
英语原文共 12 页,剩余内容已隐藏,支付完成后下载完整资料
基于资源Sat-1(IRS-P6)AWiFS和LISS-III
传感器对Landsat-7 ETM 和Landsat-5 TM的交叉定标
Gyanesh Chander,Pat L. Scaramuzza
摘要:越来越多的来自多个传感器的数据被用于更全面地了解各种尺度的陆地表面过程。Landsat卫星系列收集了最长的多光谱数据连续档案。ResourceSat-1卫星(也称为IRS-P6)于2003年10月17日发射到极地太阳同步轨道。它携带三个遥感传感器:高分辨率线性成像自扫描仪(LISS-IV),中等分辨率线性成像自扫描仪(LISS-III)和高级宽场传感器(AWiFS)。
这三个传感器一起使用以提供具有不同分辨率和覆盖范围的图像。为了解IRS-P6 AWiFS和LISS-III传感器的绝对辐射校准精度,将这些传感器的图像对与Landsat-5 TM和Landsat-7 ETM 传感器进行了比较。该方法涉及基于来自两个传感器同时观察到的区域的图像统计来校准几乎同时的表面观察。
关键词:Landsat,TM,ETM ,IRS-P6,ResourceSat-1,AWiFS,LISS-III,校准,表征,光谱带,RSR,反射率
1引言
Landsat计划始于1972年,在七代任务中提供连续,一致的地球表面特征测量。Landsat-5(L5)和Landsat-7(L7)卫星目前正在运行。印度遥感卫星(IRS)星座计划由三颗当前运行的卫星组成:RESOURCESAT-1(IRS-P6),IRS-1C和IRS-1D。
1.1 Landsat-5(L5)专题制图仪(TM)
L5 TM是一种地球成像传感器,于1984年3月1日发射。它结合了先前Landsat上飞行的多光谱扫描仪(MSS)的光谱,辐射和几何能力。板载两个成像传感器,MSS和TM。L5 TM波段1-5和7有16个探测器,中心波长分别约为0.49,0.56,0.66,0.83,1.67和2.24mu;m。波带1-4的探测器位于主要焦平面(PFP),温度不受控制,但通常在292和300 K之间变化.5,6和7频段的探测器位于冷焦点飞机(CFP)。由于它们的波长相对较长,因此探测器材料的内部热激发会产生高噪声信号。为了最大限度地降低噪声并充分检测场景能量,辐射冷却器将CFP温度保持在95到105 K.内部校准器(IC)作为L5 TM的板载辐射校准系统。MSS和TM的板载校准使用灯来校准反射带和黑体源以校准热带。
1.2 Landsat-7增强型专题制图仪(ETM )
