英语原文共 6 页,剩余内容已隐藏,支付完成后下载完整资料
用于车辆检测的传感节点数据的信号处理
Jiagen (Jason) Ding, Sing-Yiu Cheung, Chin-Woo Tan and Pravin Varaiya, Fellow, IEEE
摘要:在本文中,我们描述了一项用于车辆检测的实验工作,并提出了一种使用传感器节点数据进行车辆检测的算法。我们将声音信号和电磁信号用于这种信号处理。于是我们提出一种自适应阈值(ATA)的实时车辆检测算法。 该自适应算法首先计算时域能量分布曲线,然后利用一些决定性的自适应更新的阈值对能量曲线进行分割。最后,将阈值分割的决策结果传递给识别系统进行最终车辆检测判定。实时测试和离线仿真都表明我们所提出的算法是有效的。
- 简介
部署传感器来监测并测量一个系统的想法并不很新颖, 但是,对于一些技术性和经济性问题仍然具有一定挑战性。我们需要考虑很多问题,特别是为了收集信息和改进系统而多出来的成本。 例如,我们难道只能使用有线传感器收集我们想要的数据吗? 无线传感器具有灵活性优势,但就像任何便携式设备一样,但能源的限制一直都是不得不面对的问题。 我们可以部署具有高密度和保真度的仪器的传感器网络吗? 高密度的传感器是一个明显的好处,但也意味着更多的成本。 换句话说,大规模部署是否在经济上可行?所有这些问题可以分为相互关联的三类:成本,效益和技术限制。 这三个问题将决定用于诸如车辆检测应用的传感设备的选择。
车辆检测系统主要包括四个部件:用于感测车辆产生的信号的传感器,用于处理感测数据的处理器,用于将经处理的数据传送到基站进行进一步处理的通信单元和能量源。传统的车辆检测技术,例如电感式环路检测器,不适合进行大规模的部署,因为它们通常会被复杂的交通情况干扰并容易造成混乱,从而需要昂贵的安装费和维护费用。所以只有通过降低成本并降低从外界环境收集信息的复杂性,无线传感器技术才可以将传感器放在成本和实用性上,使其不再像以前一样发展。此外,随着微电子和MEMS技术的最新进展,车辆检测系统的四个主要部件现在都可以集成到一个称为传感器节点的微型单一设备中。这些传感器中的每一个节点称为Mote。将来,车辆检测系统可以由无线通信的自组织网络中互连的低成本传感器节点的网络组成。这可以通过控制能量源的功率消耗来发送和接收数据从而降低安装维护成本[8]。图1所示的一个这样的传感器节点是在加州大学伯克利分校电气工程与计算机科学系进行的Smart Dust研究项目下开发的[1,2]。这些无线传感器节点是电池供电的,所以预计有几年的使用寿命。因此,每个传感器节点本地处理传感器数据都是有作用的,并且仅将车辆检测结果发送回基站(或网关传感器节点)。这将降低传感器网络流量并拥有更长的运行寿命。接下来,我们整理了一下目前用于车辆检测的信号处理技术。
