
英语原文共 7 页,剩余内容已隐藏,支付完成后下载完整资料
基于激光位移传感器的压电致动器振动的人工神经网络建模
摘要:本文在实验数据的基础上,对压电作动器振动的人工神经网络(ANN)模型进行了改进。利用扫频正弦信号激励,得到了执行机构的受控振动。利用激光位移传感器测量位移信号响应的峰值。在线性和非线性工作范围内对压电驱动器进行了建模。仿真结果与实验值的一致性达到90.398.9%。结果表明,该神经网络模型与实验值之间具有较好的线性关系。
关键词:压电致动器、激光位移传感器、共振频率、振动位移、人工神经网络。
1.导言
压电材料因其固有的换能器特性而被广泛应用于智能结构中。作为执行器,它们将电能转化为机械能,反之,当它们作为传感器[1]工作时,将机械能转化为电能。压电执行器(PEAs)由于其有效的位移能力,在原子力显微镜[2]、加速器成像系统[3]、机床[4]、计算机元件[5]、工业和医疗机器人[6]等领域有着广泛的应用。PEA的机械位移表征是科学和工业研究的核心问题[7,8]。
振动表面的机械位移是由离参考点/零点(平衡条件)的距离变化决定的。在给定的激励频率范围内,PEA的振动可以分别或同时用位移、速度和加速度来描述[9,10]。PEAs的动态试验主要涉及扫描正弦激励和位移测量。基于计算机的测量技术由于其高灵敏度和高精度被广泛应用于PEA振动的控制[11,12]。
PEA是一种机电声耦合系统,其频率特性与器件尺寸和使用材料有关。PEA的分析和设计通常采用集中单元模型(LEM)。Prasad和Gallaset等通过扫描激光测振仪定义了夹紧压电驱动器件(受激替代电压)的速度,并将速度在频域内积分得到不同条件下的位移。他们进行了电声模型和压电驱动装置的登月舱(由粘在金属垫片上的压电陶瓷薄片组成)。这些模型方法通过实验测量得到了验证[13-15]。特别是,吉阿图等人对用于控制流体流量[16]的压电驱动合成射流装置的频率响应预测登月舱的发展和演变作了全面的综述。
在许多振动应用中,振动的结构是由数学模型定义的。已有许多研究报道了PEA的线性操作[17-20]。然而,如果PEA暴露在不断变化的励磁电压下,由于其容量有限,可能会出现非线性工作条件。在非线性工作条件下,非线性动力学、迟滞和饱和会产生一些不良影响,如性能损失和共振频移等。因此,对Preisach模型、具有外生输入的非线性自回归移动平均模型(NARMAX)和人工神经网络(ANN)建模等非线性控制技术进行了改进,以解决非线性问题。特别是神经网络由于其高精度逼近能力和较强的容错能力,在识别过程中得到了广泛的应用[21,22]。例如Ahn等人将神经网络应用于混合型主动隔振,Liu、Zhang等人报道了基于参数估计和神经网络的故障检测和诊断,Chen[25]将神经网络应用于结构故障诊断。
现代非线性建模方法被成功地用于描述非线性系统。其中一种方法是基于非线性元素的并行运算进行大量计算的神经网络。由于并行学习过程、快速响应和自适应的特点,ANN可能是最好的信息处理系统之一。
众所周知,ANN可以被描述为
(1)
其中,输入通过内部连接通过处理元素传输。每个连接都有一个权重影响特定元素 [25]。这可以是正、空和负。传递函数作为在计算中使用所有输入的处理元素输出的总和。
激活函数安排无限输入处理元素的预定输出。最常用的四种激活函数是:线性函数、阈值函数、step函数和sigmoid函数。
2.材料和方法
