
英语原文共 6 页,剩余内容已隐藏,支付完成后下载完整资料
基于LADAR和SLAM跟踪算法的托盘自动识别
摘要 为了提高AGV对托盘的识别精度和整个AGV系统工作的效率,使用新方法与之前的方法组合起来是非常有必要的。 随着业务流程和业务类型的增加,条码技术也越来越突出。 本文介绍了基于激光雷达算法和SLAM算法的新型托盘识别方法。 这种新方法结合了激光三角测量原理,线性光范围测量原理和单目视觉与二维码扫描技术,使得托盘的效率和精度大大提高。
关键词:托盘; 跟踪算法 单眼视力; SLAM;
一,引言
物流配送中心在现代商品流通过程中发挥关键作用,是现代物流的重要组成部分[1]。在传统的物流仓储中,货物的存储,管理,分拣,处理,分配,信息和数据管理分开进行。物流配送中心的出现不仅实现了各种功能的统一管理运作,而且在很大程度上降低了运营成本,在更大程度上满足了市场需求,减少了对体力劳动的依赖,从而加快了货物流动[2]。货物处理是物流配送中心必须开展的工作行动。叉车更常用于实施这一举措。然而,随着技术的发展,物流配送中心的一些因素,如灵活性差,智能化水平低,劳动密集型铲车和搬运设备已经成为越来越多的要求[3]。
AGV或自动引导车是一种灵活,智能的设备。我们可以从图1中看到。第一个AGV申请是在仓库运输杂货[4]。使用自动引导系统,可以实现自动加载和卸载任务而无需手动干预。其主要操作方式是根据从初始到目的地自动行走的指示,以及机械结构的整理货物处理,接受主机通过AGV与主机服务器之间的通信系统的任务指令。 AGV逐渐发展成为物流中不可或缺的物流体系配电系统[5]。根据1989年的统计数据[6],AGV系统安装方面的应用类型分为以下几种:即时交付系统(56%),灵活制造(FMS)/灵活组装传输系统(13%) ,存储负载传输,非自动存储和检索系统(AS / RS; 12%),AS / RS接口(8%),渐进式组装(7%),微型负载AS / RS接口(1%)等(3%)[7]。货物信息,货架信息和托盘信息等信息流数据收集的速度和准确度是物流配送中心业务水平的关键指标。
图1 AGV小车
目前,托盘的识别是二维码扫描技术,以RFID技术为主要技术。 RFID技术对仓库管理中未充分利用的托盘本地化具有巨大的潜力[8]。但是RFID技术是基于二维码扫描技术的,所以如果二维码的位置不对,会造成很多麻烦。本文首先简要介绍了托盘的现状。然后,作者讨论了相机的安装位置及其影响;建立运动学模型;研究了坐标系在机器人坐标与全局坐标之间的变换;做了一些必要的初步实验,如相机校准棋盘方法。最后,提出了一种基于激光雷达和SLAM算法的新型识别方法,结合RFID技术,作者对托盘的自动识别进行实验,获得更好的结果,并提供更精确的位置信息。
A.国际形势
首先,目前使用托盘标准不统一。 国际标准化组织(ISO)难以统一全球运输托盘规格。到目前为止,ISO必须实施6种托盘规格,1200mmtimes;1000mm,1200mmtimes;800mm,1219mmtimes;1016mm,1140mmtimes;1140 mm,1100 mmtimes;1100 mm,1067 mmtimes;1067mm。 目前国内托盘规格在中国更为混乱,据托盘专业委员会的调查,目前托盘规格分布规格达数十种,其中塑料托盘的规格相对集中,主要为1100mm x 1100mm和1200mmtimes;1000mm,约50%的塑料托盘; 没有统一的标准木托盘[9]。
