
英语原文共 12 页,剩余内容已隐藏,支付完成后下载完整资料
加速度计和触觉传感器在机械手上的应用
摘要
Carlos Blanes*, Martin Mellado, Pablo Beltran
Instituto deAutomatica e Informaticalndustrial, UniversitatPolitecnica de Valencia, Edificio 8G, Acceso D, 3aPlanta, Camino de Vera s/n, 46022 Valencia, Spain
机械手上连接几个加速度计的气动夹持器已经被开发和测试。第一个机械爪是能够区分气缸在不同的工作化境下的硬度,估算气缸内部压力,夹持器的手指能监视的气缸执行件的位置和速度,从而研究气缸行动阶段抓取器与气缸的相对位置对气缸内部压力的影响。另一只机械手夹持器可以测定茄子和芒果的硬度,采取一个柔性的手法,即在夹子与手指中有一个充满流体的有不同配置的多自由度手指,使其硬度可通过对里面的颗粒流体干扰过渡到控制膜的手段来间接测量。评价茄子和芒果的硬度,避免产品和夹具之间的相对位置的影响,当产品被手指抓起来的时候,估计的硬度。为了使加速度计的性能更好的实现,手指采用颗粒流体。本文介绍了利用加速度计把不规则产品抓取并估算其硬度的气动夹持器的方法。 在同一时间, 它还研究了利用加速度计附着于不同的气动机器人夹持手指,提供作为触觉传感器的可能性。
关键词:触觉传感器 夹持器 硬度 挑选对象 加速度计
- 简介
人的手是能够根据他们的内部神经的触觉响应,小心地操纵着不同形状的产品在高速的分类。园艺产品包装大部分还是人为操纵,所以工业机器人在食品包装的方面有很大的潜力[1,2]。为了迎接这一挑战,机器人手爪能提升他们的速度来处理不规则的产品,并纳入可靠和强大的触觉传感器。
对于一个夹持器,处理不规则的具有不同形状的产品是一个具有挑战性的任务,特别是,如果产品是敏感的,像一些水果或蔬菜,利用不同的方法试图达到必要的灵巧。机械手通过传感器和控制系统寻求接近于人类手的自由度与复杂的机制。一般来说,他们会过于复杂,无法达到所需的速度,可靠性和成本,以实现工业要求[3]。简单的机制和控制夹具是必需的。欠驱动机器人机制减少驱动器、不降低机械手指的自由度,提高灵活性来适应不同的产品形状[4]。开发机器人的手可以使用欠驱动[5],即使在一些工业应用中也一样[6]。欠驱动机构的设计需要进行大量的工作,要找到最佳的解决方案[7],由于机械手的轨迹是非线性的,所以具体的算法是必要的,他们必须联系自己的队友一起共同合作完成[8]。
兼容的手指或夹持机构有助于抓取不规则的产品。手指用一种分布式兼容的硅橡胶制成的,可以适应不同的形状和表面的产品[9]。在机器人的手,有些情况可以发现一个完全兼容的机器人手[10],一个集中的标准在欠驱动机器人手上[11]或机器人手指的柔性执行器[12]。一些学者用测试手指覆盖着一个充气橡胶口袋的膜[13]。如果一个膜填充粒状材料,垫很容易适应的产品形状。用粒状材料填充的弹性膜的内部压力的控制已被用来调整其刚度的干扰过渡的装置。此属性具有很大的潜力在开发机器人夹持器领域[14],例如,利用这种技术可以开发一个通用夹具[15],干扰过渡可用于刚度可变的平行爪的手指[16,17]。