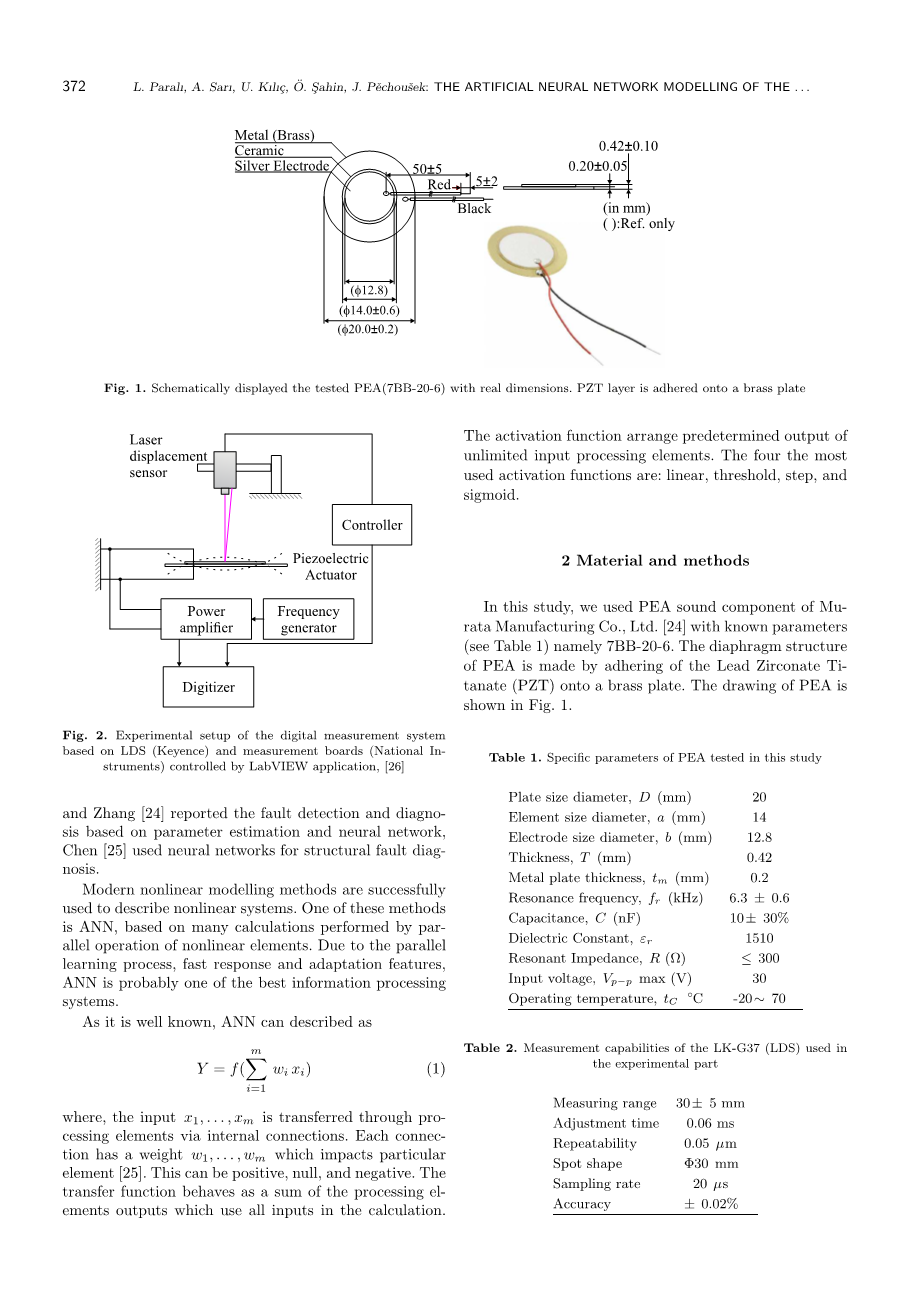
在本研究中,我们使用了村田制造有限公司的PEA音响组件。[24]已知参数(见表1),即7BB-20-6.PEA的膜片结构是将钛酸错铅(PZT)粘在黄铜板上制成的。PEA的图如图1所示。
Metal (Brass):金属(黄铜)Ceramic:陶瓷Silver Electrode:银电极
Fig. 1. Schematically displayed the tested PEA(7BB-20-6) with real dimensions. PZT layer is adhered onto a brass plate:图1.原理图显示了测试的PEA(7BB-20-6)的真实尺寸.PZT层粘在黄铜板上。
表1.本研究测试的PEA的具体参数
Plate size diameter, D (mm):平板尺寸直径,D(mm)
Element size diameter, a (mm):单元尺寸直径a(mm)
Electrode size diameter, b (mm):电极直径b(mm)
Thickness, T (mm):厚度T(mm)
Metal plate thickness, tm (mm):金属板厚度tm(mm)
Resonance frequency, fr (kHz):共振频率,fr(kHz)
Capacitance, C (nF):电容c(nF)
Dielectric Constant:介电常数
Resonant Impedance, R (Ω):共振抗阻R(Omega;)
Input voltage, Vpminus;p max (V):输入电压(V)
Operating temperature, tC ◦C:工作温度°C
采用LK-G37激光位移传感器(LDS)对所研究的PEA在室温下的振动特性进行了实验测量,并由LK-G3001控制器(Keyence)[25]控制。LDS的测量参数如表2所示。
Table 2. Measurement capabilities of the LK-G37 (LDS) used in the experimental part:表2.LK-G37(LDS)在实验中的测量性能
Measuring range:测量范围
Adjustment time:调整时间
Repeatability:重复性
Spot shape点状
Sampling rate:取样率
Accuracy:精确
2.1实验装置
振动测量系统的概念是利用虚拟仪器技术在LabVIEWTM(国家仪器)中使用。图2显示了系统的实验设置。
Laser displacement sensor:激光位移传感器Power amplifier:功率放大器Frequency generator:频率发生器Piezoelectric Actuator:压电驱动器Controller:控制器Digitizer:数字转换器
Fig. 2. Experimental setup of the digital measurement system based on LDS (Keyence) and measurement boards (National Instruments) controlled by LabVIEW application, [26]
:图2.基于LabVIEW应用的LDS(Keyence)和测量板(国家仪器)数字测量系统的实验设置[26]
