
英语原文共 9 页,剩余内容已隐藏,支付完成后下载完整资料
本科生毕业论文(设计)外文翻译
题 目:轴向磁通永磁电机中齿槽转矩的最小化:设计概念
轴向磁通永磁电机中齿槽转矩的最小化:设计概念
M. Aydin1, Z. Q. Zhu2, T. A. Lipo3, Fellow, IEEE, and D. Howe2
1Department of Mechatronics Engineering, Kocaeli University, Kocaeli 41040, Turkey
2Department of Electronic and Electrical Engineering, University of Sheffield, Sheffield S1 3JD, U.K.
3Department of Electrical and Computer Engineering, University of Wisconsin-Madison, Madison, WI 53706-1691 USA
摘要:各种技术已经存在并用于减小径向永磁(RFPM)机器中齿槽转矩。然而,尽管其中一些可以应用于轴流PM(AFPM)机器,但额外的制造复杂性和成本可能令人望而却步。因此,替代低成本技术可以应用于AFPM机器。本文主要通过三维有限元分析研究了主要用于RFPM机器的生产转矩最小化技术的适用性,并提出了一些用于AFPM机器的替代齿槽转矩最小化技术。
窗体底端
关键词 - 轴向流量,齿槽转矩,永磁体,转矩波动。
Ⅰ. 介绍
评估不同机器设计的扭矩性能,考虑扭矩密度,同时考虑转矩脉动[1]-[5]。扭矩波动的主要来源是[1]-[3]:a)齿槽;b)脉宽调制(PWM)电流谐波;(c)非理想反电动势(EMF)波形;d)相通电流;和e)电源电压脉冲和逆变器死区时间。在高速下,转矩波动通常被系统惯性滤除。然而,在低速时,转矩波动可能导致不可接受的速度变化,振动和声学噪声。
本文仅关注齿槽转矩的最小化,因为它在永磁体(PM)机器设计过程中往往是一个重要的考虑因素。由于定子开槽引起的气隙磁导率谐波与由永磁体引起的磁动势(MMF)谐波之间的相互作用。调查主要集中在轴流PM(AFPM)机器上。各种技术存在并用于减小径向PM(RFPM)机器[6]-[27]的齿槽转矩,例如使槽和/或磁体偏斜,使用辅助槽或齿来移位和形成磁体,优化磁极 - 电弧到极间距比,采用每极数的分数数量,并给出正弦自屏蔽磁化分布等。这些最近进行了综述[28]。一些技术可以直接应用于AFPM机器[29]-[35]。然而,它们对制造成本的影响可能是令人望而却步的。因此,需要用于AFPM机器的替代低成本技术。在本文中,通过三维有限元分析研究了AFPM机器各种齿槽转矩最小化技术的实用性,并提出了几种新方法。
Ⅱ. 计算扭转扭矩
无论是否通过有限元分析(FEA)来确定催化剂的方法,可以用傅立叶级数[8]
(1)