已经提出了很多种信号处理算法用于车辆检测[3,4,5]。这些算法用于检测车辆声信号,用于分析时域,频率和时频域三个方面。时域中的声信号处理,如波束形成[3]是一种自然的方法,但由于环境的复杂性而不是最佳的,即声信号的时域信息可能受其他噪声的影响例如移动的车辆,多普勒效应,风力作用等。频域信号处理算法集中作用在从20Hz到200Hz的频率范围内,其中车辆声学信号主要来源于两个部分:发动机和推进齿轮。基于这些特征,在[4,5]中开发了谐波线关联(HLA)算法。然而,由于车辆声信号不是平稳的,且没有宽带的,因此很难在频谱中选择峰值。因此,开发了时频域的其他方法,如基于小波的算法[5],但基于小波的算法不适合实时车辆检测,因为它们需要长时间的密集的计算和采样。使用电磁信号数据简单地进行车辆检测是一种使用固定阈值检测的算法[7]。该固定阈值算法不是很有效,因为电磁信号幅度会随车辆尺寸而变化。在本文中,我们提出一种适用于实时车辆检测应用的自适应阈值算法(ATA)。 ATA是基于时域能量分布的算法。该算法首先计算时域能量分布曲线,然后使用自适应实时更新的确定阈值对能量分布曲线进行分割。最后,由阈值分割得到的判断结果传递给有限状态机,从而对车辆进行检测判断。注意,ATA是具基于能量分布的自适应阈值选取算法,其使得其对环境噪声是无法处理的。 ATA也是一种实时车辆检测算法。
图1传感器节点,也称为Motes
本文的其余部分内容如下:第二部分讨论了用于车辆检测的无线传感器节点(Mote)的类型。 第三部分开发了用于车辆检测的自适应阈值算法(ATA)。 第四节演示了ATA车辆检测的仿真和实验结果。第五节是一些结语。
二、传感器编号
在我们的车辆检测实验中使用的传感器节点(Motes)由加州大学伯克利分校和英特尔公司的EECS部门共同开发[1]。 在摩托车中,车辆检测(处理器,存储器,传感器和无线电)的基本组件与一个四分之一硬币大小的电路板集成在一起(参见图1)。 Mote由两个主要组件组成:主板和传感器板。 传感器板包括声学传感器和磁性传感器,均用于我们的车辆检测实验。接下来将介绍声学传感器和磁力计的基本操作原理。
图2:电容麦克风示意图
- 声学传感器
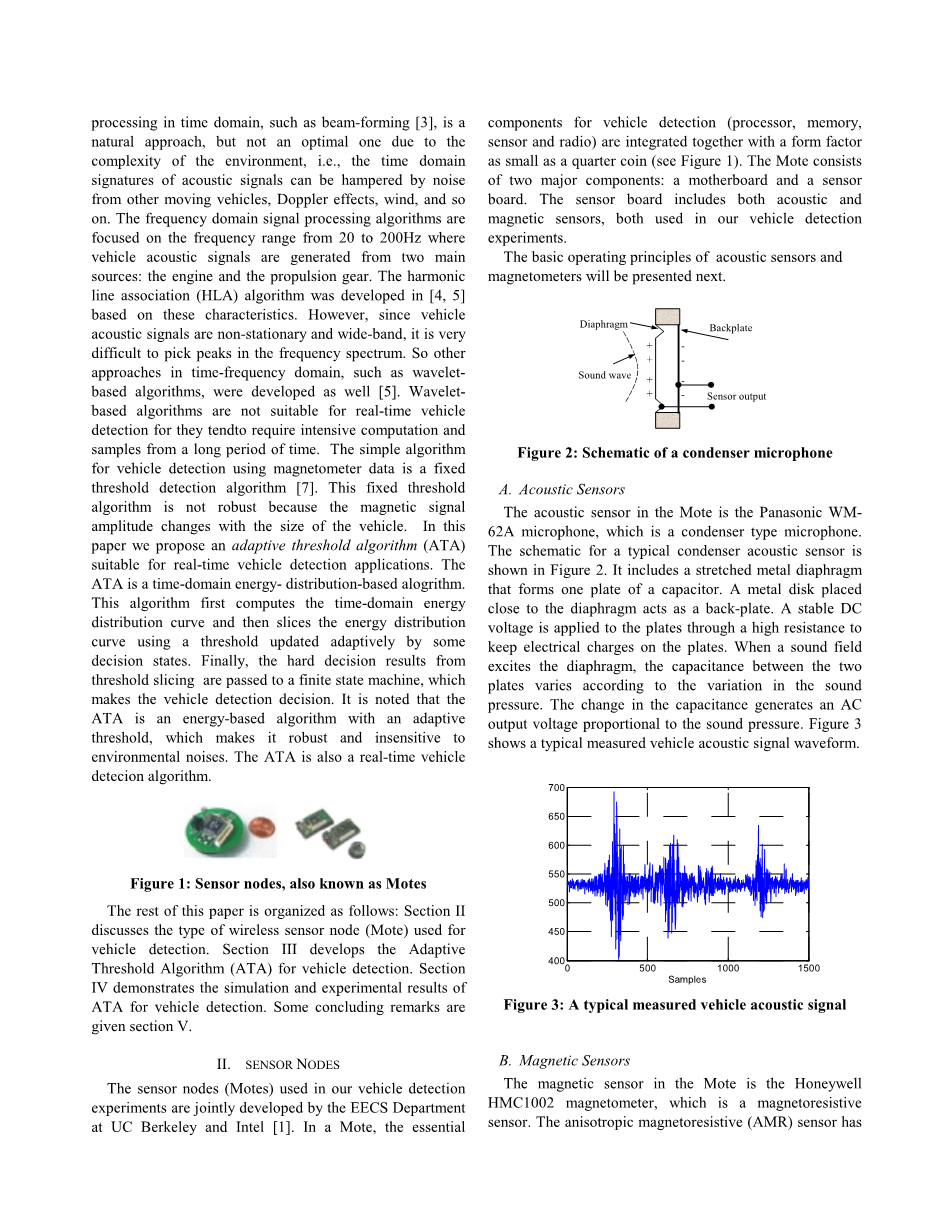
Mote的声学传感器是Panasonic WM-62A麦克风,它是一种电容式麦克风。 典型的冷凝器声学传感器的示意图如图2所示。它包括形成电容器板的拉伸金属膜片。 在隔膜附近的放置金属盘用作背板。 通过高电阻将稳定的直流电压施加到板上以保持板上的电荷。 当声场激发隔膜时,两个板之间的电容根据声压的变化而变化。 电容的变化产生与声压成比例地输出电压。 图3示出了典型的测量车辆声信号波形。
图3:典型的测量车辆声学信号
B.磁性传感器
Mote的磁传感器是霍尼韦尔HMC1002磁强计,它是一种磁阻传感器。各向异性磁阻(AMR)传感器具有广泛的应用范围,可以用于感测地球的磁场,并提供地球场的强度和方向[6]。图4显示了坡莫合金的磁阻效应。坡莫合金的电阻是偏置电流和磁化矢量(M)之间的角度(theta;)的函数。施加的磁场改变磁化矢量的方向,从而改变用于磁场感测的电阻。 AMR传感器由沉积在硅晶片上并被设计为电阻条的镍铁(坡莫合金)薄膜制成。通常,这些电阻条中的四条以惠斯通电桥结构连接,从而可以测量沿着单个轴的场的大小和方向。 AMR传感器的主要优点是它们可以在硅晶片上大量生产并安装到商用集成电路封装中。
图4:坡莫合金磁阻效应
图5示出了当车辆通过AMR传感器时沿着一个轴的地磁场的典型的变化。