在机器人学,触觉传感器是一种设备或系统,该装置或系统可通过在传感器和对象之间的物理接触来测量物体或接触事件的属性[18]。机器人的触觉传感器可以是内置的,传感器不需要直接接触产品,但传感器在外部时则需要直接接触产品[19]。由于内部传感器与产品不直接接触,这可能会影响接收到的信号的质量。但实际上传感器被嵌入到内部可以避免由直接接触产品而造成损坏的风险,所以这个没有必要使用一个传感器阵列,达到了简化安装和控制的效果。尽管有了这些优势,它们中的大部分仍旧是外在的。导电硅橡胶已作为柔性关节[20]的一个内在传感器被嵌入在一个柔性夹持器[21]检测具有不同大小和方向的对象的存在。这种材料具有较高的滞后性,但其行为是可以预测的自适应神经模糊推理系统[22]。另一种可能性是低迟滞和拟线性行为内在传感器微机电设备的使用,负载细胞在连续体机器人的检测下评价产品的柔软性[23]。一个三轴加速度计安装在一个探头,幻灯片超过几个表面[24]是一个纹理感知传感器。类似的解决方案也被实施在一个人形机器人[25]。加速度计,在气动夹紧装置,可以监测其发生接触的瞬间,可结合力传感器或规范的抓力[26]。本文所用的传感器是通过一个在线算法分析的电流和电动马达驱动的夹持器[27]来排序水果。红外光敏三极管[28]和一个小的三轴力被用来开发一个嵌入式柔性和力传感器。一些外在的触觉传感器可以通过使用压电传感[29]与压力传感器[30]来评价产品的硬度。Drimus等人开发出了一种灵活的触觉压阻式传感器[31]可对橡胶的刚性和可变形物体的分类。在内在和外在的传感器之间,当内部传感器在气动[32]或磁驱动[33]下变形时,产品硬度也可以通过评估一个准静态的内在传感器,即位置传感器的位移来估算。压阻式传感器放置在手指可以让西红柿和辣椒按成熟度分类[34]。
本研究的目的是研究搬运机器人在信息产业上这种可以提出安装在机械手夹持器上的触觉传感器和加速度计这种技术的潜在用途。夹具使用加速度传感器来识别他们执行的行动阶段,把握对象的几种方法,提出对硬度测量所掌握的产品。硬度估计由加工减速时间在抓行动,由在第一个产品/手指接触的减速的严重程度,并由最高的12m/s的加速度峰值。这些方法可以推广到其他的夹持式机械手。
在一般的机器人初级包装过程中,机器人从传送带上挑选产品。产品的形状和方向和在输送带上的位置都能被计算机跟踪系统识别。即使有一个错误的产品定位,机器人抓取也能够掌握和感应出这样的产品,尽管这些不准确。一个特定的机器人夹持操作的开发,并考虑到这些不准确。手爪样机已经测试估计硬度的茄子和芒果。为了提高把握产品不同形状的夹持器的能力,他们有欠驱动运动或手指满能够颗粒材料垫手指干扰过渡。所有的夹子已经应用在ABB IRB 340机器人上进行测试了。
- 嵌入式加速度计机械爪
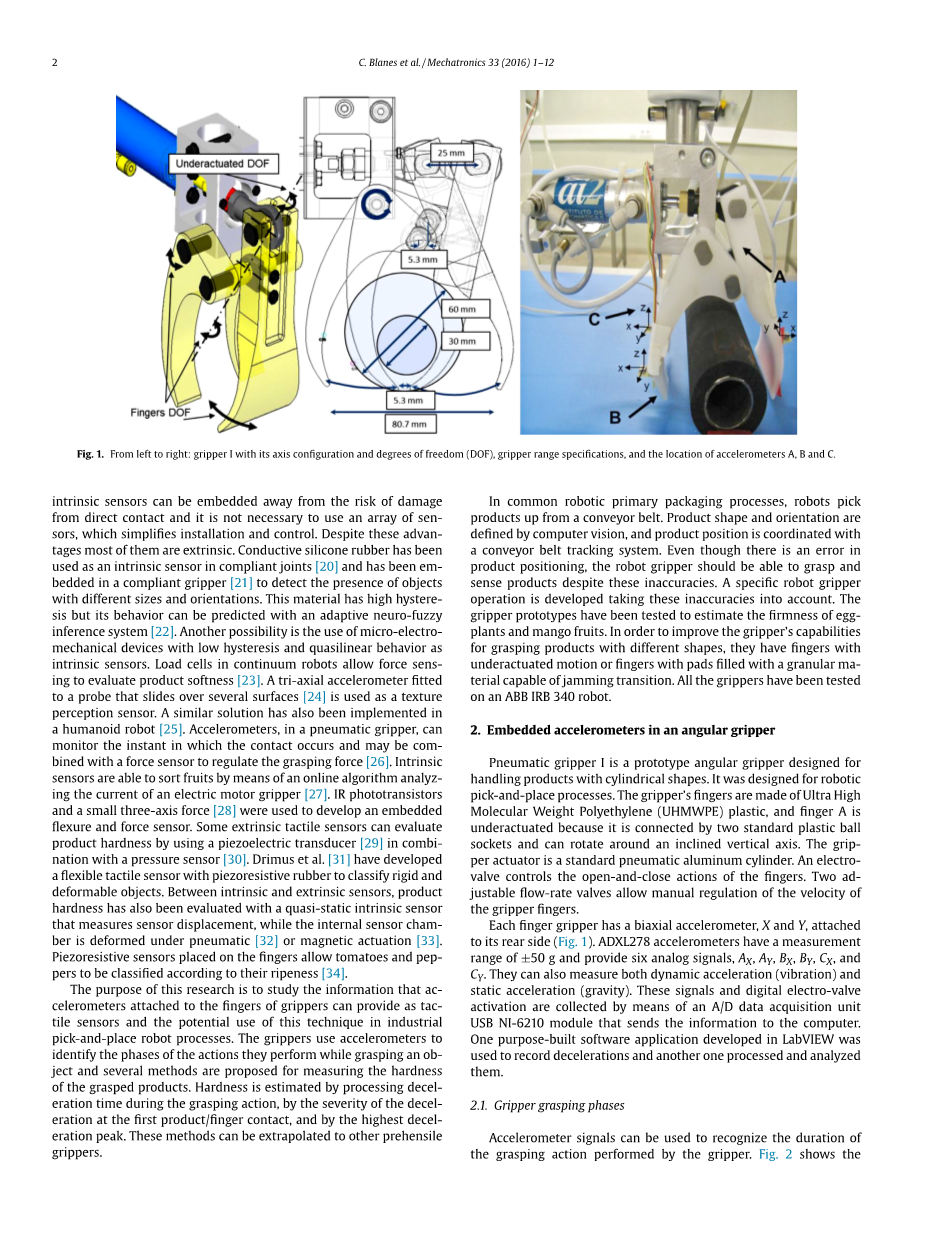
气动夹持器是一个角爪设计用于处理圆柱形状的产品的原型。它被设计用于机器人拾取和放置的过程,夹具的制作中的手指超高分子量聚乙烯(UHMWPE)塑料,和手指是一个欠驱动手指,因为它是由两个标准的塑料球插座连接并可绕垂直轴旋转的倾斜构成。GRI统计器是一个标准的气动铝筒,电磁阀控制手指的开闭动作,双可调流量阀允许手动调节速度夹持器的手指。
