英语原文共 10 页,剩余内容已隐藏,支付完成后下载完整资料
基于PLC的SCADA自动海底防喷器堆控制系统
摘要:基于现成的三模块冗余系统开发了一种极为可靠的海底防喷器远程控制系统。为了满足高可靠性要求,使用诸如控制器冗余,总线冗余和网络冗余的各种冗余技术来设计系统硬件架构。 控制逻辑,人机界面图形设计和冗余数据库是通过使用现成的软件开发的。 在实验室中进行了一系列实验以测试海底防喷器层叠控制系统。 结果表明,测试的海底防喷器功能可以成功执行。 对于可编程逻辑控制器,离散输入组和模拟输入组的故障,控制系统可以在人机界面中给出正确的报警。
1.介绍
海底防喷器(BOP)堆在为10000英尺超深水区域的钻井活动提供安全工作条件方面起着极其重要的作用。 海底BOP叠层的故障可能导致灾难性事故,例如,深海石油钻井平台“深水地平线”爆炸,石油于2010年4月20日从路易斯安那州海岸溢出。据认为,在深水地平线钻机上,海底 BOP在爆炸前后没有隔离井。 海底防喷器组可能在井喷之前发生故障,或者可能由于事故而损坏。
BOP堆在下海底立管组件(LMRP)连接器和海底井口连接器之间。传统的电液控制系统使用电线对传输电命令信号。大量的电线使得装甲的脐带缆和电接口随着水深度的增加而变得沉重和笨重。近年来已经开发了多重电液控制系统,其使用多导体铠装海底脐带缆线来传输激活海底容器中的电磁操作导向阀的编码命令。 智能监控和数据采集(SCADA)平台,为海底防喷器管理提供经济和用户友好的解决方案,是多路电液控制系统的核心。
近年来,已经开发了各种SCADA系统。大量基于可编程逻辑控制器(PLC)的SCADA系统用于废水处理厂,低温泵送设备,水泵控制系统,模糊比例积分微分控制器和石油工业。 Chaudhuri等人开发了基于PLC的自动化系统,以控制在绞线的二次冷却区域中的水流,还给出了自动化系统配置。Aydogmus通过PLC提供了一个带有模糊控制器的液位控制系统的SCADA控制。 Bayindir和Cetinceviz描述了为生产设备设计的水泵控制系统,并通过使用PLC和工业无线局域网技术在实验室的实验设置中实施。一些新的方法被用于PLC软件设计。 Kandare et al。通过引入一种称为ProcGraph的新的过程建模语言,提出了一种基于模型的PLC软件开发方法。此外,基于PC的SCADA系统用于电力系统,海水淡化厂和实验室测试系统,还开发了基于网络和基于移动电话的SCADA系统。