图5:典型的测量车辆磁信号
- 自适应阈值算法
本节介绍自适应阈值检测算法。 该算法包括能量分布曲线的计算,能量信号的过滤,状态检测器和阈值自适应的算法。 自适应阈值检测算法的框图如图6所示。如图所示,Square&Decimator,Filtering,Adaptive Threshold and Decision分别对应于能量分布曲线计算,能量信号滤波,阈值适应和状态机检测器。
图6:自适应阈值检测方框图
A.能量分布计算
可能需要首先通过带通滤波器对原始测量的声或磁信号进行滤波,以去除环境噪声(图6中未示出),例如声音信号中的风噪声。 带通滤波器输出是平方的并且可以被抽取,这可以提取出能量信号。 该能量信号通过以下方式与相关:
(1)
其中N是抽取率。
B.平滑声能信号
能量信号可能非常容易被干扰,因此可以使用低通滤波器来平滑这个信号然后可用于稍后的检测。在我们的ATA算法中,低通滤波器被选为低通FIR滤波器,具有线性相位和稳定的优点。低通FIR滤波器关键设计参数由-3dB截止频率,阻带频率和阻带衰减组成。平滑的能量信号被传递到自适应阈值部分以进行判断。
图7:状态机检测器状态图
C.自适应阈值决策
如果输入样本大于当前检测阈值,则判定产生输出。 否则,判定将产生输出。阈值的值被自适应地更新,接下来将被解决。 首先,能量信号的移动平均值计算如下:
(2)
其中MA表示平滑的能量信号的移动平均值,M是移动平均样本的数量。 自适应阈值如下更新:
如果当前的决定状态处于“车”状态:
否则:
其中和是用于调整移动平均值的两个参数,是用于延迟移动平均值的整数移动平均值,是设置最小阈值的常数。 注意,自适应阈值是过去能量水平的延迟移动平均值,它与判定状态相对应。 我们接下来讨论如何计算判定状态。
D.状态检测器
图7显示了与图6所示决策块相对应的状态机的状态图。
状态机包括:
输入状态被定义为:,如果,则
每个状态的计数器为,每个状态下的计数器将在状态机从其他状态跳回时复位。如果输入保持为0,则状态机从状态开始并停留在该状态。如果输入为1,,则状态机从状态跳转到状态。当状态机进入状态计数1时,如果输入为1且前一个计数器值小于,则计数器计数并且状态机保持在该状态。如果输入为0,则状态机从跳到,如果输入为1,并且先前的计数器值不小于,则该状态机从有汽车跳转。当状态机进入状态时,如果输入为0,前一个计数器值小于,则此状态下的计数器计数,状态机停留在该状态。状态机从跳到如果输入为1,并且如果输入为零并且先前的计数器值不小于,则状态为停车。当状态机进入状态车时,如果输入为1,则它将保持在该状态如果输入为0,则跳转到。当状态机进入状态时,此状态下的计数器会向上计数,如果输入为0,并且先前的计数器值小于该状态机,状态机将保持此状态。状态机如果输入为1,则从跳到计数车,如果输入为零,并且前一个计数器值不小于当状态机从状态计数1从状态1跳到有车状态时,检测到车辆。
注意,状态和参数和的计数器在检测中引入滞后,这将使得算法对短脉冲的判断错误更加严重。
- 模拟和在线实验
- 声信号车辆检测
