
英语原文共 8 页,剩余内容已隐藏,支付完成后下载完整资料
短期无人机路径规划与单周期惯性SLAM的循环
Ignacio Alzugaray,Lucas Teixeira
玛格丽塔Chli视觉机器人实验室,瑞士苏黎世联邦理工学院
摘要:小型无人机(UAV)由于其高机动性,是各种应用中最有前途的机器人平台。然而,有限的计算和有效载荷能力,让它们在自动化导航方面受到重大挑战。随着同步定位与地图构建(SLAM)系统最近被证明可以在机载无人机上使用,重点放在实现自主导航的路径规划上。由于大量的路径规划文献通常假定先验已知的完美地图或地图,因此最大的挑战在于处理实际任务中机载SLAM的鲁棒性和准确性限制。基于这种想法,本文提出了一种路径规划算法,设计用于单目惯性系统的SLAM估计循环。该点对点规划器演示了使用增量生成的SLAM地图在未知环境中导航,同时指示导航策略获取传感器数据,以便在SLAM内更好地估计。对模拟数据和真实数据进行了全面的评估试验,展示了所提出的管道与现有技术相比,稳健性提高并且显着降低的计算复杂性,揭示了其对无人机导航的适用性。
背景介绍
由于具有革命性任务的潜力,例如搜索救援,3D建模和工业检测,小型无人机(UAV)最近引起了学术界和工业界的极大关注。多旋翼无人机由于其高机动性和重量轻而特别有趣,有希望快速进入偏远地区而无需任何特定的基础设施(例如铺设的道路)。尽管如此,它们的特性是以有限的有效载荷为代价的,限制了可以携带的传感器和处理器的数量,总重量和功耗,因此限制了机载计算能力和传感能力。用于这些机器人平台的一些最有希望的用于无人机的传感器是相机,因为它们相对较轻的重量,小尺寸和低成本,因为它们提供关于其周围环境的丰富信息。
随着基于视觉的同步定位与地图构建(SLAM)技术[1]的开创性进步,证明了使用视觉线索可以实现自我运动场景估计,他们在UAV上使用[2]一直是无人机导航自动化研究的关键。由于路径规划构成了完成机器人导航难题的最后一环,社区最近已经转向大量的理论路径规划工作来设计计算上可行的方法,尽管传统上假设已知的或预先获得可用性的地图。虽然出现了一些强大的系统,但是无人机上的计算复杂性受到限制,真实任务中产生的感知不确定性构成了最大的挑战,阻碍了这些方法在实际中的实际应用。为了开发一种可行且优选的导航策略,实时利用SLAM系统中处理的感知线索,如本文所倡导的那样,在激励无人机导航以及推动平台功能方面开辟了一个巨大的潜在优势。更大的导航自主权。
在本文中,我们采用了基于关键帧的SLAM系统,该系统融合了单筒摄像机和UAV传感器套件上的惯性测量单元(IMU)的传感线索。由于SLAM地图是在整个飞行过程中逐步生成的,因此我们开发了一个路径规划器,可以在发现新的未探测环境区域时随时处理计划中的变化。在实际任务中,具备这种重新计划能力的特别重要,因为人们永远不能假设甚至预先获得的环境地图也不会改变。因此,所提出的系统的这一特性对于确保该框架的适用性和稳健性至关重要。