
英语原文共 12 页,剩余内容已隐藏,支付完成后下载完整资料
BATH / ASME 2016流体力学与动力控制研讨会论文集FPMC2016 2016年9月7~9日,英国巴斯
FPMC2016-1739
各向异性表面对液压密封件摩擦性能的影响
Julian Angerhausen
亚琛工业大学流体动力传动与控制研究所 亚琛,德国
Hubertus Murrenhoff
亚琛工业大学流体动力传动与控制研究所 亚琛,德国
Leonid Dorogin
PeterGruuml;nberg研究所 - 第一研究中心- 余利希,德国
Michele Scaraggi
意大利莱切意大利大学教育学院 莱西,意大利
Boris Lorenz
PeterGruuml;nberg研究所 - 第一研究中心- 余利希,德国
Bo N. J. Persson
PeterGruuml;nberg研究所 - 第一研究中心- 余利希,德国
摘要
在泄漏率的模拟中,液压密封的摩擦力或接触压力分布是经常会遇到的情况。然而不同的表面处理方法(例如涂层,研磨或抛光)常常产生具有各向异性特性的粗糙度。
本文中提供了对这种各向异性表面上滑动摩擦的影响的首个实验性研究。为此,我们设计制造了一个试验台,以研究代表一般往复式液压密封件的软性润滑线路接触件。特别地,O形环线被塑造成成与稳定旋转的刚性圆柱体接触。为了形成圆柱形扁平结构,刚性圆柱体的直径选择为明显大于O形环(横截面)直径。此外,我们使用具有不同表面的三个圆柱体:一个各向同性表面(喷砂)和两个各向异性粗糙表糙:垂直划伤或沿轴线方向划伤。在温度控制下,我们在不同的挤压载荷和表面粗糙度下测量了Stribeck曲线,显示出表面粗糙度特性对摩擦力的影响。最后,将实验结果与最近的软性接触件(例如橡胶)润滑的平均场理论提供的预测进行比较。
简介
密封件是液压装置中关键的机器元件。密封件失效可能导致危险的泄漏问题。然而目前,尤其在动态密封方面,例如在气缸应用中,对密封机构的物理认知仍然不足。
除了流体和密封材料的性质外,配合表面的表面形貌对摩擦学系统有重要的影响。当模拟泄漏率,摩擦力或液压密封件的接触压力分布时,通常假设表面是完全光滑的或或是随机粗糙的各向同性表面。例如,当计算有限元模拟中的液压密封的变形时,或者在计算润滑的密封间隙时中,应用Blok的理论[1]时,假定一个完美平滑的表面。然而,由于不同的表面处理方法,机械零件上存在粗糙和各向异性的表面形貌。
反雷诺数方程在使用时只能计算流体摩擦。为了模拟混合摩擦方式中固体接触摩擦的部分,经常使用的理论是格林伍德和威廉姆森的理论 [2]。这种模型方法使用球形粗糙度和高斯高斯分布来描述粗糙表面。虽然这个模型没有物理上的准确性[3],但它至少对于各向同性的表面提供了与测量一致的结果。然而它无法再现由于不同制造方法而产生的各向异性表面的影响。
Patir和Cheng(1978)[4]分析了表面粗糙度,粗糙度轮廓和粗糙度取向对流体动力学润滑的影响。他们发现其具有明显的影响,并发展了流动因素的概念。
在对润滑接触进行建模时,经常使用Harp和Salant(2001)使用和扩展的液压密封的流量因子概念 [5]。
Wohlers,Heipl和Murrenhoff(2010)在计算研究中研究了表面粗糙度对阶梯密封摩擦行为的影响[6]。它们不考虑对流体动力学的影响,而只是考虑其在接触力学中的影响,并且解释说其对表面粗糙度也有明显的影响。