ETM 传感器于1999年4月15日在L7平台上发布; 它基于Landsat-4(L4)和L5卫星上的TM传感器。ETM 传感器的变化包括新的全色波段,热带的空间分辨率增加到60米,以及增加两个校准设备以帮助改善辐射校准。L7 ETM 有三个车载校准装置:全孔径太阳能校准器(FASC),这是一个白色涂漆扩散板; 部分孔径太阳能校准器(PASC),它是一组光学器件,允许ETM 通过小孔对太阳成像; 内部校准器(IC)由两个灯,一个黑体,一个快门和光学器件组成,用于将能量从校准源传输到焦平面。L7任务的要求之一是在传感器辐射率1的不确定度小于5%的情况下实现ETM 数据的辐射校准精度。这一要求比以往对Landsat计划的要求更为严格。
1.3 ResourceSat-1高级宽场传感器(AWiFS)和线性成像和自扫描传感器(LISS-III)
ResourceSat-1(IRS-P6)是一个三轴身体稳定卫星。它的使用寿命为五年,处于近极地太阳同步轨道,平均海拔817公里。其有效载荷由三个传感器组成:LISS-III,AWiFS和高分辨率多光谱相机(LISS-IV)。所有三个传感器都采用“推扫式扫描”概念,使用电荷耦合器件(CCD)的线性阵列。在这种操作模式中,图像的每一行都是电子扫描的,并且连续的线由卫星的前向运动成像。RESOURCESAT-1的独特之处在于这三种不同分辨率和宽度的传感器位于同一平台2上。LISS-III:LISS-III是一种多光谱相机,工作在四个光谱带中,三个在VNIR波段,一个在SWIR区域,空间分辨率为23.5米,地面条带为141千米。LISS-III传感器是一个天体般的传感器,可提供24天的重访周期。AWiFS摄像机在与LISS-III相同的四个光谱带中工作,在最低点提供56米的空间分辨率,覆盖740公里的地面条带。为了覆盖这个宽幅区域,AWiFS摄像机分为两个独立的电光模块AWiFS-A和AWiFS-B。
2相对光谱响应(RSR)
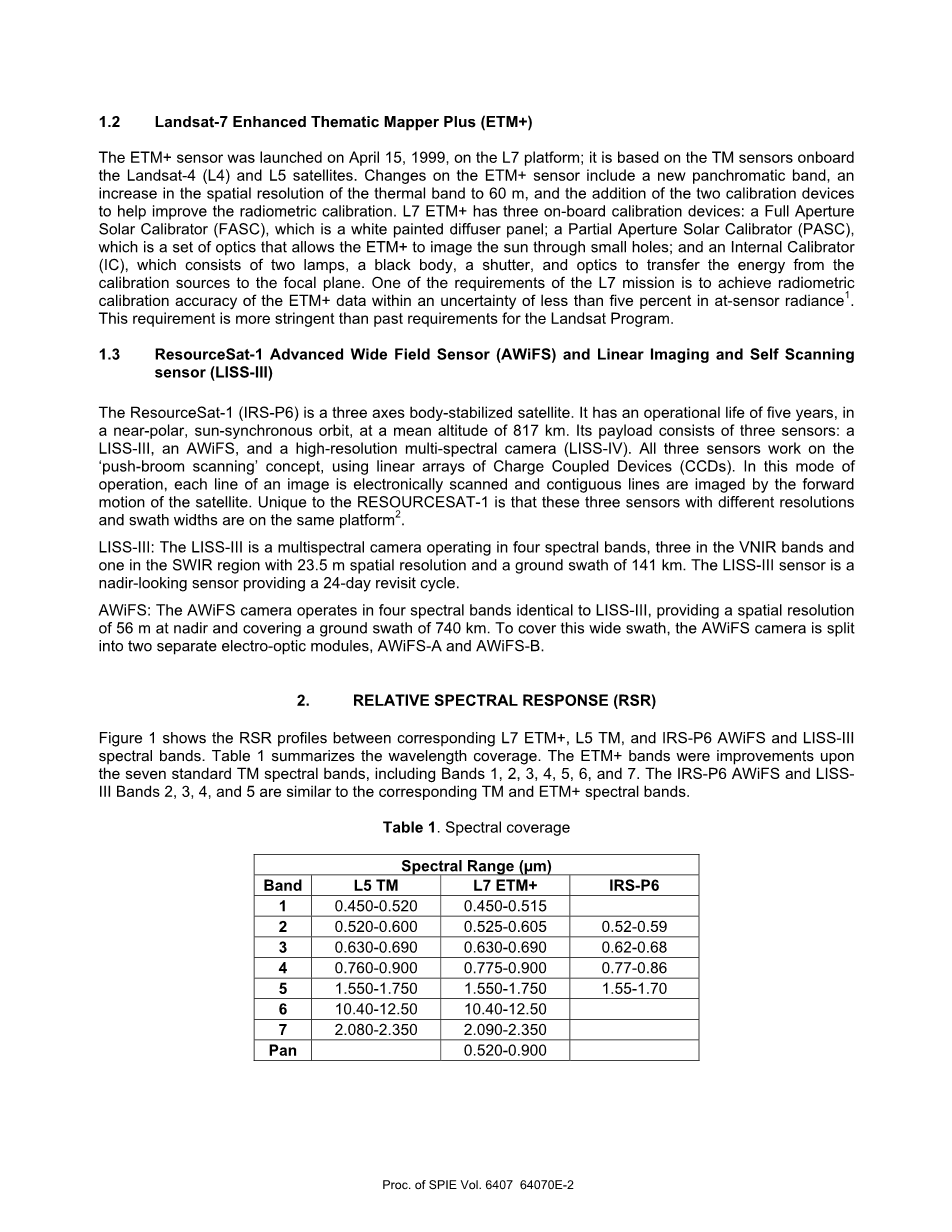
图1显示了相应的L7 ETM ,L5 TM和IRS-P6AWiFS与LISS-III光谱带之间的RSR曲线。表1总结了波长范围。
ETM 频段是对7个标准TM光谱带的改进,包括1,2,3,4,5,6和7频段.IRS-P6AWiFS和LISS-III频段2,3,4和5是相似的 到相应的TM和ETM 光谱带。
3 LANDSAT和IRS图像
本节总结了用于评估的数据集。
3.1太阳同步轨道
L5和L7卫星在赤道的标称高度为705公里(438英里)的重复,圆形,太阳同步和近极轨道上运行。太阳同步轨道意味着在给定区域内的所有采集都在一天的同一时间发生。
下行过程中的赤道穿越时间(降落的通道位于地球的阳光照射侧,上行通道始终位于轨道的黑暗面)对于所有Landsat任务,在当地时间9:30至10:00之间。以7.5千米/秒的速度绕地球运行,每个轨道需要近99分钟。该航天器每天完成超过14个轨道,每16天覆盖整个地球,北纬81度,南纬度为81度,在世界参考系统(WRS-2)上每循环完成233个轨道。IRS-P6卫星在一个圆形,太阳同步,近极轨道上运行,倾角为98.69度,海拔817千米。卫星需要101.35分钟才能绕地球完成一次旋转,每天完成大约14次轨道,地面轨道速度为6.65 km / sec。在24天的周期内,整个地球被341个轨道覆盖。