B.国内现状
1996年,交通运输部中国研究院提出,ISO6780,中国托盘的国家标准按照多式联运一般平板托盘的主要尺寸和公差来制定。 中国托盘标准化选择了1000times;1200mm和1100times;1100mm [4],如图2所示。因此,本文首先选择“塑料平板托盘识别规范”(15234-94 GB / T)以及 “普通平板尺寸和公差”(2934-2007 GB / T)[10]。
图2 托盘类型
三、照相机安装位置及其影响
为了得到架子和相机之间的角度,将整个过程分为三部分。 首先,我们需要将每个高亮点列的坐标计算为零件坐标数组; 第二,我们使用坐标阵列通过设置关系来获得相对于相机焦点的反射点的三维坐标,最后将空间坐标拟合成直线并获得角度。
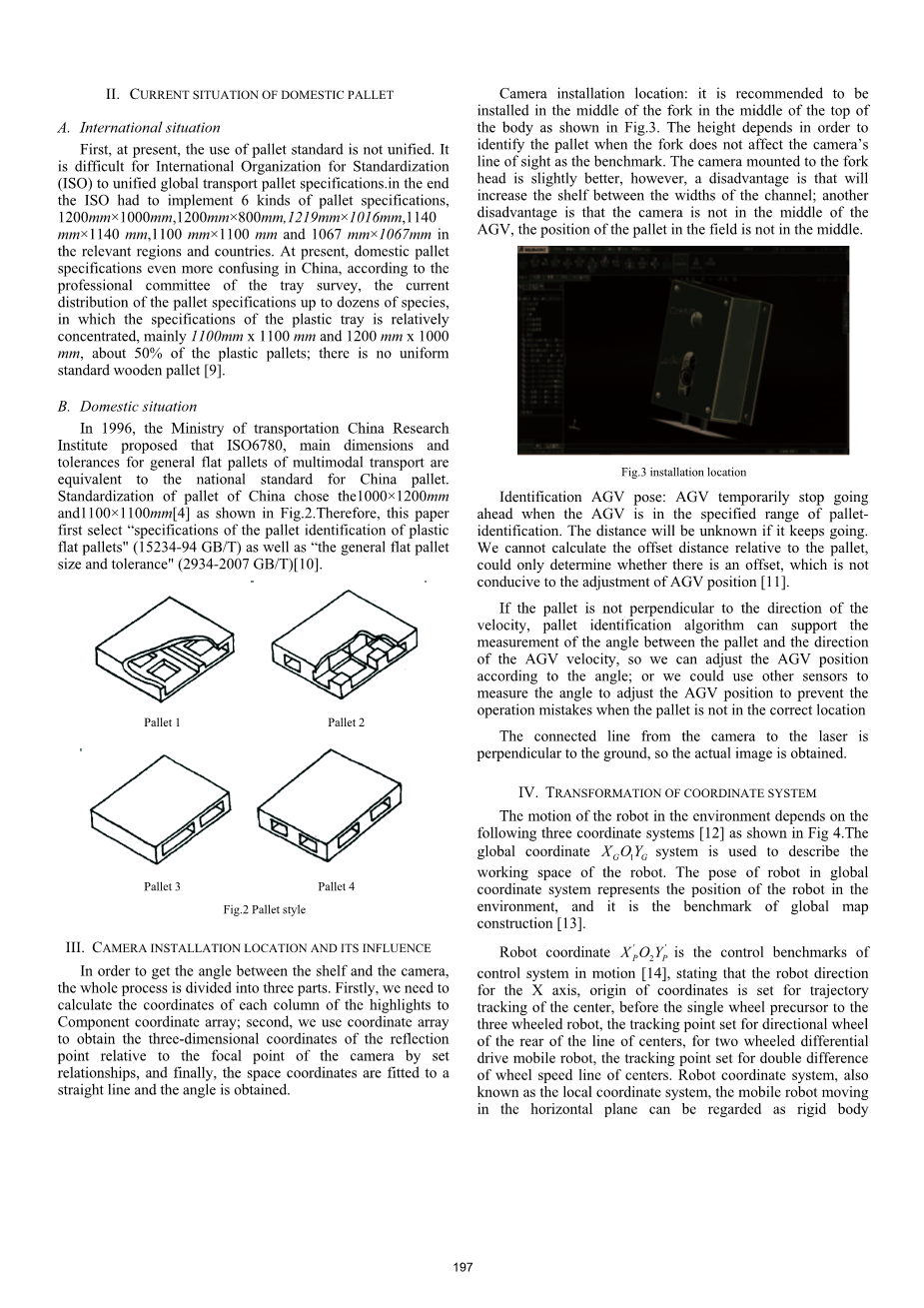
相机安装位置:如图3所示,建议安装在车身顶部中间的叉子的中间。 高度取决于在叉子不影响相机视线的基准时识别托盘。 安装在叉头上的相机略好一些,但是缺点是增加了通道宽度之间的搁架; 另一个缺点是相机不在AGV的中间,使得货盘在现场的位置不在中间。
识别AGV姿势:当AGV处于指定的货盘识别范围时,AGV暂时停止。 如果它继续前进,距离将是未知的。 我们无法计算相对于托盘的偏移距离,只能确定是否存在偏移,这不利于AGV位置的调整[11]。
图3 安装位置
如果托盘不垂直于速度方向,托盘识别算法可以支持测量托盘与AGV速度方向之间的角度,从而可以根据角度调整AGV位置; 或者我们可以使用其他传感器来测量角度来调整AGV位置,以防止当托盘不在正确位置时的操作错误,使相机到激光的连接线垂直于地面,因此获得了不符实际的图像。
四、 协调系统的转换
机器人在环境中的运动状态取决于以下三个坐标系[12],如图4所示
全局坐标系统用来描述机器人的工作空间。 机器人在全局坐标系中的姿态代表了机器人在环境中的位置,是整个地图构建的基准[13]。
图4 机器人坐标系统
机器人坐标是控制基准,控制系统运动系统[14],说明机器人方向X轴,坐标原点设置为中心的轨迹跟踪,在单轮前驱到三轮机器人之前,为定向轮设定的跟踪点为后轮的中心线,用于双轮差速驱动的移动机器人,跟踪点设定为车轮速度线中心的两倍。 机器人坐标系,也称为局部坐标系,它在水平面移动的移动机器人可以被认为是实地位置翻译机器[15]。 我们只关心与移动机器人相关本地的位置信息,例如,围绕机器人障碍物信息以及环境信息[16]。传感器坐标系是基于环境检测传感器特性的坐标系。 在本文中,激光扫描仪用于建立坐标系,是激光扫描仪在机器人坐标系中的安装位置。
设定传感器安装在在机器人协调系统[17]中,用于线路特征表示传感器坐标系的,可以表示为在笛卡尔坐标系中,传感器进入机器人坐标系可表示为:
其中,是将点坐标变换为机器人坐标系。是机器人坐标中线的参数表示系统。 如果机器人的位置在任何时候是则机器人坐标系中的特征向全局坐标系的变换可以表示如下:
是转换到机器人协调系统的新点坐标。 [是全局坐标系中线的参数表示。
五、视觉传感器校准实验
A.相机校准棋盘方法
相机校准包括相机校准参数和失真参数校准[18]。 相机内在矩阵:
Fx, fy分别是实际焦距,产品宽度和像素单元尺寸的透镜,是光感测芯片中心与光轴之间坐标系偏差的变换, 这通常是由安装错误引起的。 CCD传感器模型可以看作是针孔模型,来自环境的光,通过焦点投射到成像平面上,获得清晰的图像。 由于制造过程,径向失真和切向畸变是不可避免的。 前者取决于形状镜头; 后者的组装错误的结果来自组件,也称为圆柱形或鱼眼效果。因此,摄像机不是真实的物体,所以在摄像机校准之前,图像不能直接用于测量。
B. CCD或电荷耦合器件的视觉传感器校准实验
对于径向变形,如图5(a)所示,从中心到周边的扩散失真程度用下面的公式调整像素位置。
x和分别表示测量值和校正值,而r表示从该像素点到图像平面中心点的像素点距离。对于切向失真,如图5(b)所示,它经常 来自晶体的制造误差导致透镜和成像平面不平行[19]。 我们使用两个参数P1和P2进行描述。
因此,我们需要得到五个校准失真参数k1,k2,k3,p1,p2,除了相机内插
参数。 k1,k2,k3是径向失真参数,p1,p2是切向失真参数。 我们使用OpenCV通过张正友的校准方法实现摄像机参数的计算[20]。
图5 对比图
六、实验结果
A.计算每列高精度的坐标
最亮点的计算公式为:
我们用t表示阈值的长度。 知道托盘的大小,我们从图像中选择480个节点.我们可以使用这个方程来得到子像素坐标,如图6所示。
图6 列信息图
B.计算每列反射点的空间坐标
1)计算深度Z。
假设摄像机成像面为平面通过相机对焦,垂直于地面和成像平面的平面,为beta;,无线光学平面的激光发射为gamma;。当反射点位于平面beta;(即横坐标的图像宽度为一半),激光,反射点,摄像头对焦和成像点,四点共面。 共面四点之间的几何关系如图7所示。 基于类似的三角理论,我们可以得出:
Z是深度,C是每个像素的实际大小,但是由于Z不容易得到校正参数,我们使用以下公式:
Z可以距离目标点到相机的某个特定点(平面上的点)有一定距离。
图7 在垂直方向图像的几何关系
对于一般反射点,我们需要将点转换为中心线以获得深度。 假设无线光学平面gamma;和平面alpha;之间的交点为l。 显然,平面gamma;与通过反射点P平行于交点1的线l之间的交点p与点P具有相同的深度z。目前,线l垂直于平面beta;因为无线光学平面gamma;垂直于平面alpha;,即p和P具有相同的成像值y,所以我们可以使用相同的点P的深度计算公式来获得点的深度平面beta;。
图8一般点图像
2)计算X坐标和Y坐标。
作者可以通过深度为z的相似三角形得到以下结果。 我们使用w和h表示宽度和身高。
高度和宽度是图像像素的宽度和高度,图像中的P点的坐标是和,如图8所示。
3)货架角度
通过外部图像反射的直线仍然是直线,所以作者使用这种方法来确定红外扫描的平面。 在新图像中,首先给出亮点的所有坐标,然后,将霍夫变换为图像搜索段,并对线上的点的相应3D坐标进行三维线性拟合,得到 直线的矢量方向,通过垂直于地面的直线得到平面之间的夹角,相机成像面是
图9 图像中最亮点
最终,我们将得到图中最亮点,如图9所示。
激光导引系统可以实现更高的定位精度,更好的路径灵活性和更高的智能化,适应AGV导航技术的发展趋势。目前,SLAM基于视野,主要采用路标,其通过视觉传感器系统获得机器人场景的典型特征,成为移动机器人SLAM环境路标。扩展卡尔曼滤波器(EKF)是滤波器SLAM算法中最常用的滤波方法之一。然而,随着地图特征数量的增加,系统的性能下降。