虽然所提出的方法与所使用的特定单眼惯性SLAM(MIS)系统无关,但在本文中,我们使用[3][4]的基于开源1关键帧的SLAM系统进行实验。图1中显示了拟议管道的快照。在真正的任务中,人们永远不能假设甚至一个预先获得的环境地图也不会改变。因此,所提出的系统的这一特性对于确保该框架的适用性和稳健性至关重要。虽然所提出的方法与所使用的特定单眼惯性SLAM(MIS)系统无关,但在本文中,我们使用[3]和[4]的基于开源1关键帧的SLAM系统进行实验。图1中显示了拟议管道的快照。
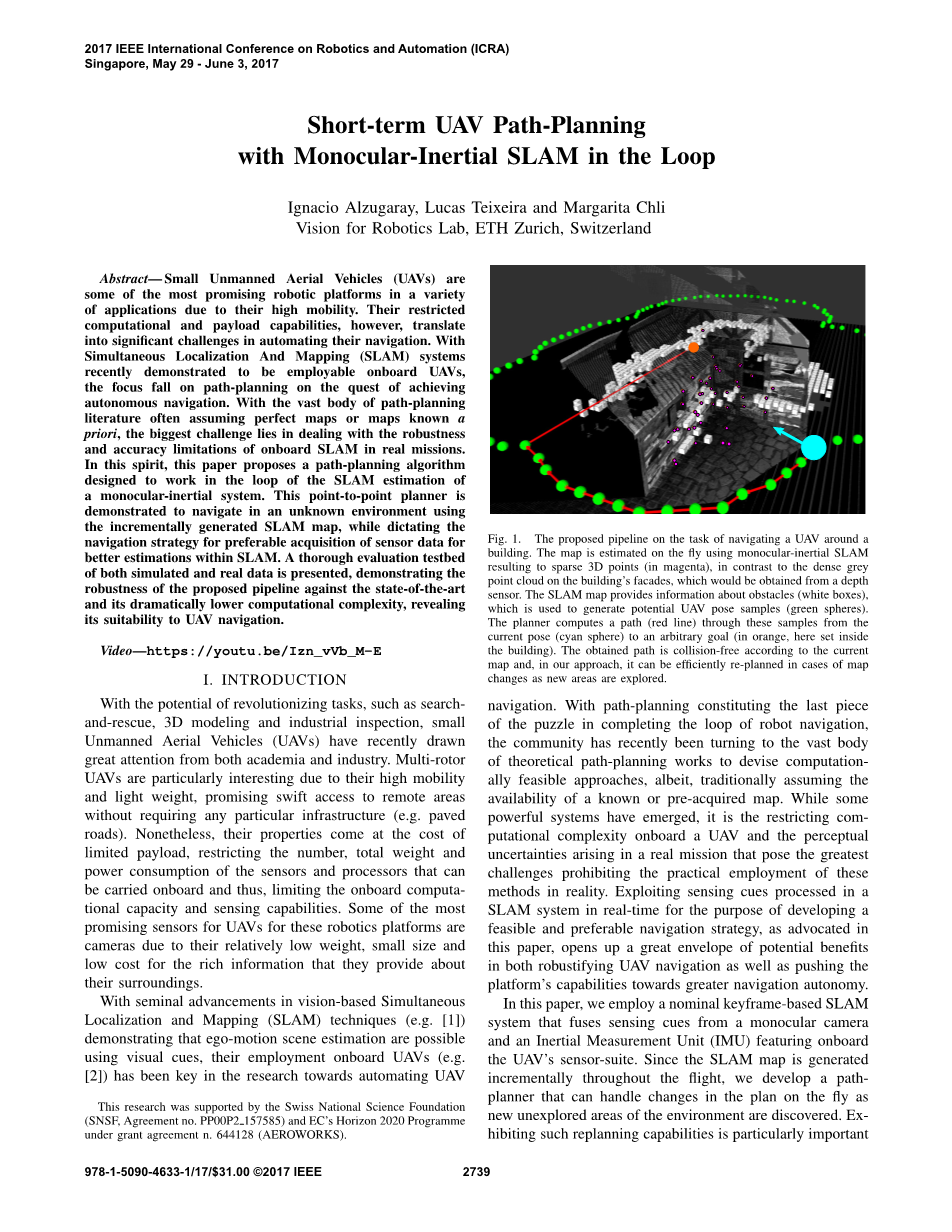
图1.关于在建筑物周围导航无人机任务的拟议管道。使用单眼惯性SLAM动态估计地图,导致稀疏的3D点(洋红色),与建筑物立面上的密集灰点云形成对比,这将从深度传感器获得。SLAM地图提供有关障碍物(白框)的信息,用于生成潜在的无人机姿势样本(绿色球体)。计划者计算通过这些样本的路径(红线),从当前姿势(青色球体)到任意目标(橙色,这里设置在建筑物内)。根据当前地图获得的路径是无碰撞的,并且在我们的方法中,在探索新区域时,可以在地图变化的情况下有效地重新规划路径。
传统上,SLAM方法依赖于跟踪机器人轨迹上的特征,从而导致构建机器人工作空间的稀疏SLAM图。当使用单个相机作为唯一的外部感知传感器时,当使用诸如立体相机的附加传感器时,该SLAM图非常嘈杂,因为特征的深度估计变得对连续图像上的视差特别敏感。结果,相机的轨迹以及这些特征在空间中的分布(例如,足以覆盖障碍物)对所获取的SLAM图的保真度具有很大影响。虽然这些因素对SLAM都构成了巨大的挑战,因此,在任何旨在实时使用SLAM地图的路径规划器中,所提出的方法明确利用了障碍物周围特征的潜在不均匀分布来指导路径规划决策,同时有利于有益相机运动可提供强大的SLAM性能。
无人机真实任务环境中的路径规划
在没有先验地图的情况下规划是最重要方面之一,因此在动态构建的地图上进行规划,是考虑遵循点对点路径的规划可能会过时,因为新区域的环境在被探索并且新的障碍在被发现。因此,对于旨在结合这种仅提供无人机周围环境的部分知识的地图的算法,在合理的时间内根据地图的改变来重新规划UAV的路径(小型无人机上存在的车载CPU,如AscTec Neo2)的能力是必要的。具有重新规划能力的最常用的路径规划算法之一是ADA * [5],成功地用于[6]中的无人机导航。由于ADA *依赖于密集连接的图形,通常由地图的单元网格分解生成,因此其可扩展性受到所考虑的地图大小和网格分辨率的严重限制。