每一个手指夹持器有一个双轴加速度计,X线片,并附在其后侧(图1)。ADXL278加速度计具有测量范围士50 g和提供六个模拟信号,^ X、Y ^,BX,Cx和CY他们也可以测量动态加速度(振动)和静态加速度(重力)。这些信号和数字电磁阀激活由A/D数据采集手段收集USB NI-6210组成单元模块将信息发送到计算机。一个专用的软件应用开发软件LABVIEW是用来记录减速参数,另一个用来处理和分析他们。
图 1从左至右:夹持器与它的轴配置和自由度,夹持范围规格,以及加速度计的位置A和B和C
2.1抓取过程
加速度计信号可以用来识别的抓取动作执行的夹持器的时间。如图2,当夹持器抓着一个木缸时,安有加速度计的夹持器就会反应出手指B在X方向上的位置。当夹持动作在小于0.2S时,以下详细说明减速三个不同阶段。
(1)阶段1或逼近阶段。夹爪手指开始运动,并继续,直到它接触到物体。图2这一阶段大约是一个正弦阻尼加速度信号。流量计控制气动缸的速度,因此加速度波动,直到气缸达到额定转速。
(2)第二阶段。当产品与夹持器之间不存在相对运动时,所有的产品手指的影响收集到的最终接近和推动运动。在这个阶段,产品和手指之间的力量是小于当没有相对运动,如果在这个阶段的高速移动的机器人,该产品可能会落下或可能会移动工具中心点的夹持器。
- 第三阶段。动力直到一个静态平衡在产品和抓手指一起移动的欠阻尼运动。该产品是掌握了更高和更恒定的力量,该机器人可以移动的夹具和产品在一个比在阶段2更高的速度。
图2 手指B在抓一个木制圆筒时的加速度变化情况
2.2夹持手指的位置和力
对掌握第一阶段的减速可以用来追踪的手指位置和估计夹持力。逼近阶段的减速,如果气压提高,瞬间从手指开始移动直到达到额定转速,将在执行时更强大。在这第一阶段的第一和第二加速峰(图3)是较高的,如果气压增加。当执行器的气动压力从1.5到4不等时,第一次和二次减速正峰的差值增大。在0.25的压力下对四样本进行分析,线性相关性之间的气压和减速峰的差异系数为0.98times; R2。在两个气动气缸室的入口处,通过流量计调节夹持器的手指速度。对于这种情况,夹持器手指达到稳定和大约恒定的速度在0.03秒(图3),与气压为3兆帕;在此期间,手指移动8毫米。
图3 第一阶段分析。从上到下:当抓取一木制圆筒时,手指B的速度、加速度和位移之间的关系
2.3 加速度和硬度估计
实验中使用夹持器,从一个固定的摇篮,抓五个直径为50毫米的气缸,该过程被重复40次。五个气缸盖的硬度分别为20、30、40、50和60肖氏硬度,重量分别为416,435,435,447和457克。
加速度计信号处理得到不同的参数,然后用它来估计被夹持的气缸的硬度,这些参数是根据不同的方法提取。
- 提取信号参数时间,是从手指开始接触的产品,直至产品和夹具一起移动。分析并计算参数(公式1~4)
图4中的结果显示Vtot在增加,在更硬的缸体上是Vc而不是Va。在忽略气缸的重量的前提下,如果手指的速度,在开始接触的气缸时是大致相同的,然后硬度估计与此方法应是恰当的。随着对夹持器的调整,如果手指B移动8毫米或更多(图3),那么他就会以一个大约恒定的速度运动。
- 手指和气缸之间的碰撞中实现最大减速。从图5的结果中,对于B和C的最大减速信号,对于更硬的产品总是更大,而对于更硬的产品,显示的是一个不总是很强的信号。