控制和数据读出系统由一台带有两个PCI测量板的个人计算机组成。采用NI PCI-6115板作为PEA振动控制的驱动信号发生器(励磁电压)。在NI PCI-5122数字转换器的模拟输入通道上处理从LDS获得的模拟信号。通过导航程序(Keyence)分别对LDS设备进行设置。在开始测量应用之前,必须设定精确的排列。测量系统的详细配置见[26]。激光束被聚焦到PEA盘的中心。从分析上看,PEA的边界条件可以指定为完全自由或任何强迫条件。完全自由边界是指PEA在空间中漂浮,地面没有附着或连接,在零频率下表现出刚体行为。然而,在实验工作中,不可能完全获得自由状态。因此,为了建立完全自由边界的模型,必须在[27]试验过程中采用一些方法来支撑PEA。
该测量系统可以用扫频-正弦激励法[26]测量动态位移作为PEA的振动响应,从10Hz到40
kHz,步长为1Hz。
4.振动的PEA的ANN建模
利用[26]中已有的实验数据,建立了PEA振动行为的神经网络模型。在找到给定电压和频率下的最小和最大位移值后,对这些值进行归一化。进一步描述了数据的制备过程。
4.1模型结构
所提出的神经网络模型具有电压和频率两个输入量。位移用作输出。在本研究中,我们使用了一个多层前馈-反向传播神经网络与Levenberg-Marquardt算法,该算法最小化了均方误差之和。由最速下降法和牛顿法推导出的列文伯格马夸特算法,由方程给出
(2)
其中w是权向量,J是Jacobian矩阵,是组合系数,l是单位矩阵,e是误差向量,E是可调参数。过大的参数会导致算法作为最陡下降法的行为。否则,它的行为就像牛顿的方法。并给出了相应的更新算法。
ANN模型由30个完全连通的隐层集组成。每个输入层和人工神经网络输出层使用所谓的逻辑激活函数。
(4)
所提出的神经网络模型的设计步骤如下:
求出每个激励电压值的最小和最大位移值。
每个位移值标准化为0-1。
将数据集分为培训集和测试组。
在接受了培训集的教育后,通过测试集对模型进行了检验
。将人工神经网络的测试结果转换为实际值。
采用均方误差和平均绝对误差等统计方法进行误差计算。
图3显示了ANN模型的最终结构。
Voltage:电压Frequency:频率Input layer:输入层1-st hidden layer:第一隐层
2-nd hidden layer:第二隐层Output layer:输出层Displacement:迁移
Fig. 3. The final structure of ANN model, used in this study for modelling PEA vibration:
图3.用于PEA振动建模的人工神经网络模型的最终结构
4.2编写实验数据
在5001~8000kHz的频率范围内,用1Hz的步长测量了PEA表面的位移变化,记录了0.5V~10V的激励电压幅值,步长为0.5V。因此,对60000种不同的输入值进行了位移测量。最小和最大位移值标准化为[28,29]。
表3显示了数据集。
Table 3. Preparation for data processing:表3.数据处理准备
将用于训练和测试人工神经网络的归一化值转换为实数。
4.3建模结果
在神经网络模型的设计中,采用了神经网络工具箱(Matlab)。数据集包括60000点,整个数据集由两组组成:训练集和测试集。表4显示了六种不同情况的数据。