3.2测试网站描述
由于这些传感器之间的重合图像对的数量有限,这些研究的场景选择被证明是一个挑战。由于缺乏近井同时可用的特征和传统使用的校准和应用评估站点的图像,研究了具有高反射率,大动态范围,高空间均匀性,高太阳高度和最小云层覆盖的替代场地。因此,为当前工作选择的最终场景是在亚利桑那州梅萨和犹他州盐湖城。
1)亚利桑那州梅萨:在Mesa,2005年6月29日收购了无云的IRS-P6 AWiFS和LISS-III场景。大约30分钟后,获得了5个L7场景,覆盖了相同足迹的一部分。它在全球参考系统(WRS-2)中以路径36和行35-39引用。
2)犹他州盐湖城:在盐湖,2005年6月19日收购了无云的IRS-P6 AWiFS和LISS-III场景。大约30分钟后,获得了三个L5场景,覆盖了部分AWiFS足迹。它在WRS-2系统中引用,路径38和行30-32。
在两个测试站点中,针对每个可用图像源评估所有图像共同的区域。表2列出了为研究选择的场景,以及场景ID编号,位置,路径,行,采集日期和时间以及场景的太阳仰角。
3.3数据处理系统
校正调整的场景用于本研究。地形校正包括辐射测量,几何校正和精确校正,以及使用数字高程模型(DEM)来校正由于局部地形起伏造成的视差误差。地形校正产品的准确性取决于当地地面控制点(GCP)的可用性,以及最佳可用DEM的分辨率。然后在输出到分配介质之前将绝对辐亮度值缩放到校准的数字数字。L7 ETM 和L5 TM的数据量化是8位。TM和ETM 的1G(L1G)级产品仅适用于Landsat传感器的8位值。LISS-III的L1G产品有8位值。但是,AWiFS数据产品有8位和10位值。
3.4转换为反射
传感器不直接测量辐射。相反,它们记录的数量一旦校准,就等于或与辐射线性相关。探测器对地球表面辐射或内部校准灯表现出线性响应; 响应被量化为8位和/或10位值,表示通常称为数字数字(DN)的亮度值。根据仪器的已知动态范围限制创建重新调整增益和偏差。这些增益和偏差用于将校准的数字转换为传感器的辐射。然后通过对太阳高度和太阳光谱辐照度进行归一化,将该辐射率转换为大气顶(TOA)反射率。表4总结了太阳外大气层光谱辐照度(ESUN)值。为了保持与ETM 的一致性,本文使用光谱辐射单位W /(m2.sr.mu;m)。
请注意,从mW /(cm2.sr.mu;m)单位到W /(m2.sr.mu;m)时,转换因子为1:10。
4通过近似同步表面观测校准
