
英语原文共 7 页,剩余内容已隐藏,支付完成后下载完整资料
人工机器人的手的手关节的设计与分析
摘要 - 为了进一步了解什么生理特征使人的手有着不可替代的许多灵巧的功能,有必要正确的开发人工关节的各个方面,同时共享类似的动态特征。在本文中,我们解决设计一个二自由度的指数手指的掌指(MCP)关节的问题。人造MCP接头由球形接头,钩形韧带和硅橡胶套管组成,整体上提供了人类手指接头所需的功能。我们通过比较动态特征与两个人类受试者的指标,通过分析脉冲响应与线性回归,定量验证人工关节的有效性。人工关节的设计参数是不同的,以突出它们对关节动力学的影响。修正的二阶模型是考虑非线性刚度和阻尼的,并且考虑更高阶的模型。在人类(R2 = 0.97)和指数指数的人工关节(R2 = 0.95)中观察到良好的结果。人工关节的刚度和阻尼的参数估计被发现与文献中的相似,表明我们的新关节是指数手指的MCP关节的良好近似。
I. 介绍
由于其与人类手有着相似性,人类机器人手有可能有益地影响人们生活的许多方面。诸如空间探索,个人援助和手部假肢等领域都可以用高度仿生的手段进行。空间探索依赖于轨道或空间平台的不断修复,其中探测本身对于需要高度灵活的机器人操纵器在其位置上起作用的人来说常常是危险的。实现具有非常类似于我们自己的特性的机器人手将允许自然的相互作用,同时实现假肢设计的飞跃。于恢复手的灵活性和功能,并且还复制人类手指的符合性以允许在非结构化人类环境中的安全操作。在功率,致动和重量约束方面也存在其他大的技术障碍。然而,在这里,我们专注于复制人类手指关节所需的内在生物力学。
人手中的手指关节具有几个同时难以模拟的生物学特征。 这些包括:(1)在MCP,PIP的骨骼的独特形状和DIP接头,其确定接头处的自由度; (2)由细韧带形成的关节囊,其设定关节的运动范围; 和(3)软骨和滑膜液,使两个关节面之间的低摩擦接触[1]。 通常研究人员没有设计人类机器人手来结合这些生物学特征或在解剖学上正确。
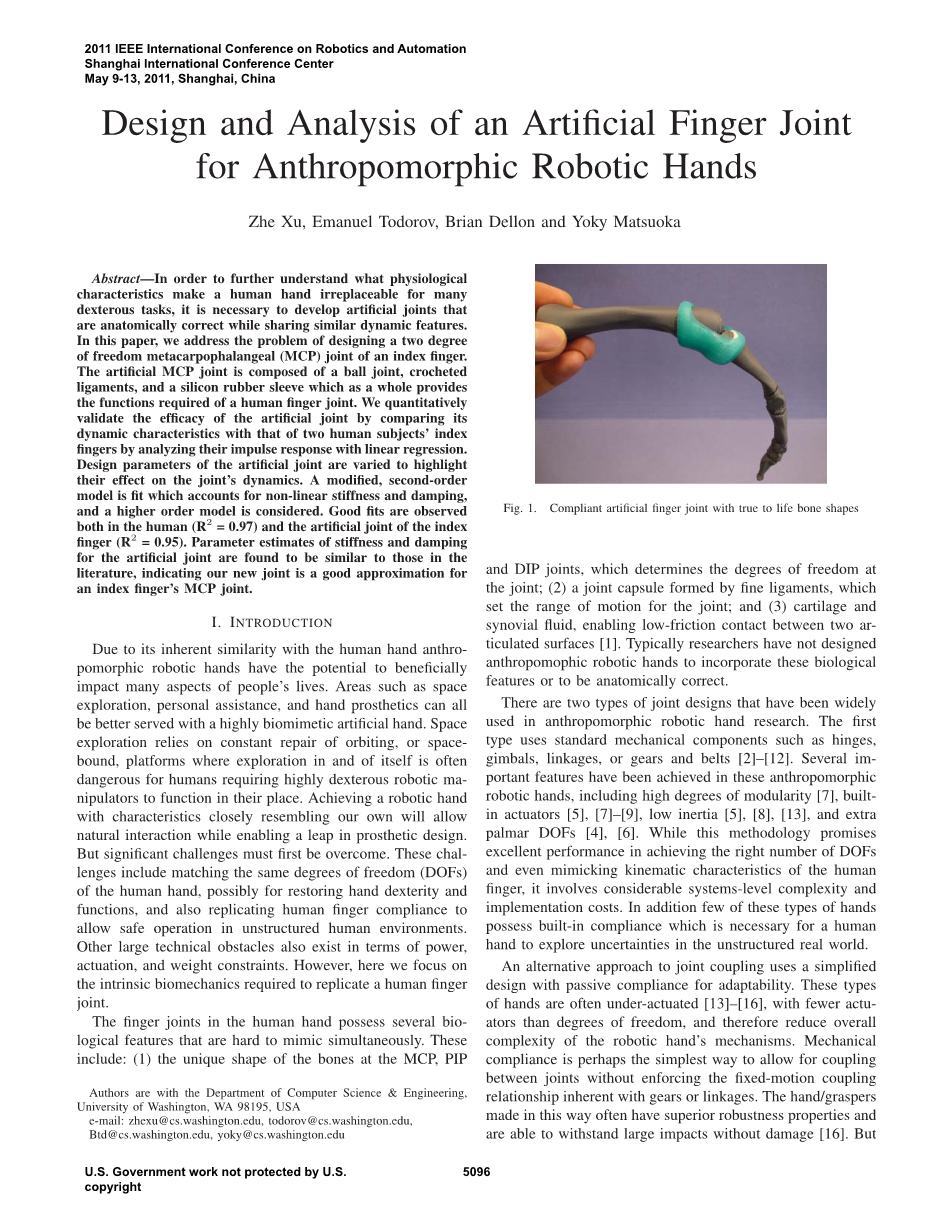
图1 符合人体的手指关节与真实的生活骨形状
有两种类型的接头设计已广泛用于人形机器人手研究。 第一种类型使用标准的机械部件,如铰链,万向节,连杆或齿轮和皮带[2] - [12]。 在这些人类机器人手中已经实现了几个重要的特征,包括高度模块化[7],内置致动器[5],[7] - [9],低惯性[5],[8],[13] 额外的手掌DOFs [4],[6]。 虽然这种方法在实现适当数量的DOF和甚至模拟人类运动的运动特性方面表现出极好的性能,但它涉及相当大的系统级复杂性和实施成本。 此外,这些类型的手中的少数具有内置的顺应性,这是人类手探索非结构化现实世界中的不确定性所必需的。