- 如果被抓的产品是硬的,则夹持器的手指经过一个比在柔软的产品的情况下更剧烈的减速。这个过程在最初出现时,对提取的直线斜率后的第一个减速产生峰值手指和气缸之间的第一次接触有严重的影响(图3)。
图4 当夹持器抓取不同硬度的圆筒时Vtot/VB/VC(公式4)的变化。误差栏表示标准偏差超过40个设定值。
图5 减速最大后的初始手指接触不同硬度不同大小的钢瓶时产生的信号BX,CX和A。误差栏表示标准偏差超过40个设定值。
图6 首个减速峰的直线斜坡时夹持不同硬度不同大小的钢瓶时产生的信号BX,CX和A。误差栏表示标准偏差超过40个设定值。
在图6中的线段说明信号BX和CX总是能够区分不同的硬度,但这对于加速
度A来说是不正确的信号。图4到图6中的结果表明当产品从一个固定的摇篮中得到的产品时,夹持器和气缸之间的相对位置是相同的。这些方法的响应是不同的,如果夹持器和产品之间的相对位置变化。图7分析了Vtot(公式(4))参数在产品变重且夹持器与气缸在X方向上的相对位置不断变化的情况下的变化(如图1)。固定位置之间的夹持器和气缸,它总是可以区分它的硬度,但结果是不同的,如果相同的产品在不同的位置抓住。如果气瓶在Z轴旋转这种情况也是可能的。
图7 当夹持器夹着不同硬度的物体在X方向上位移时,加速度计记录的Vtot值(公式(4))。误差栏表示标准偏差超过40个设定值。
图8 从左至右:爪二,其轴的配置和自由度,及加速度计的位置A,B,C
- 在平行爪嵌入加速度计
水果和蔬菜的硬度是其成熟度相关。硬度是由破坏性的方法如麦格尼斯泰勒仪在园艺的评价。该行业有一个接口休息,并有机会发展机器人手爪能够处理和分类水果和蔬菜的硬度,而不需要破坏性试验。
估计硬度的钳子我显然是影响产品的相对位置夹及其与圆柱的使用仅限于产品的形状。爪II(图8中)的开发和评估其硬度抓茄子无论茄子和夹具之间的相对位置【35】。爪的手指的运动是欠驱动的结构,他们也可以绕垂直轴和气缸杆。旋转提高夹手指的不同形状的把握产品的适应性,像茄子。一个气动缸移动手指一个和其他气缸驱动手指B和C和一个吸盘。
手爪抓住位于传送带上
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[152155],资料为PDF文档或Word文档,PDF文档可免费转换为Word
您可能感兴趣的文章
- 饮用水微生物群:一个全面的时空研究,以监测巴黎供水系统的水质外文翻译资料
- 步进电机控制和摩擦模型对复杂机械系统精确定位的影响外文翻译资料
- 具有温湿度控制的开式阴极PEM燃料电池性能的提升外文翻译资料
- 警报定时系统对驾驶员行为的影响:调查驾驶员信任的差异以及根据警报定时对警报的响应外文翻译资料
- 门禁系统的零知识认证解决方案外文翻译资料
- 车辆废气及室外环境中悬浮微粒中有机磷的含量—-个案研究外文翻译资料
- ZigBee协议对城市风力涡轮机的无线监控: 支持应用软件和传感器模块外文翻译资料
- ZigBee系统在医疗保健中提供位置信息和传感器数据传输的方案外文翻译资料
- 基于PLC的模糊控制器在污水处理系统中的应用外文翻译资料
- 光伏并联最大功率点跟踪系统独立应用程序外文翻译资料