然而,上述大多数SCADA系统是非冗余的,其不能提供高可靠性。 冗余系统通常基于诸如现场可编程门阵列(FPGA)或单芯片微型计算机(SCM)的芯片级处理器而不是诸如PLC或PC的系统级处理器来开发。基于芯片级处理器的冗余系统难以开发,这需要专业人员开发控制硬件和软件。
对于海底防喷器系统,需要高可靠性和易于开发。因此,选择基于PLC的三模块冗余系统GE Fanuc Genius模块冗余(GMR)来提供监控控制和数据采集,因为系统可以提供对单个硬件组件故障的容限。基于现成的GMR系统,可以容易地开发海底BOP系统,并且可以通过使用现成的软件容易且快速地校正潜在错误。
这项工作的重点是通过使用硬件冗余技术,软件冗余技术和一系列投票算法设计的海底防喷器组的极高的可靠性。本文结构如下。第2节描述了海底BOP控制系统的硬件结构。 第3节描述了三模块冗余输入和输出投票算法。 第4节描述了控制系统的软件方法。在第5节,在实验室进行了海底BOP操作的一系列实验,并给出了结果和讨论。第6节总结了论文。
2 硬件架构
2.1 整体系统架构
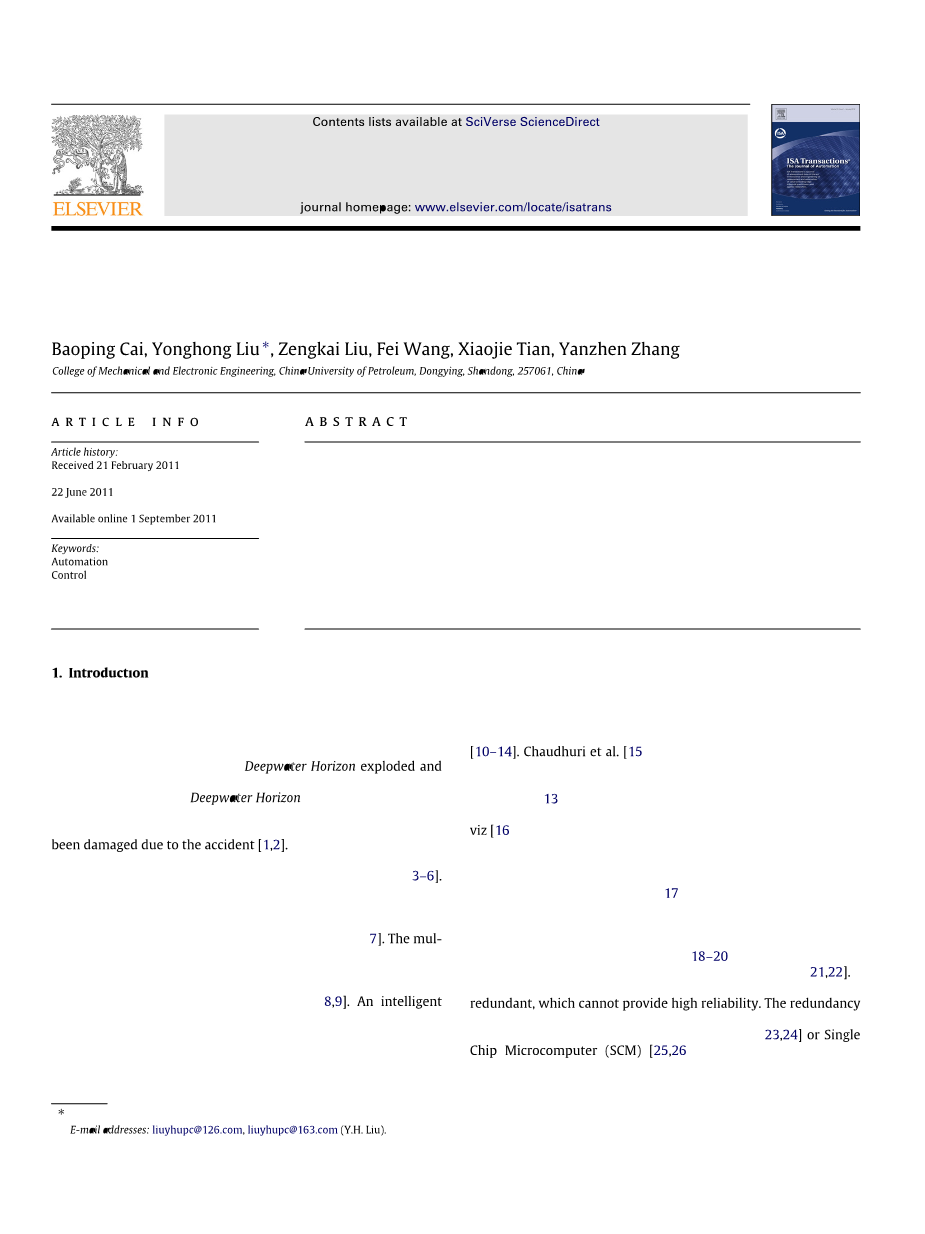
多路控制系统是基于微处理器的,并且通常利用PLC将在表面上发起的命令传送到控制箱中的海底电子模块(SEM)。海底防喷器控制系统包括表面部件,连接的脐带缆线和海底部件。
位于钻井平台中的表面部件由中央控制单元(CCU),钻机面板,工具推进器面板和液压动力单元(HPU)组成,如图1所示。
CCU是多路复用控制系统的核心,它为刀具面板,钻机面板,HPU和SEM提供了通用的通信接口点。通过冗余以太网,工作站和数据库冗余服务器连接到三个GMR系统,该系统由三个90-70系列PLC组成。在VPN服务器中配置虚拟专用网络(VPN),授权人员可以远程访问工程办公室中的BOP控制过程。