theta;m是转子旋转位置,Tk和phi;k是谐波分量的幅度和相位,Nc是转子极数,2p与定子槽数之间的最小公倍数,Ns。当每极的槽数是整数时,Nc=Ns。
齿槽转矩可以通过使用麦克斯韦应力张量或虚拟工作技术的有限元分析来计算[36]-[40]。麦克斯韦的应力张量法具有每个齿槽转矩计算仅需要单场计算的优点。然而,可实现的准确性在很大程度上取决于离散化和集成路径。另一方面,虚拟工作方法通常更容易实现[36],然而,它需要智能计算,并且可以通过由两个相似的大的磁能值的差异产生的数值误差来实现。在本文中,采用三维有限元软件Maxwell根据虚拟工作原理计算齿槽转矩。然而,由于3-D建模通常用于分析AFPM机器中的脉动转矩[29]-[35],并且这仍然相对耗时[36],[37],尽可能地将分析技术与三维有限元分析相结合,以简化计算。这种方法的有效性已经在[27],[28],[41]-[44]中得到证实。例如,如果双转子AFPM机的一个转子相对于
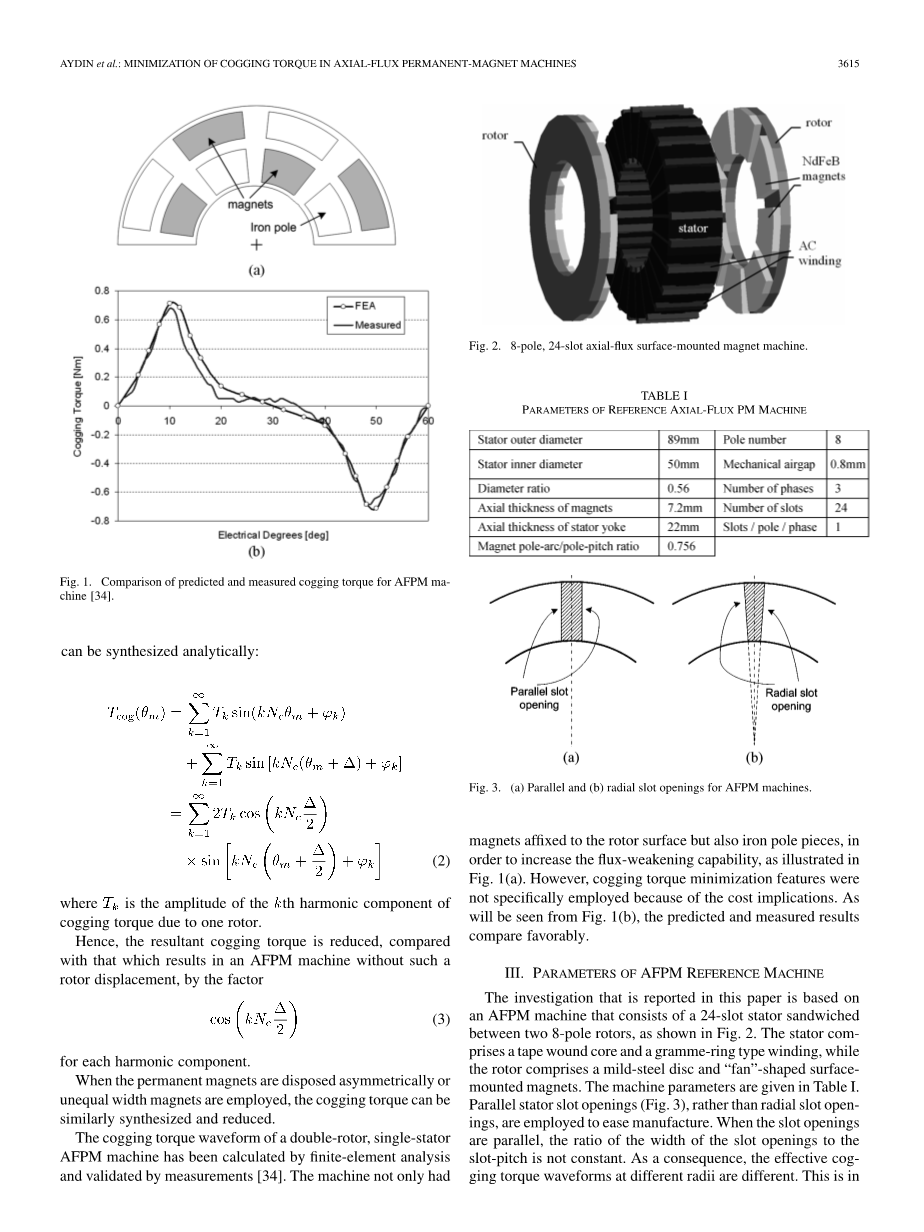
图1 AFPM机床预测和测量齿槽转矩的比较[34]
另一个转子偏移了一个角度,则产生的齿槽转矩可以分析合成:
(2)
Tk是由一个转子产生的齿槽转矩的谐波分量的振幅。
因此,与没有这样的转子位移的AFPM机器相比,所得到的齿槽转矩减小,按因子
(3)
对于每个谐波分量。
当永磁体被布置为不对称或不相等的宽度磁体时,可以类似地合成和减少齿槽转矩。
双转子,单定子AFPM机器的起动方式已经通过有限元分析计算,并通过测量验证[34]。
图2 2.8针,24槽轴向表面安装磁铁机
表1 参考轴流式PM机的参数
|
定子外径 |
89mm |
极数 |
8 |
|
定子内径 |
50mm |
机械气隙 |
0.8mm |
|
直径比 |
0.56 |
相数 |
3 |
|
磁铁的轴向厚度 |
7.2mm |
槽数 |
24 |
|
定子轭的轴向厚度 |
22mm |
槽/极/相 |
1 |
|
磁极-电弧/极点电台 |
0.756 |
图3 AFPM机器的(a)平行和(b)径向槽口
该机器不仅具有固定在转子表面上的磁体,而且还具有铁极片,以增加磁化弱化能力,如图1(a)所示。然而,由于成本的影响,没有具体使用齿槽转矩最小化特征。 从图1(b)可以看出,预测和测量结果相当有利。
Ⅲ. AFPM参考机的参数
本文报道的研究是基于一个AFPM机器,由一个夹在两个8极转子之间的24槽定子组成,如图2所示。定子包括打包式打包机,转子包括一个软钢盘和“风扇”形表面安装的磁铁。 平行平台(图3),相当于放射性半导体,被用于制造。通孔平行,槽开口宽度与槽间距的比率不是恒定的。 因此,不同半径处的有效齿槽转矩波形是不同的。这与通过径向槽开口产生的齿槽转矩波形相反,槽形开口的宽度与槽间距的比率保持与半径恒定。 因此,如后所述,适用于AFPM机器槽口的设计是减少扭矩的重要手段之一。