本节将通过仿真和实验演示ATA算法。 将该算法在基于笔记本电脑的系统中进行原型制作,如图8所示。实时测试和离线模拟结果都是为此原型系统提供的。 其次,由于Mote系统中有限的计算资源使得实时测试变得困难,所以仅为Mote测量的声信号提供离线算法模拟。
图8:基于笔记本电脑的声学车辆检测
图9显示了自适应阈值算法的一些实时车辆检测结果。 这个决定结果是在1.8,4,6.8,8.2,10,12和14秒各时间点上,表示那些时刻的车辆存在。 状态转换轨迹中的状态0,1,2,3和4分别对应于无汽车,有汽车,计数器0,计数器1和计数器100的状态。 注意,自适应阈值算法给出了正确的实时检测。 图10显示了长时间ATA仿真结果的快照。 在该图中,蓝线对应于能量分布曲线,红线对应于阈值曲线。接下来我们研究参数选择对ATA声学车辆检测性能的影响。 关键参数是图7等式3中的计数器极限(和)和阈值调整系数(和)。
图9:ATA声学检测
表1总结了和对= 0.7,= 1.5的ATA声学车辆检测结果的影响。可以是注意到,大的和可以形成更好的误差性,但可能会检测不到高速车辆。 应该选择和来计算算法鲁棒性和可检测车辆的速度范围。 一个小的可能导致由于噪音引起的1分钟的短暂爆发,而大的可能导致快速车辆的漏检。 另一方面,一个小的可能由于噪音而导致超量计算,而当两辆车彼此非常接近时,大的可能会造成较差的分辨率。
表1:Ms和Ns对ATA的影响
|
(Ns,Ms) |
Ground truth |
Detection result |
|
|
(# of vehicles) |
(# of vehicles) |
||
|
(10,10) |
63 |
62 |
|
|
(10,15) |
63 |
64 |
|
|
(10,20) |
63 |
62 |
|
|
(20,10) |
63 |
60 |
|
|
(15,10) |
63 |
62 |
|
|
(10,10) |
63 |
63 |
|
|
(6, |
10) |
63 |
70 |
偏移T offset = 2e-5。 Md选择为20的时候,平滑滤波器平均移动了40。要注意的是对alpha;和beta;的选择相当重要。
B.摩擦声学车辆检测<!--
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[25973],资料为PDF文档或Word文档,PDF文档可免费转换为Word
您可能感兴趣的文章
- 饮用水微生物群:一个全面的时空研究,以监测巴黎供水系统的水质外文翻译资料
- 步进电机控制和摩擦模型对复杂机械系统精确定位的影响外文翻译资料
- 具有温湿度控制的开式阴极PEM燃料电池性能的提升外文翻译资料
- 警报定时系统对驾驶员行为的影响:调查驾驶员信任的差异以及根据警报定时对警报的响应外文翻译资料
- 门禁系统的零知识认证解决方案外文翻译资料
- 车辆废气及室外环境中悬浮微粒中有机磷的含量—-个案研究外文翻译资料
- ZigBee协议对城市风力涡轮机的无线监控: 支持应用软件和传感器模块外文翻译资料
- ZigBee系统在医疗保健中提供位置信息和传感器数据传输的方案外文翻译资料
- 基于PLC的模糊控制器在污水处理系统中的应用外文翻译资料
- 光伏并联最大功率点跟踪系统独立应用程序外文翻译资料