Table 4. Distrubution of examined six different situations:六种不同情况的分配
每种情况下,所提出的算法执行20次。计算了每种情况下的确定系数(R2)、均方误差(Mse)和平均绝对误差(Mae)。
表5为计算值。如图所示,由于训练集的大幅度减少,测试集的结果误差很小。如果假设时间值足够高,神经网络就可以学习训练情况。因此,epochs是训练阶段的核心因素。在本研究中,最佳的epochs被手动定义为近100。训练集误差减小了0.7%。
Table 5. Calculated error values for six proposed configurations of training and testing sets:
表5.训练和测试组六种拟议配置的计算误差值
图4显示了ANN模型中MSE随迭代次数的变化。正如人们所看到的,MSE值在第40次迭代(epochs)之后并没有明显的变化。
Mean Squared Error (mse):均方误差
训练R(回归)值表示人工神经网络建模结果与实验值之间的关系(见图5)。在本研究中,用ANN工具箱为例6计算出此值为0.99964。R=1的值表明人工神经网络模型与实验值之间存在着精确的线性关系。
Fig. 5. Regression curve displayed for Case 6, when the training set includes 600 data and testing set includes 59400 data.:图5.当训练集包括600个数据,测试集包含59400个数据时,为例6显示回归曲线。
图6和图7显示了在激励电压为0.5至10V的情况下的实验结果和ANN结果。
Fig. 6. Experimental and ANN modelling results for Case 6 at (a) — 0.5 V, and (b) — 5 V:
图6.案例6(A)-0.5V和(B)-5V的实验和人工神经网络模拟结果
Fig. 7. Experimental and ANN modelling results for Case 6 at (a) — 5.5 V, and (b) — 10 V:
图7.案例6(A)-5.5V和(B)-10V的实验和人工神经网络模拟结果
5数学建模评价与讨论
均方误
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[19010],资料为PDF文档或Word文档,PDF文档可免费转换为Word
您可能感兴趣的文章
- 饮用水微生物群:一个全面的时空研究,以监测巴黎供水系统的水质外文翻译资料
- 步进电机控制和摩擦模型对复杂机械系统精确定位的影响外文翻译资料
- 具有温湿度控制的开式阴极PEM燃料电池性能的提升外文翻译资料
- 警报定时系统对驾驶员行为的影响:调查驾驶员信任的差异以及根据警报定时对警报的响应外文翻译资料
- 门禁系统的零知识认证解决方案外文翻译资料
- 车辆废气及室外环境中悬浮微粒中有机磷的含量—-个案研究外文翻译资料
- ZigBee协议对城市风力涡轮机的无线监控: 支持应用软件和传感器模块外文翻译资料
- ZigBee系统在医疗保健中提供位置信息和传感器数据传输的方案外文翻译资料
- 基于PLC的模糊控制器在污水处理系统中的应用外文翻译资料
- 光伏并联最大功率点跟踪系统独立应用程序外文翻译资料