Carbone等人实验研究了各向异性表面在干燥条件下的影响(2009)。对于10-6m/s和10-3m/s之间的非常低的速度[7],在这种情况下,主方向垂直于运动方向开槽时,发现摩擦系数明显更高。此外,Carbone等人扩展了现有的B.Persson [8]开发的接触力学和摩擦理论,以模拟各向异性表面的干摩擦。
Stoll,Houml;rl和Haas正在研究活塞杆表面对正在进行的研究项目实验中的液压密封的泄漏和摩擦的影响[9]。
为了设计一种模型来模拟液压密封件的摩擦力,对其物理过程的深刻理解是必要的。为此。我们设计并建立了摩擦学模型实验的试验台,详细研究了平滑液压密封件中存在的软性、润滑的接触件。
本文结构
以下部分详细描述了我们开发的测试台。研究表面,测试条件和测试程序是第三部分的主要内容。第四部分介绍了实验结果,第五部分对其进行了讨论,并与第六部分的理论预测进行了比较。最后,第七节提供了总结和展望。
测试台
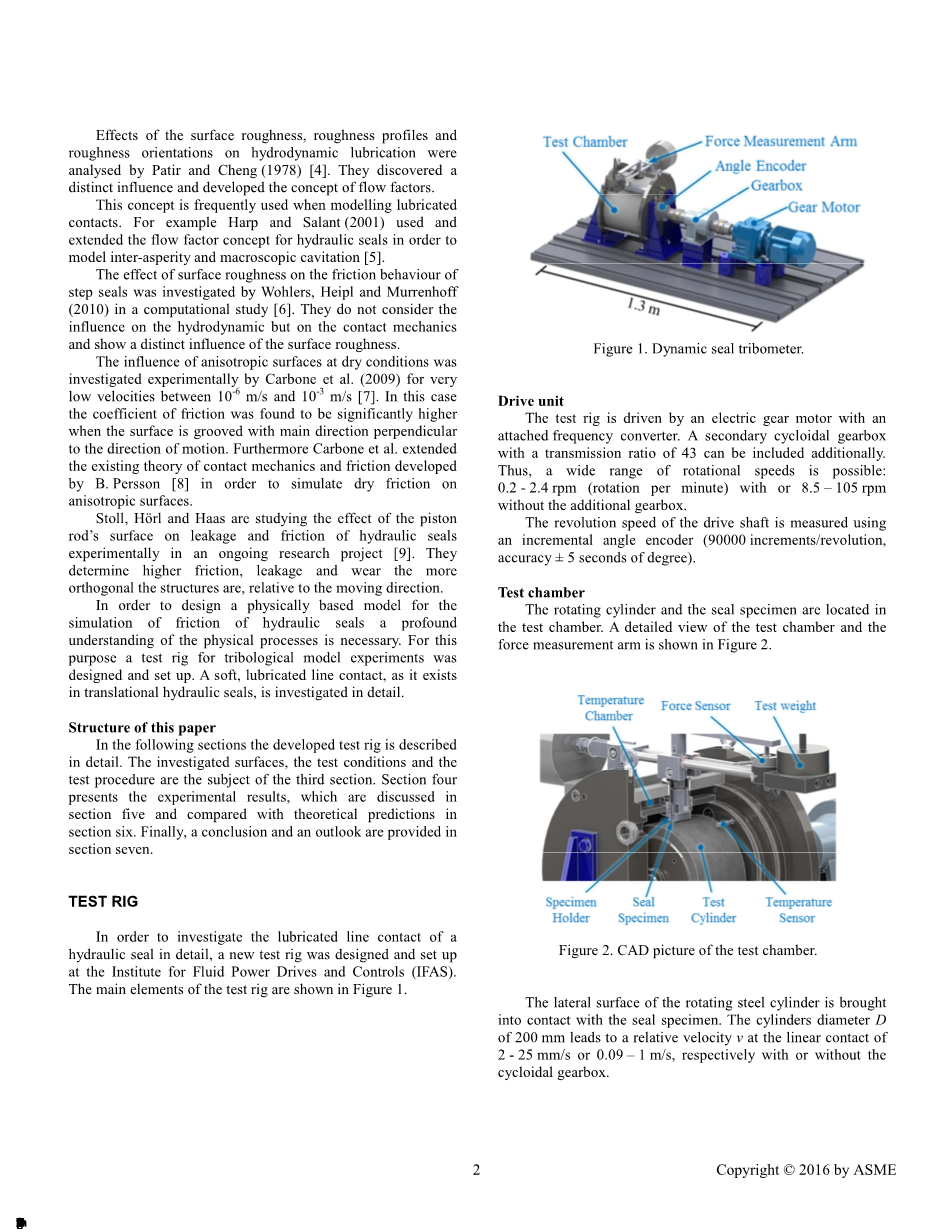
为了详细研究液压密封的润滑油路接触,在流体动力传动与控制研究所(IFAS)设计并设置了一台新的试验台。试验台的主要部件如图1所示。
图1.动态密封测力计。
驱动单元
试验台由带有变频器的齿轮电机驱动,另外-包括传动比为43的二级摆线齿轮箱。 因此,试验台有宽范围的转速:0.2-4.4rpm(每分钟转数)或8.5-105rpm,无需额外的齿轮箱。使用增量角度编码器测量驱动轴的转速(90000增量/转,精度plusmn;5秒)。
测试箱
旋转圆筒和密封试样位于试验箱内。 测试室和力测量臂的详细视图如图2所示。
旋转钢瓶的侧面与密封件接触。 气缸直径D为200毫米,导致线性接触时的相对速度v为2-25mm/s或0.09-1m/s,分别带或不带摆线齿轮箱。
在环境压力下,测试室可以完全充分润滑。与流体接触的所有材料均由不锈钢制成。因此,也可以使用润滑剂,包括水或甘油。
力测量臂
使用力测量臂来施加正常载荷并测量所产生的摩擦力。
力传感器位置可调。因此,通过改变有效的杠杆臂,传感器可以测量宽范围的摩擦力。当没有施加测试重量时,可调整的配重用于保证0N的法向力。因此,负载不依赖于传感器的位置。
温度控制
整个测试室是双层的。由外部温度控制单元提供的传热流体流过温度室(图2)。因此,摩擦仪在10°C和100°C之间是温度可控的。
温度传感器位于摩擦接触附近,以便在测量过程中验证恒温。
图2.测试箱的CAD模型
实验设置
研究表面的描述
在实验中使用了具有不同表面的三个圆筒。 所有三个试样侧面在最后一道工序之后进行喷砂处理。 因此,在以下的各向异性表面粗糙度生产过程之前产生理想均匀的初始条件。
之后在两个气瓶上产生各向异性表面。 为此,横向表面与运动方向正交(alpha;= 0°)或纵向(alpha;= 90°)研磨。 曲面草图如图3所示。三个测试圆柱体如图4所示。
在第一个结论中,基于周期性模式及其重复性,可以说,摩擦波动不是由密封试样,润滑剂或测量系统引起的,而是由沿着圆筒圆周方向的不均匀表面粗糙度引起的 (测试圆筒的圆度测量排除了样品的显着几何误差)。