基于网格的方法的替代方案是随机抽样方法,其在机器人社区中变得越来越流行,特别是自快速探索随机树(RRT)的发展[7]。最近开发的RRTX方法[8]允许计划路径适应地图中的变化,同时保证关于成本函数的无症状最优性,因为它基于成功的RRT*[9]方法。该算法的快速重新计算能力主要通过以下方式实现记录树的不同样本之间的替代连接,用于新感知的障碍物触发计划路径的修改的情况。在本文所针对的场景中,这种方法的一个主要缺点是RRTX生成的树根植于固定的目标位置,这意味着如果在执行任务期间修改任务目标,则需要重新运行从头开始的完整管道。此外,虽然在RRTX优化的成本函数中嵌入一些有价值的MIS信息可能会很有意思,但是在成本函数中包含任何这样的度量会明显增加该算法的计算成本,况且此算法的计算成本本身就很高,这就使得它不能在在无人机的CPU上执行。
直到最近,将SLAM信息明确地整合到路径规划中的方法才开始出现,导致文献中只有少数相关的工作。在[10]中,所提出的方法应用于无人机导航,使用视觉线索和快速探索随机信任树[RRBT] [11],其考虑机器人沿着通过机器人和测量模型预测的生成路径的不确定性。这些信息丰富的路径根据已知的地图进行规划,以便沿着估计的路径预测未来的传感器测量结果,因此,在地图变化的情况下,所选择的计划永远不能适应。[10]的另一个主要缺点是算法的高计算复杂性,使其仅在强大的工作站上计算可行。
与本文最相关的可能是最近提出的后退时期下一个最佳视图规划器(NBVP)[12]。设计用于勘探和检查任务,这种基于RRT的方法在规划循环内考虑从树的每个节点中的深度传感器检索的视觉信息。采用后退范围方法,根据该方法,在每个规划迭代中,一次只执行朝向下一个最佳视图的轨迹的一小部分,允许其在探索地图的新部分时在迭代之间调整计划。然而,为了从RRT获得最佳视图而对视图的评估是应用于RRT中的所有节点的昂贵步骤,因此,它可能与树大小一起缩放。受到NBVP的重新规划能力的启发,我们采用了后退时域方法,同时采用了更为适用的,尽管噪声更大的单眼视觉惯性传感器设置。尽管如此,我们的实验结果证明了所提出的方法在检查任务中对NBVP的优越性能。
建议的方法
让我们将定义为导航机器人的所有可能状态配置xi;isin;Xi;的集合。机器人的第i个状态定义为,其中是其位置矢量,是其航向角或偏航。这里的目的是产生点到点无碰撞路径,其将个离散状态的序列从当前机器人状态连接到目标状态。让我们定义应用使得,是线性插值轨迹连接状态和,即和。采用[12]中的后退水平方法,我们在每个计划迭代中计算机器人的下一个最佳移动,其对应于从完整计划获得的第一轨迹段。在执行第一轨迹段之后,调用新的计划迭代直到机器人达到目标状态。拟议管道的步骤如图2所示。尽管此处介绍的算法与所使用的机器人平台无关,但它的设计考虑了高机动性机器人,这些机器人具有严重受限的机载计算能力,例如无人机。
图2.算法管道被馈送由标称单目惯性SLAM(MIS)系统产生的稀疏和噪声映射。该MIS图被转换为可处理的障碍物,随后用于生成分布在它们周围的样本。这些样本的位置是相关的,因为我们假设MIS可以使用的大多数视觉特征都位于地图障碍物中。建立连接这些样本以及当前和目标位置的图表。然后在该图中搜索朝向目标的全局计划。最后,我们使用当前状态之后的位置来指定下一状态的最佳方向并计算下一个轨迹段。在算法执行下一个轨迹段之前,它会检测是否存在任何碰撞风险。如果是,则计算并执行到恢复状态的新轨迹段。