钻机面板和工具推进器面板具有相同的架构和功能,除非司钻面板位于钻台上,而工具推进器面板位于远离钻台的非危险区域。两个面板中的人机界面(HMI)触摸屏使用以太网连接到CCU。按钮面板使用Genius总线连接到CCU。触摸屏中显示了BOP堆栈的所有报警,趋势和参数。钻机和工具推杆可以通过触摸屏或按钮面板完全控制海底防喷器系统。
电信号在光纤中继器(FOR)中被转换为光信号,光纤中继器是用于Genius现场总线网络的电/光信号接口转换器。光信号被传输到海底黄色SEM和蓝色SEM在两条完全独立的海底脐带缆线。除了三对多模光纤电缆外,在每个脐带电缆中还提供两对电线,用于为SEM提供冗余电源。
为了满足更高的可靠性要求,使用各种冗余技术。这些技术包括控制器冗余,总线冗余,网络冗余,SEM冗余,服务器冗余,电源冗余等。
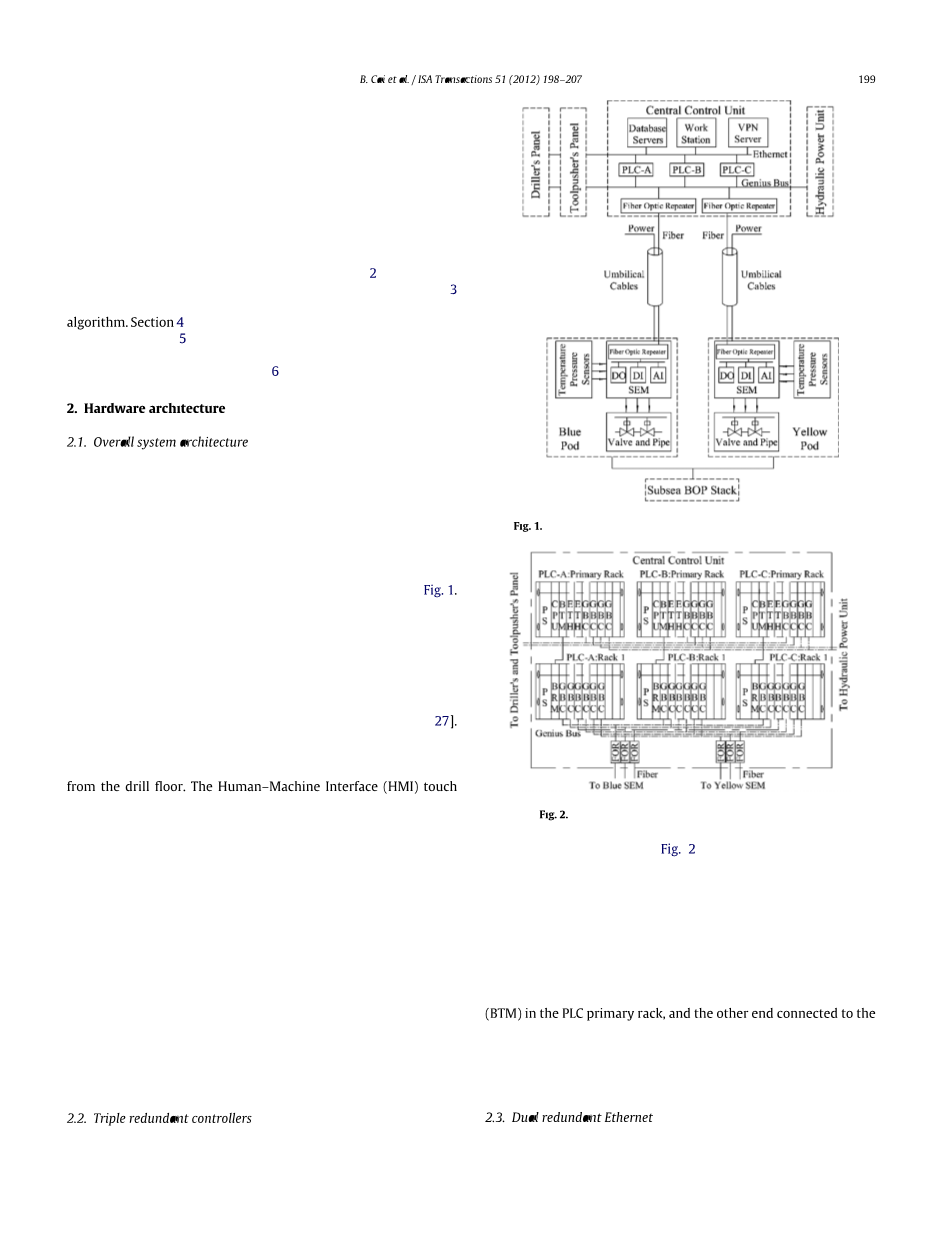
2.2三重冗余控制器
三GMR系统,由三个90-70系列PLC(美国GE Fanuc自动化)和四组Genius总线组成,如图1所示。2. PLC主机架通过两组独立的双Genius总线和12个Genius总线控制器(GBC)连接到位于工具推杆面板,钻孔机面板和液压动力单元中的Genius分布式输入/输出(I / O)子系统。同样,PLC扩展机架1通过两组独立的三重Genius总线和18 GBC连接到位于蓝色和黄色SEM的Genius分布式I / O子系统。 PLC扩展机架1通过18根双绞线并行I / O电缆连接到CPU,其一端连接到PLC主机架中总线发送器模块(BTM)的下连接器,另一端连接到顶部连接器安装在PLC扩展机架1的插槽1中的总线接收器模块(BRM)上。每个PLC单独监视和控制Genius分布式I/O子系统,用于输入现场设备和H块输出信号的三重或双重冗余。
2.3 双冗余以太网
计算机和三重PLC之间的双冗余以太网通信网络通过用于以太网的冗余物理连接来实现。冗余通过两个快速以太网交换机,每个计算机中的两个快速以太网卡,每个PLC主机架中的两个以太网模块(ETH)以及连接以太网电缆来实现,如图3所示。以太网的这些双物理连接提供完整性和独立性。除了以太网的物理连接冗余,IP网络冗余非常重要。它可以通过在不同网络或不同网络段上设置不同的IP地址来实现。主网络地址设置为192.168.1.x,辅助网络地址设置为192.168.2.x.