联合耦合的另一种方法是使用简化的设计,具有被动适应性。 这些类型的手经常是致动不足的[13] - [16],具有比自由度更少的致动器,因此降低了机器人手的机构的总体复杂性。 机械顺从性可能是允许在接头之间联接而不强制固定于齿轮或联动装置的固定运动联接关系的最简单的方式。 以这种方式制造的手/抓紧器通常具有优异的坚固性,并且能够承受大的冲击而不损坏[16]。 但在实现手指的期望运动范围和具有柔性手指接合点之间也存在折衷,因为弹性部件本身不能限制关节的运动范围。
图2.当前和新版本的ACT手的MCP接头设计的比较
虽然标准设计方法,如上所述,可以模拟手指关节的运动行为,它几乎没有照亮显着特征,使人类的手不可替代的许多灵巧的任务。 因此,有必要开发基于精确生理学的人工关节,以便定量地识别这些特征,从而提供对人形机器人手设计的洞察。
对于标准机械部件的强制性替代是开发直接利用人类关节的独特铰接形状的机构,以及用于致动手指的腱罩结构。 遵循生物灵感设计还减少了单个组件的总数,导致优雅的设计。
本文所述的手指关节(如图1所示)的灵感来自于上述方法的组合,并且有可能成为下一代解剖正确测试床(ACT)手的关键组成部分[17] - [ 19]。 我们专注于关节囊和提出一个人工关节,其机械设计和运动范围类似于人类手指。 在下面的章节中详细介绍了创新的机械设计方法,然后将人工MCP接头的系统动力学与实际的人工MCP接头进行比较。
II开发人工手指
本文中讨论的人工关节的灵感来自当前版本的ACT手。 由于来自尸体手的共同祖先,两个关节共享许多生物力学特征,例如骨段的长度,关节表面的形状和伸缩罩。 然而,两者之间有主要的区别。
在图2中,用于当前和新设计的ACT Hand的指数指数的掌指(MCP)关节与人类对应物进行比较。 图2的解剖图示出了移除了伸缩罩的MCP关节。 当前版本的ACT手使用万向接头在MCP关节实现2自由度(对于内收/外展为 /- 35°,对于伸展/伸展为-30°至90°)。 虽然人工关节使用接近人类手指的实心球体以实现2-DOF手指运动(具有来自3DOF球形关节的一个额外的欠驱动的DOF)。 我们的人工关节独立于伸缩罩设计,因此不能完全覆盖MCP关节的上部,这可以在图2的右手侧看到。