地图管理
假设标称MIS系统与提议的管道并行运行,我们系统的输入是由MIS生成的稀疏和噪声映射,其形式是沿着摄像机的执行路径检测到的3D点集合。为了将此输入转换为我们可以处理的障碍,我们还并行运行概率3D占用图表示[13],以便在采集时将噪声测量结果滤除。以下小节我们将描述如何预处理此地图数据,以围绕MIS地图中感知的障碍生成新的位置样本。
障碍物检测
在计划迭代开始时,我们处理当前的当前概率占用网格,以检索所有单元被占用的概率。具有高于阈值的概率的单元将被转移到常规占用网格图中,并且在我们的算法中稍后被视为障碍单元。该占用网格在不同的规划迭代期间被维护,并且仅根据概率占用图的变化而更新。
在转移所考虑的占用单元时,我们还可以应用不同的策略来提高算法的性能。例如,我们可以对概率占用图和我们在算法中使用的实际占用网格图使用不同的分辨率,允许我们对环境进行子采样。
虽然所提出的方法可以使用完整机器人在3D空间中执行,但是多旋翼无人机通常在正常导航期间被限制在空间中的单个旋转自由度,即,通常采用滚动和俯仰角度的变化来产生运动,而偏航角决定了机器人的方向。因此,在本文中,我们关注给定高度的2D导航规划。在这种情况下,我们只考虑在这个高度导航时可能存在于机器人路径中的障碍物,并将它们投射到2D占用网格上,如图3所示。
图3. 2D导航的地图分割。形成概率占用图(灰色框)的占用单元根据固定的导航高度(黄色平面)被分段。然后将可能与机器人碰撞的相关单元(绿框)投影到表示算法中考虑的地图障碍的2D占用网格上。
样品生成
由占用网格的占用单元表示的障碍用于在它们周围生成位置样本。这些障碍是MIS设置中的视觉特征的来源,因此,在它们附近导航可以导致更强大的整体性能。
围绕障碍物的样本的生成是使用稀疏切向网络(SPARTAN)方法的一部分来完成的[14]。受到SPARTAN低复杂性的启发,我们采用了其采样方法的实现。基于表示环境障碍物的占用网格图,计算从每个单元到最近的占用单元的距离,直到最大距离。在距离最近障碍物的给定间隙距离处产生样本,但是不比距离更接近另一样本。
采用这种方法背后的主要动机是使用所谓的波前传播生成样本,当代表障碍物的占用网格的单元从占用状态改变为空闲状态或反之亦然时,触发采样。由于在计划迭代之间状态可能改变的最大单元数量根据视觉传感器同时检索的图像帧的数量而受到限制,因此样本生成步骤的计算时间也是有时间限制的。
另外,在远离它们的给定恒定距离处围绕障碍物采样也改善了MIS性能,因为在导航期间使用类似比例跟踪大多数视觉特征。
图形管理
基于前一节中计算的样本的位置,我们构建了一个图形结构,并在随后的计划迭代期间对其进行维护。最后,在每次迭代中,我们在图中搜索将当前机器人位置连接到最终目标位置的个位置的最佳序列。