CCU,工具推杆面板和钻机面板中的计算机和服务器通常通过主以太网网络与PLC通信。 当任一主以太网模块,以太网交换机,以太网卡或电缆故障时,通信将自动切换到辅助以太网。 这确保了以太网通信的高安全性。
VPN服务器通过其各自的以太网卡和核心交换机连接到CCU中的工作站。IP地址设置为192.168.0.x. VPN服务器通过第二个以太网卡连接到公共网络。授权人员可以通过VPN远程访问工程办公室的BOP控制过程。
2.4冗余海底电子模块
每个海底BOP系统具有两个完整的控制舱。每个吊舱能够在BOP上执行所有必要的功能。虽然这些系统可以被认为是冗余的,但是与一个吊舱相关联的任何主要问题将导致系统被取回到地面进行修理。
将SEM放置在厚的钢制圆顶容器中以保护其免受外部水压,其是一个大气压的干燥氮气吹扫的壳体。黄色和蓝色外壳安装在黄色荚和蓝色荚的顶部,在1000英尺的海底工作。黄色SEM和蓝色SEM完全独立。他们分别控制黄色荚和蓝色荚。当一个SEM或其吊舱发生故障时,另一个将用于操作所有海底功能,并且不受禁用的功能影响。
黄色SEM和蓝色SEM的结构完全相同,由用于离散输入/输出和模拟输入的子系统组成,如图4所示。离散输出子系统由八个H块冗余离散输出组组成,适用于需要故障安全和容错输出的应用。输出组产生输出信号需求,通过从CCU中的三个PLC提供的数据中的2个表决投票来控制海底容器中的224个电磁操作导向阀。 离散输入子系统和模拟输入子系统都由三个输入组组成。 每个输入组由单独的Genius总线上的三重输入Genius模块组成。来自海底传感器的离散和模拟信号在输入组中投票。这些PLC逻辑由所有三个PLC独立执行,接收相同的投票结果。
3.投票算法
3.1 离散输出投票
离散输出(DO)组用于控制海底容器中的224个电磁操作导向阀。例如,以“蓝色荚”关闭“年度上限”的操作。当操作员发送“关闭上一年度”的命令时,三个PLC将编码的命令发送到H块冗余离散输出组。 输出投票在输出组中执行。 如果投票结果为1,上一年度BOP成功关闭。 如果投票结果为0,操作失败,它将再次在黄色pod中操作。
所有输出块的双工默认值设置为1。表1给出了海底BOP堆的离散输出投票。 当所有三个PLC都在线时,至少两个数据形式必须匹配。块组设置表决结果以匹配由至少两个PLC命令的状态。如果一个,两个或三个PLC离线,则双工默认值为1将用于替换其中一个PLC,并且系统仍然执行三次投票。这些确保即使在严重危险的情况下,上层年度防喷器也可以关闭。
3.2离散输入投票
离散输入(DI)组主要用于监视离散信号,例如压力开关(PS)信号。 与在输出块组处执行的GMR输出投票不同,输入投票由PLC中的GMR软件执行。 例如,蓝色吊舱中的“关闭井口连接器”的PS信号。 如果PS信号的投票结果为1,表示井口连接器已成功关闭。 如果投票结果为0,表示操作失败。
所有输出块的双工状态和默认状态设置为0.表2给出了海底BOP堆的离散输入投票。当存在两个或三个离散输入时,表决结果类似于离散输出。然而,如果两个或三个输入失败,投票结果为0,这意味着井口连接器未成功关闭,并且操作必须再次以黄色荚实施。这确保了井口连接器的高安全性。
3.3模拟输入投票
模拟输入(AI)组用于监视模拟信号,例如温度和压力信号。与离散输入投票类似,模拟输入投票也由PLC中的GMR软件执行。例如采用蓄能器的压力信号。双工状态设置为“平均”,默认状态设置为-10。表3给出了海底防喷器组的离散输入投票。
对于有三个模拟输入的三输入组,GMR软件比较三个相应的模拟输入阀。它选择中间值作为投票结果。如果其中一个模拟输入失败,则将平均值选择为投票结果。如果只有一个输入,该值是投票结果。如果所有输入失败,投票结果将设置为-10,这意味着输入组失败,并且压力读数不准确。