如图2最左边的图所示,ACT手的当前设计中的指数指针的运动范围由MCP骨骼外壳的形状规定。 虽然新的设计使用钩扣关节韧带限制MCP关节的运动范围与弹性套管复制肌肉骨骼结构的被动生物力学。 虽然在当前版本的ACT手中MCP关节的运动学与人手非常匹配,但是必须使用复杂的电机控制策略以便模拟被动生物力学。 将模拟被动生物力学的负荷转移到关节处的物理弹性元件将允许ACT手降低其控制复杂性。 这不仅节省了功率,而且降低了使用非任务特定命令使执行器饱和的机会。
在下面的小节中,人工关节的每个部件将根据其装配顺序引入。
- 手指的模块化设计
解剖学上正确的骨结构的采用似乎意味着成本密集和复杂的制造图形处理。 然而,这种成本可以通过快速原型机的创新来实现。 手指接头的每个部分由Dimension BST 768(Stratasys Corp.,Eden Prairie,MN)3D印刷。 3D打印部件的分辨率为0.025mm,打印整个索引器的所有组件只需3小时。 此外,ABS塑料的强度足以抵抗伸缩罩的诱导应力。
手指接头的每个远端部分设计为可从其基座拆卸,如图3(a)所示。 该设计提供两种功能。 第一种是易于安装钢环(0.8mm直径),其形状符合ABS骨的横截面的轮廓。 钩环接合囊的边缘被缝合到该钢环(图3(b))上,使得后者沿着接近手指接合处的横截面的轮廓形成用于前部的连续附接区域。 部分组装的MCP接头部分如图3(c)所示。
这种模块化设计的第二个功能是为未来的改进提供一个平台。 例如,ABS部件的表面可以进一步镀有0.003英寸厚度的染色机,以便在手指接头(RePliForm Corp.,Baltimore,MD)上无摩擦地接触。 这个设计的即时效益也在实验部分中展示,其中远端指针的不同重量被测试用于动态识别。
为了模拟人体关节的关节软骨的无摩擦表面,使用热塑性塑料(Shapelock Corp.,Sunnyvale,CA)来涂覆MCP接头的插座侧的表面,如图3(d)所示。 接头联接器的这种组合减小了两个铰接表面之间的摩擦。
B.钩接关节韧带
关节囊是致密的纤维结缔组织,其通过专门的附接区附接到骨头并且在关节周围形成套筒。它根据其受到的应力在厚度上变化,并且局部加厚以形成囊状韧带,其还可以结合肌腱(图2)。在关节空间中并且通过限制通过其韧带的运动来提供可穿过性[20]。
在手术外科医生避免使用机械复杂的替换手术手术关节。手部外科手术中使用的常见假肢关节可能包括由钛合金,陶瓷或塑料制成的柔性节段[21],但不能复制骨头上的表面细节。将假体关节的柔性段插入在相邻的趾骨内部产生的孔中。然后用关节囊密封关节。这些类型的人工关节已经临床证明恢复关节功能[22]。没有关节囊,邻近的趾骨将失去完整性和分裂,因此它是我们的生物启发人造关节的关键组成部分。