图生成
设表示定义为的无向图,其中是顶点集,是边集。每个顶点基本上代表位于自由空间中的样本,而每个边缘表示顶点和之间的无碰撞连接,即位置和
如果在地图中它们之间存在直接的无碰撞连接,我们建立连接半径为的球体内的不同顶点的边。形式上,边缘集的定义如下:
其中是根据当前映射评估位置和之间的直接连接是否无冲突的函数。该功能可以考虑用于碰撞检测的其他参数,例如机器人的尺寸。
请注意,在我们的方法中,中的集合顶点与上一节中生成的样本集匹配。由于样本仅分布在地图障碍物周围,因此连接的稀疏度和密度低于使用例如随机采样。这对几个操作的计算时间有直接影响,例如图搜索或图变异。
除了在障碍物周围产生的样本之外,当前机器人位置和目标位置也包括在顶点集合中;这些分别是顶点和。根据(1)设置的连通性,而忽略距离限制连接目标顶点。由于目标位置周围的区域可能最初未被探测,如果其连接仅限于,则可能没有附近的样本要连接。相反,我们使用当前的顶点集向目标前进,假设随着勘探的进展将生成新的样本。
图表更新
从头开始生成新图形,特别是在评估可能边缘时的碰撞检测是昂贵的操作。在我们的方法中,第3.2节中描述的方法仅根据局部地图变化修改样本集,而其他样本保持在相同位置。因此,如果我们根据这些变化修改顶点集合,我们可以在不同的计划迭代之间重用相同的图形。
请注意,使用此方法,先前计划迭代中添加的顶点之间的连接不会根据映射更改进行更新,因为它们的连接已经建立。由于在每次迭代中保持最新的连接性将是一项代价高昂的操作,因此我们会延迟评估每个顶点的连接性,直到需要由机器人执行。这将在下一节中详细说明。
图5.使用欧几里德距离(黄色)和二次欧几里德距离(红色)连接当前机器人位置(青色)和目标位置(橙色)的最佳路径搜索。图形的顶点描绘为球体(绿色),边缘描绘为线条(
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[20386],资料为PDF文档或Word文档,PDF文档可免费转换为Word
您可能感兴趣的文章
- 饮用水微生物群:一个全面的时空研究,以监测巴黎供水系统的水质外文翻译资料
- 步进电机控制和摩擦模型对复杂机械系统精确定位的影响外文翻译资料
- 具有温湿度控制的开式阴极PEM燃料电池性能的提升外文翻译资料
- 警报定时系统对驾驶员行为的影响:调查驾驶员信任的差异以及根据警报定时对警报的响应外文翻译资料
- 门禁系统的零知识认证解决方案外文翻译资料
- 车辆废气及室外环境中悬浮微粒中有机磷的含量—-个案研究外文翻译资料
- ZigBee协议对城市风力涡轮机的无线监控: 支持应用软件和传感器模块外文翻译资料
- ZigBee系统在医疗保健中提供位置信息和传感器数据传输的方案外文翻译资料
- 基于PLC的模糊控制器在污水处理系统中的应用外文翻译资料
- 光伏并联最大功率点跟踪系统独立应用程序外文翻译资料