图4 参考AFPM机的齿槽转矩波形(每个扭矩点的有限元素数:170 176四面体,总计时间:25分钟,使用计算机:P4-1.8兆赫PC)
所考虑的AFPM机具有8.0Nm的峰值齿槽转矩,齿槽转矩波形如图 4所示。
Ⅳ. 加密扭矩最小化
如引言中所提到的,存在用于最小化齿槽转矩的众多技术,并且这些都被很好地记录在案。 然而,大多数用于减少RFPM机器中的齿槽转矩。 因此,在本节中,将详细介绍AFPM机床的齿轮转矩技术,并强调可能纳入AFPM机床设计以减少齿槽转矩的附加特性。
- 定子槽数与转子极数之比
在整体式老虎机中,每极的槽数为整数,每个转子磁体相对于定子槽具有相同的位置。因此,通过各种电磁场相位产生的齿槽转矩分量,这导致高的合成齿槽转矩。然而,在每个极点的槽数是非整数的分数老虎机中,转子磁体相对于定子槽具有不同的位置,并因此产生彼此不同相的齿槽转矩分量。因此,由于一些齿槽部件被部分抵消,所以产生的齿槽转矩减小。通常,优选采用在槽数与极数之间具有最小公共倍数的槽和极数组合[8]。然而,尽管分数槽设计对于RFPM机器是常见的,但是它们不适合于某些AFPM机器,例如由于格式环型(或背对背型)绕组布置而具有后续极转子的那些机器[34] 。
B.定子牙的虚拟插槽
降低定子齿的虚拟槽的技术[8],[20],减小了转矩的变化幅度,降低了转矩的频率。然而,这在制造过程中具有一定的优势,因此增加了成本。
图5 齿轮转矩波形的一个周期与磁极弧的变化
C.磁极偏转至极间距比
可以通过采用适当的磁极-极坐标-俯仰比来最小化齿槽转矩。齿轮转矩是通过磁极和定子的边缘之间的相互作用而产生的,既是脉冲波形形状依赖于电磁波的大小和形状。将磁极电弧减少到极间距比可以减少磁体泄漏,同时也减小了磁铁的平均转矩。 因此,通常需要妥协。另外,考虑到影响电磁波相关转矩波动的影响。
对于RFPM机器中最小齿槽转矩的最佳磁极弧[8]也适用于AFPM机器,即
(4)
当N=Nc/2p,p是极对的数量。然而在实践中由于液相渗漏的影响alpha;p略高于(4)中给出的。
图2所示的参考AFPM机的有限元预测齿槽转矩波形在图5为各种磁极弧,而图6为峰-峰幅度的变化。其中电弧极点为140电极。(alpha;p=0.778),峰值齿槽转矩为额定转矩的51%,而磁极弧为122.5电。(alpha;p=0.68),峰值齿槽转矩为最小值,并降低到额定转矩的5%。
图6 参考电机与磁极弧的峰-峰齿槽转矩的变化
D.常规倾斜:定子槽或转子磁铁
歪斜是减少齿槽转矩的最简单,最有效和常用的技术之一。它还降低了无刷交流电机的反电动势波形中的高次谐波。可以通过使定子槽或转子磁体偏斜来实现。如果磁体歪斜一个槽间距,齿槽转矩有效地变为零。 然而,虽然倾斜转子磁体在RFPM机器中相对困难,但是由于磁体变形复杂,因此在AFPM机器中磁体相对容易偏斜。 作为示例, 图7示出了AFPM机器转子上的倾斜和非烧结磁体,不偏心的磁体是ABCD,而倾斜的磁体是ABCrsquo;Drsquo;。