我们的钩扣关节韧带用0.46mm Spectra R? (AlliedSignal,Morristown,NJ)。 选择纤维是因为其强度(200N断裂强度),高刚度,柔韧性,以及其在骨头上平滑滑动的能力。
在人造韧带的制造期间应用两个基本的钩编针脚。 这些是链缝和单钩针,如图4(a)和(b)所示。 一系列链式线迹被称为一行,该行的长度由关节囊的局部周长确定。 单个钩针确定行宽度,而双钩针将具有宽度。由单个钩针形成的链中的总长度变为关节囊的柱长度。
图3.索引指针的组成部分。 (a)指数指针的模块化设计。 (b)&(c)用于固定钩形手套胶囊边缘的钢环。 (d)在手指接头处提供低摩擦表面的热塑性涂覆铰接表面
。
图4. MCP关节的钩环韧带。 (a)基本钩编I型链缝。 (b)基本钩编II型 - 单钩。 (c)钩形接头韧带的双曲线形状限制了指数指数MCP关节的运动范围。 (d)带有钩状韧带的部分装配的指针手指。
钩编的关节韧带样品示于图4(c)和(d)中。 这个样本说明了完全的双曲线形状[23],它覆盖了伸缩罩通常所在的区域。 我们的设计(如图2所示)不包括这个背部区域,因为我们认为伸缩罩是一个独立的部件[24]。 钩状韧带的双曲线形状非常适合于密封关节空间,并且其柱长度决定了MCP关节的运动范围。
给定两个钢环之间的固定距离,柱长度然后确定在关节处于中间位置的韧带中的松弛量。 钩针织带的松弛限制了关节运动时的关节范围。 柱长度基于接头的尺寸经验地确定。 用于接合韧带的每个端部的基底排由总长度等于钢环的周长的链形成。 还可以通过改变缝合类型来控制关节囊的局部厚度。 制作钩针式关节囊后,将其缝合到钢环上,钢环卡入切入骨中的凹槽中。
C.硅橡胶套
手指关节的动力学性质在很大程度上取决于沿骨表面的肌肉和腱的被动生物力学。与使用致动器模仿肌肉骨骼特性不同,弹性套筒可以设计成与钩形韧带结合作用于每个关节,重建期望的动力学。人造接头的弹性部件由具有高剪切强度的硅橡胶(PlatSil R71系列RTV,Polytek Development Corp.,Easton,PA)制成。其形状由一组3D印刷模具(参见图5)铸造,其形成围绕MCP接头的套筒,在手指伸出/伸出期间提供弹性和粘性力。为了实现硅橡胶的最佳性能和高耐久性,使用真空室在固化之前从硅混合物中除去微小的气泡。硅橡胶套的厚度可以通过使用不同的模具容易地改变。该特征为人工关节囊的动态识别提供了可调的刚度和阻尼。所有上述组件一起设置了使人工关节紧密模拟人体关节的运动学和动力学的阶段。为了验证我们的方法的有效性,我们进行了人工关节的系统识别。
III。 系统识别
我们进行了一组实验和分析,旨在确定我们的新机器人关节的动态属性,以及将其与人类手指进行比较.
