手臂的运动有变化。在这种情况下,有两个连接方式都与标准的圆柱联动是“等效”的。在所有这些两个或两个以上的等效机构存在的情况下,该组的代表将是平行于旋转关节的线性关节在中间的一个(关节中2号)。只计算一个连锁代表等同组将消除20个组合的8个。其余的12个类别的链接是用不同的图所表示的,如图1所示。我们获得相同的结果作为参考。
图1 手臂配置十二种类型。
- 五种基本类型的机械手的手臂。
虽然有12个有用的和不同的手臂结构可以被用在设计一个机器人机械手的手臂,在实践中,只有其中的一些是实用和常用的。在这些配置当中,有一些等效的情况。例如:如果我们关于Z轴把Z-X-Z手腕转动90°,那么它将会变成Z-Y-Z手腕。此外有不同的空间位置的配置也视为等价,例如:Y-Z-Y手腕可以等价为Y-Z-X手腕,因为如果关于Z轴把最后的关节旋转90°,我们可以得到相同的结构。在所有这些情况下,两个或两个以上的等效情况存在,那么我们可以把12种手臂配置减少到5种有用的配置,被用来设计机器人机械手的手腕。我们发现,大多数商业化的工业机器人可以根据一个机器人他们的手臂运动的外观和几何特性分成五组。五组可以分别定义如下,如图6所示。
图6 在目前使用的臂配置的五种主要类型,与括号中的百分比使用的指示。
1.笛卡尔(Lperp;Lperp;L)
2.圆柱(R‖Lperp;L)
3.球形(Rperp;Rperp; L)
4.旋转(Rperp;R‖R)
5.双柱(L‖L‖R)
在5种类型中,有2种手腕配置,如:Z-Y-Z和Y-X-Z,他们常常用于工业实践当中。X,Y,Z轴的序列会影响复杂的逆运动学的解决方案。
2.2一个机械手的手腕结构
- 关节类型。
我们用前三个关节,即机器人的机械臂的主要任务是完成定位。然后我们用后三个关节提供的三自由度的方向并参考相关的连接,作为手腕。由于刚性体的取向具有三个自由度,一个完整的机械手的手腕必须包含三个旋转接头,例如第一个绕X轴旋转,然后绕y轴,最后绕Z轴.
- 组合或关节和连接。
因为手腕的定位只有三个转动关节是简单的,它的组合是众多组合之一。从RRR的组合来看,它是非常简单的。我们知道四种排列组合中只有一种可用于完成机器人手腕的定位。是一个平面机构。和不能在三个自由度的定位表达机器人的手腕。所以只有Rperp;Rperp;R结构可以用来完成定位任务。
如果我们让X,Y,Z轴的顺序不同,我们可以得到多种手腕配置。但他们中的许多方式是“等效”的。我们只考虑第一和第三关节的关系:平行和垂直。两个不同的组合可以得到欧拉角和辊间距横摆角的表达式,证明如图2。X,Y,Z轴次序,但是,对你运动学求解的复杂性有影响。
图2 两种类型的手腕配置。
2.3机器人的典型结构
在工业实践中,我们可以用五种臂结构类型和两种手腕类型结合配置出10个不同种类的六自由度机器人的机械手。当然,我们也可以考虑其他十二种中臂结构中的其它7种与5种手腕类型中的一种来构造一个新的机器人机械手。但他们中的大多数都并没有应用在工业实践中。
3 逆运动学求解机器人
3.1 一般原则
找到一个机器人机械手的逆运动学方程起初似乎是一项艰巨的任务。但是,当把机器人分为两部分时,它就变得相对简单了。通过旋转接头连接在一起的机械手位置和方向之间的关系可以由迪纳维特哈坦伯格矩阵描述,如图3所示。
图3 D-H坐标系参数。
其中:表示第i个关节变量
表示第i个关节偏移量
表示第i个链接的长度
表示第i个链接的扭转角
机器人机械手的末端执行器的位置和方向的矩阵:
通过结合律矩阵可以重新集结成为两个子集,它们分别代表的是手臂和手腕:
其中
上标指定参考帧;一个代表的臂的前端和W代表;尖端的手腕,即对末端执行器的中心机械手。
°T为端部执行器可以写成4times;4齐次矩阵由一个方向子矩阵R和位置矢量p5.6。
我们可以得到向量的分析方法。细节将在下面提到:
从4式中可以得到如下方程:
我们可以得到三前三个关节变量就可以从以下方程算出:
机器人机械手的末端执行器的方向可以看作是手臂的方向和手腕方向的乘积:
从式(12)和(5),我们可以得到:
我们可以得到最后三个关节变量,,, 求解方程(13)。
3.2 不同的方法
对于机器人的机械手,有两种不同的解决方案:封闭形式解和数值解决方案。由于他们的迭代性质不同,数值解决方案通常比相应的封闭形式的解决方案慢得多,以至于在大多数应用中,我们对运动学求解的数值方法不感兴趣。但是,在一般情况下,数值算法比封闭形式的算法更容易得到的。
在本文中,我们提出了算法的两种解决方案。
(一)封闭形式的解决方案
在封闭形式解决方案中,问题
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[150385],资料为PDF文档或Word文档,PDF文档可免费转换为Word
您可能感兴趣的文章
- 饮用水微生物群:一个全面的时空研究,以监测巴黎供水系统的水质外文翻译资料
- 步进电机控制和摩擦模型对复杂机械系统精确定位的影响外文翻译资料
- 具有温湿度控制的开式阴极PEM燃料电池性能的提升外文翻译资料
- 警报定时系统对驾驶员行为的影响:调查驾驶员信任的差异以及根据警报定时对警报的响应外文翻译资料
- 门禁系统的零知识认证解决方案外文翻译资料
- 车辆废气及室外环境中悬浮微粒中有机磷的含量—-个案研究外文翻译资料
- ZigBee协议对城市风力涡轮机的无线监控: 支持应用软件和传感器模块外文翻译资料
- ZigBee系统在医疗保健中提供位置信息和传感器数据传输的方案外文翻译资料
- 基于PLC的模糊控制器在污水处理系统中的应用外文翻译资料
- 光伏并联最大功率点跟踪系统独立应用程序外文翻译资料