图7 倾斜磁体AFPM机器转子 磁铁ABCD偏向ABCrsquo;Drsquo;
用于最小化齿槽转矩的最小倾斜角为[8]
(5)
对于每个极点具有分数个槽数的机器,或者
(6)
对于每极具有整数个槽的机器。
虽然这样做可能会导致电压损耗(由于绕组长度的增加)而导致的漏电感增加。
一般来说,对于RFPM机器[8],峰值齿槽转矩随着倾斜角度的增加而逐渐减小。然而,由于AFPM机器的磁体的内外半径处的磁泄漏,所以具有最佳的偏斜角可能不完全如(5)和(6)所给出,而最小齿槽转矩可能不为零。作为示例,图8示出了从1/4槽间距到3/2槽间距的参考AFPM机械手轮的齿槽转矩波形的变化,图9示出了齿槽转矩的峰-峰幅度的变化。可以看出,峰值齿槽转矩随着倾斜角度的增加而减小,并且在歪斜角为18.75度的情况下是最小的。
图8 AFPM机器齿槽转矩波形的变化与磁偏斜角
图9 峰-峰齿槽转矩与磁铁倾斜角度的变化
E.替代磁铁歪斜技术
如图10所示,存在AFPM机器的磁体可能倾斜的各种方式。这些在接下来的四个部分进行了调查。
- 三角倾斜:通过使转子OD处的磁体的侧面更靠近在一起,同时转动到转子ID附近,引入倾斜,图11所示,从而在相邻的磁体之间形成三角形的空间。已经确定了齿槽转矩波形,其磁化面保持不变。从图12可以看出,在加工过程中不同程度地减少加工扭矩的增加,当机械转速达到峰值齿槽转矩时,齿轮转矩波动减小了84.3%。
- 平行侧磁体:也可以采用平行侧磁体来减小齿槽转矩,因为如图13所示,这导致相对于径向侧磁体的偏斜。
图10 磁铁倾斜的各种方式:(a)不偏心,(b)常规偏斜,(c)三角形偏斜,(d)平行侧磁体和(e)梯形偏斜
图11 三角扭曲
图12 齿槽转矩波形与角度theta;的变化
然后相邻磁体之间的距离大约由下式给出
(7)
Ri和Ro磁体的内半径和外半径,alpha;p是极弧到极间距比,p是级数。其应用于在具有低
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[26269],资料为PDF文档或Word文档,PDF文档可免费转换为Word
您可能感兴趣的文章
- 饮用水微生物群:一个全面的时空研究,以监测巴黎供水系统的水质外文翻译资料
- 步进电机控制和摩擦模型对复杂机械系统精确定位的影响外文翻译资料
- 具有温湿度控制的开式阴极PEM燃料电池性能的提升外文翻译资料
- 警报定时系统对驾驶员行为的影响:调查驾驶员信任的差异以及根据警报定时对警报的响应外文翻译资料
- 门禁系统的零知识认证解决方案外文翻译资料
- 车辆废气及室外环境中悬浮微粒中有机磷的含量—-个案研究外文翻译资料
- ZigBee协议对城市风力涡轮机的无线监控: 支持应用软件和传感器模块外文翻译资料
- ZigBee系统在医疗保健中提供位置信息和传感器数据传输的方案外文翻译资料
- 基于PLC的模糊控制器在污水处理系统中的应用外文翻译资料
- 光伏并联最大功率点跟踪系统独立应用程序外文翻译资料