4.软件方法
4.1控制逻辑
为了开发海底BOP系统的控制逻辑,应首先完成GMR配置和PLC配置。 硬件配置和表决算法在GMR系统软件Genius Modular Redundancy Phase IV v 3.00中进行配置。 生成的文件夹将导入到Proficy Machine Edition目标中。 在Proficy Machine Edition中,创建PLC配置。 控制逻辑是使用Proficy Machine Edition Logic Developer(v5.90,Build 4699)[30]中的梯形图语言开发的,所有逻辑都下载到CCU中的GMR系统的三个PLC。
PLC逻辑扫描的步骤如图5所示。在输入扫描期间,GMR PLC从每个输入模块获取最新值。 在输入扫描之后,GMR系统软件在GMR功能块中执行输入投票,并将结果放置在离散和模拟输入表的特殊映射区域中。从那里,它们可用于应用程序。 输入差异报告和自动测试也在GMR功能块中执行。
应用程序根据接收的输入确定输出的所需状态。它由HPU块,海底BOP堆块,紧急断开序列(EDS)块,吊舱块,立管/分流器块,管道块和回读块组成。 每个块由几个控制逻辑组成。 所有七个功能块顺序执行。
执行应用程序后,在GMR功能块中执行输出差异报告和自动测试。 在输出扫描中,PLC监视来自每个Genius输出子系统的表决输出的状态。然后,将开始新的扫描。
由于每个BOP功能的控制逻辑类似,所以以“关闭管道柱塞”的功能为例。关闭管道闸板的逻辑流程图如图1所示。在正常操作期间,对于两个吊舱要接通电力,并且仅液压地选择一个吊舱。当PLC接收到从钻机面板或工具推杆面板发送的命令信号“关闭管道柱塞”时,将检查液压选择哪个吊舱。如果选择了蓝色盒,则黄色盒的选择不同。因此,蓝色电磁阀直接驱动阀(DDV)通电,蓝色子板安装(SPM)阀被激活。在10秒后,根据来自压力开关的信号检查SPM是否被激活。如果SPM被激活,20秒后,进行另一检查,管柱是否完全关闭。如果任何检查失败,程序将通知操作员并断开蓝色DDV的电源,然后自动液压选择黄色吊舱。 “关闭管道柱塞”的命令将在黄色容器中执行。如果两个检查都成功,程序发送一条消息,直到接收到“block”命令,蓝色DDV被断电。 “关闭管道柱塞”的操作完成。如果两个pod都失败,程序发送一个报警。
4.2 HMI程序
计算机位于CCU,钻孔机面板和工具推杆的面板上,运行用户友好的HMI程序,该程序中充满了有用的图形和报告工具。
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[139788],资料为PDF文档或Word文档,PDF文档可免费转换为Word
您可能感兴趣的文章
- 饮用水微生物群:一个全面的时空研究,以监测巴黎供水系统的水质外文翻译资料
- 步进电机控制和摩擦模型对复杂机械系统精确定位的影响外文翻译资料
- 具有温湿度控制的开式阴极PEM燃料电池性能的提升外文翻译资料
- 警报定时系统对驾驶员行为的影响:调查驾驶员信任的差异以及根据警报定时对警报的响应外文翻译资料
- 门禁系统的零知识认证解决方案外文翻译资料
- 车辆废气及室外环境中悬浮微粒中有机磷的含量—-个案研究外文翻译资料
- ZigBee协议对城市风力涡轮机的无线监控: 支持应用软件和传感器模块外文翻译资料
- ZigBee系统在医疗保健中提供位置信息和传感器数据传输的方案外文翻译资料
- 基于PLC的模糊控制器在污水处理系统中的应用外文翻译资料
- 光伏并联最大功率点跟踪系统独立应用程序外文翻译资料