与传统的单目视觉SLAM的算法相比,本文无需计算大量的特征点。该算法步骤更简洁,资源节省更多,缩短了时间复杂度。作者从大量数据中提取了有限数量的点和线来描述空间。通过分析算法计算过程的复杂性,结果表明,与传统特征提取方法相比,该方法的效率明显提高,运行时间显着降低,成本显着节省,正确识别率高达99 %在相同的初始条件下和扩展卡尔曼滤波器的效果相同。
七,结论
本文研究了托盘自动识别的创作技术,并提出了一种全新的方法 - 基于拉达和SLAM跟踪算法的托盘自动识别。依托强大的数据库openCV,三维地图重建技术应用于托盘识别,获取特征点的深度信息。
AGV系统可以扫描和三维重建托盘并识别货架的位置,识别精度为5 mm,测量托盘与叉车之间的角度和AGV方向的路面,测量精度的测量精度较低超过0.5度,精度达到99%以上。
本文还研究了基于激光雷达扫描仪的机器人同时定位和映射(SLAM)的创建技术。为了解决创建环境地图中的高计算复杂度问题,本文作者创新提出了一个段描述符,并通过雷达点云数据特征提取建立了雷达稀疏特征图,大大减少了计算数据量的正确性。以此为背景;本文对基于ladar和camera的动态环境映射进行了研究。
致谢
作者要感谢我的主管对这个项目的支持。此外,本研究的参与者对研究的贡献感激不尽。
参考文献
[1] Hammond G(1986)AGV在作品中,IFS,英国.
[2]鲍涛,袁宝,王婷等。 AGV跟踪控制方法的应用与实验[C] //智能系统多传感器融合与信息集成(MFI)2014年国际会议,IEEE,2014:107-112.
[3] Bostelman R,Hong T,Cheok G.自动导向车辆的导航性能评估[C] // IEEE International Conference on Technologies for Practical Robot Applications. IEEE,2015.
[4]郑B K,赖亚Z,冯Y E.磁导航AGV控制系统的设计与实现[J].自动化与仪器,2014.
[5]孟伟,刘泽Q.视觉引导AG
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[138037],资料为PDF文档或Word文档,PDF文档可免费转换为Word
您可能感兴趣的文章
- 饮用水微生物群:一个全面的时空研究,以监测巴黎供水系统的水质外文翻译资料
- 步进电机控制和摩擦模型对复杂机械系统精确定位的影响外文翻译资料
- 具有温湿度控制的开式阴极PEM燃料电池性能的提升外文翻译资料
- 警报定时系统对驾驶员行为的影响:调查驾驶员信任的差异以及根据警报定时对警报的响应外文翻译资料
- 门禁系统的零知识认证解决方案外文翻译资料
- 车辆废气及室外环境中悬浮微粒中有机磷的含量—-个案研究外文翻译资料
- ZigBee协议对城市风力涡轮机的无线监控: 支持应用软件和传感器模块外文翻译资料
- ZigBee系统在医疗保健中提供位置信息和传感器数据传输的方案外文翻译资料
- 基于PLC的模糊控制器在污水处理系统中的应用外文翻译资料
- 光伏并联最大功率点跟踪系统独立应用程序外文翻译资料