图17显示了表面1的两个细节。使用放大倍率为5的光学3D显微镜拍摄照片。 在左侧,可以确定所需的各向异性。 然而,右侧的细节显示了关于几个凹槽的角度A的偏差。
图3.角度alpha;的表面形貌和定义。
图4.三个测试圆筒的照片。
沿着盘的直径进行表面测量均匀分布的八个位置处的表面形貌。 在每个位置轴向和周向测量地形. 行扫描测量的长度为20 mm。
粗糙度平均参数Ra分别为接地盘约0.6mu;m,喷砂表面为1mu;m。 因此,对于标准液压缸杆,虽然粗糙度高于推荐值,但非常适合于基于物理的研究。
当使用标准粗糙度统计参数时,一些关于表面形貌的相关信息丢失。 当使用表面粗糙度功率谱(或功率谱密度,PSD)时,可以给出更详细的表面描述:
在这里,表面形貌被转换为波矢量空间q =(qx,qy),其中h(x)是在点x =(x,y)处的表面高度,可以在表面粗糙度功率谱中找到详细的描述[10]。
如图5所示,以所得到的圆柱面1,2和3的一维(1D)表面粗糙度功率谱C1D作为沿圆柱轴向的线扫描形貌测量获得的对数对数刻度上的波数的函数。结果是所有八个测量位置的平均值。在对数刻度上,qgt; 105 m-1时,粗糙度功率谱近似线性。因此,表面看起来是自相似分形,分形维数D = 3-Hasymp;2.2,其中H表示赫斯特指数。
分形表面是其表面的放大部分与原始表面“看起来相同”的表面。 对于自相似分形表面,与水平方向相比,垂直方向的放大倍数必须不同。 如果x的刻度为a·x(andy→a·y),则刻度z必须为aH·z,以使表面看起来相同,其中H表示Hurst指数(0和1之间)。
图5.作为波数q的函数的气缸表面1,2和3的1D表面粗糙度功率谱C1D; 沿轴向线扫描地形测量。
图6显示了轴向所有表面的高度概率分布。 表面3的高度概率分布几乎是一个完美的高斯分布,如喷砂所预期的 - 对于完美的随机粗糙表面,偏度为0,峰度为3.对于表面1和2,高度概率分布变得不对称。 磨削去除了原始轮廓上侧的粗糙度。
图6.所有表面的轴向高度概率分布。
图7表示示出了从沿着轴向(虚线)和切线方向(虚线)的线扫描形貌测量获得的圆柱面1的一维(1D)表面粗糙度功率谱C1D作为对数对数刻度上的波数的函数, 实线)。图8表示出了气缸表面2的等效图。在图9中,示出了气缸表面3的一维(1D)和二维(2D)表面粗糙度功率谱C1D和C2D。 2D功率谱由1D功率谱计算,这对于具有各向同性粗糙度的表面是可能的[7]。
图7.圆柱面1的1维表面粗糙度功率谱C1D作为波数q的函数; 轴线方向(虚线)和切线方向(实线)。
图8.圆柱面2的一维表面粗糙度功率谱C1D作为波数q的函数; 轴线方向(虚线)和切线方向(实线)。
图9.气缸表面3的1D和2D表面粗糙度功率谱作为波数q的函数; 轴线方向(虚线)和切线方向(实线)。 实线蓝线表示PSD的相应自我仿射区域的斜率; 只有为了可读性,它们才被实验曲线取代。
密封试样和接触区特性
在实验中使用丁腈橡胶(NBR)O形圈。 O形环的直径为5mm,每个橡胶试样的长度为L = 40mm。
使用力测量臂施加正常负载。 使用的正常负载和由此产生的法向力(由于有效的杠杆臂)列在表1中:
表1.实验期间的正常负载和最大接触压力
测试条件和程序
以下部分所述的实验在20℃的恒定温度下进行,最大偏差为2℃。 作为润滑剂,使用标准HLP 46液压油。 在环境温度下,其运动粘度为137mm 2 / s。 在本文中,研究了在2.5mm / s至25mm / s之间的非常低的相对速度下的摩擦特性。 实验以5种不同速度连续进行:
2.5 mm/s (0.24 rpm)
4.5 mm/ s (0.43 rpm)
8 mm/ s (0.76 rpm)
14 mm/ s (1.34 rpm)
25 mm/s (2.39 rpm)
在加速到下一个速度之前,速度保持恒定三圈,导致约30分钟的总测量时间。 速度和所产生的摩擦力在图10中举例说明。
图10.在示例性测量期间作为时间的函数的摩擦力和速度。
为了检测密封的可能的磨损效应,使用相同的试样重复该过程三次。之后,进行新密封样品的测量,然后用剩余的载荷进行实验。
在所有实验中使用相同的润滑剂。在整个测试程序之后进行第一个气瓶的额外实验。这些试验的结果符合第一次实验,因此可以排除润滑剂的任何影响,如橡胶颗粒的老化或污染。
实验结果
在本节中我们报告了实验结果。首先一些一般性的观察得到了描述。其次详细研究了各向异性表面的影响。
一般观察
在图11中,针对三种不同的载荷示出了作为速度v的函数的摩擦系数mu;。这些结果用气缸2进行。绘制的摩擦系数是所有相应测量的算术平均值。
图11.摩擦系数mu;作为所有三个正常载荷的速度v的函数,用试验缸2测量。
可以观察到两个方面:首先,摩擦系数mu;随着速度的增加而减小。这种行为是润滑接触中混合摩擦方式的特征。其次,摩擦系数随正常载荷的增加而降低。在理论中,这将解释摩擦的速度和载荷依赖性的物理起源。
表面形貌的影响
在以下曲线图中,测量的摩擦力作为31.1 N(图12),93.3 N(图13)和155.5 N(图14)的正常载荷下所有三个气缸的相对速度的函数。
图12.所有三个试验缸的摩擦力FR作为速度v的函数,正常载荷:31.1N
图13.作为速度v的函数的所有三个测试气缸的摩擦力FR,正常负载:93.3N。
图14.作为速度v的函数的所有三个试验缸的摩擦力FR,法向载荷:155.5N。
与气缸1和2相比,气缸3的摩擦力明显更高。这可能是由不同的外形造成的,也可能是的粗糙度导致。此外,气缸3所经受的磨损明显更高。同气缸1和2相比,最近三次测量后肉眼可以直接看到磨损。
当比较气缸1和2的结果时,测量的摩擦力
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[137377],资料为PDF文档或Word文档,PDF文档可免费转换为Word
您可能感兴趣的文章
- 饮用水微生物群:一个全面的时空研究,以监测巴黎供水系统的水质外文翻译资料
- 步进电机控制和摩擦模型对复杂机械系统精确定位的影响外文翻译资料
- 具有温湿度控制的开式阴极PEM燃料电池性能的提升外文翻译资料
- 警报定时系统对驾驶员行为的影响:调查驾驶员信任的差异以及根据警报定时对警报的响应外文翻译资料
- 门禁系统的零知识认证解决方案外文翻译资料
- 车辆废气及室外环境中悬浮微粒中有机磷的含量—-个案研究外文翻译资料
- ZigBee协议对城市风力涡轮机的无线监控: 支持应用软件和传感器模块外文翻译资料
- ZigBee系统在医疗保健中提供位置信息和传感器数据传输的方案外文翻译资料
- 基于PLC的模糊控制器在污水处理系统中的应用外文翻译资料
- 光伏并联最大功率点跟踪系统独立应用程序外文翻译资料