实验设置如图6所示。我们使用两个人类受试者以及四个不同的人工受体进行实验。 后者与硅材料的厚度(薄1.5mm对厚2.0mm)不同,并且存在或不存在7.5g质量添加到远端段(8.7g)。 研究了所有四种组合。 将红外标记物(PhaseSpace Inc.,San Leandro,CA)连接到每个手指的基部和远端部分。 使用7相机系统在480Hz测量3D标记坐标。 如图所示,手的基部被固定。 人类指纹的DIP和PIP关节也被固定; 人工手指没有可动的DIP和PIP关节。 人工受精者的详细参数列于表1中。人类受试者被指示放松和闭上他们的眼睛,以尽可能避免自愿反应.
图 5.完全组装的MCP接头的横截面。 右下:硅橡胶套和用于制造的模具
图6左:实验设置。 右:每个手指的典型试验,使用厚硅胶盖。
- 实验设计和方法
该方案包括手动施加约120个扰动,以约1s的间隔。 在每个扰动中,实验者将手指(人或人工)延伸到随机选择的位置,并突然释放它。 连续记录运动捕获数据并解析为单独的试验。 这个设计旨在揭示围绕停止点的手指的动态特性。 理由是,如果手指像质量弹簧阻尼器系统[25],停止阶段将特别显露其动态属性。
B.数据处理
原始数据非常干净。静态条件下的噪声标准偏差在50微米(0.05mm)的数量级,没有滤波。由于我们需要位置的三阶导数,我们得到一个三次样条(Matlab样条工具箱),并调整其平滑参数,以便它不会在原始位置数据中引入伪像,但高阶导数是平滑的。然后我们实施了一个程序,自动识别连续记录中的单独试验,使用一旦释放手指,由于被动刚度,它发展了一个高速度。试验开始因此被定义为发射速度的峰值 - 以便避免由于实验者施加的力而造成的污染。我们在数据集中包括在每个速度峰值之后的一定时间间隔:对于未装载的人工器件为175msec,对于载荷器件为350msec,对于人工器件为200msec。这些被调整以便捕获在数据中显现的不同时间尺度。每个条件100个试验包括在数据集中。由于两个人类受试者的结果非常相似,但是我们为其中一个受试者收集了较少的可用数据,我们专注于其他受试者的数据。典型试验如图6所示。
如下将远侧标记物的3D位置转换成弧度。 使用主成分分析我们识别标记移动的2D平面; 实际上在第三维中也有一些运动,但是我们在视觉上验证主运动在我们的分析中定义的2D平面中。 然后,使用MCP关节中心和远端标记之间的已知距离,将圆形定义为投影2D数据。 该距离在人类受试者中用卡尺测量,并且从人工指纹的CAD模型中获知。
C.定性观察
主观上,人工手指感觉很像一个轻松的人类手指。图6中的试验说明所有系统都具有轻微的欠阻
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[137288],资料为PDF文档或Word文档,PDF文档可免费转换为Word
您可能感兴趣的文章
- 饮用水微生物群:一个全面的时空研究,以监测巴黎供水系统的水质外文翻译资料
- 步进电机控制和摩擦模型对复杂机械系统精确定位的影响外文翻译资料
- 具有温湿度控制的开式阴极PEM燃料电池性能的提升外文翻译资料
- 警报定时系统对驾驶员行为的影响:调查驾驶员信任的差异以及根据警报定时对警报的响应外文翻译资料
- 门禁系统的零知识认证解决方案外文翻译资料
- 车辆废气及室外环境中悬浮微粒中有机磷的含量—-个案研究外文翻译资料
- ZigBee协议对城市风力涡轮机的无线监控: 支持应用软件和传感器模块外文翻译资料
- ZigBee系统在医疗保健中提供位置信息和传感器数据传输的方案外文翻译资料
- 基于PLC的模糊控制器在污水处理系统中的应用外文翻译资料
- 光伏并联最大功率点跟踪系统独立应用程序外文翻译资料