数据连续性要求对由不同成像传感器获取的图像数据的解释保持一致。本节提供了从L7 ETM ,L5 TM和IRS-P6 AWiFS和LISS-III传感器获得的反射率测量结果的比较。使用基于两个传感器近似同时观察到的大公共区域的图像统计进行交叉校准。由于图像采集在几分钟内发生,因此假设表面和大气条件在此期间没有变化。L7,L5和IRS-P6传感器的沿轨道和跨轨道像素采样不同。由于观察几何形状和传感器扫描时间的不同,这些传感器同时观察到的特征将由略微不同数量的图像像素表示。这使得很难建立足够的几何控制以便于逐点和/或检测器逐个检测器的辐射比较。因此,分析方法利用基于图像对之间共同的大的同质区域的图像统计。使用两个图像共有的不同特征仔细选择这些大区域。选择亮区和暗区以获得每个传感器动态范围的最大覆盖范围,但排除了具有云或云阴影的区域。对于每个图像三联体(L5或L7,AWiFS和LISS-III),在这些区域内定义感兴趣区域(ROI)。由于扫描线校正器异常导致的L7数据中的间隙被丢弃。然后通过拒绝任何Landsat频段中标准偏差大于10 DN的任何区域来测试每个ROI的均匀性。这为亚利桑那州梅萨收集了27个投资回报率,为犹他州盐湖城收集了34个投资回报率。图2显示了来自Mesa,AZ测试站点的一对感兴趣区域,左侧是AWiFS数据,右侧是L7 ETM 数据。图3显示了来自盐湖城UT测试站点的一对感兴趣区域,左侧是AWiFS数据,右侧是L5 TM数据。一旦选择了所有区域ROI,就计算图像统计数据以逐个波段地获得平均值和标准偏差目标值。然后将平均目标统计数据转换为绝对辐射单位,然后转换为大气顶(TOA)反射率。然后对每个仪器对绘制这些反射率值,并计算线性拟合,给出每个传感器对之间的相对增益和偏差。
5 L7 ETM 与IRS-P6 AWiFS和LISS-III传感器的交叉校准精度
图4和图5显示了Mesa,AZ集合的交叉校准图,比较了L7 ETM 反射率与AWiFS和LISS-III反射率。对每个频带中的数据进行了最小二乘拟合,并且还绘制了预期的1对1反射率线以供参考。这些反射率测量对的线性拟合给出了交叉校准增益和偏差,如表5所示。
6 通过IRS-P6 AWiFS和LISS-III传感器测量L5 TM的交叉校准精度
图6和图7显示了盐湖城,UT收集的交叉校准图,比较了L5 TM反射率与AWiFS和LISS-III反射率。对每个频带中的数据进行了最小二乘拟合,并且还绘制了预期的1对1反射率线以供参考。这些反射率测量对的线性拟合给出了交叉校准增益和偏差,如表6所示。
7 总结
为了理解IRS-P6 AWiFS和LISS-III传感器的绝对辐射校准精度,将来自这些传感器的图像对与Landsat-5 Thematic Mapper(TM)和Landsat-7增强型专题成像仪(ETM )传感器的图像进行了比较。该方法涉及基于来自两个传感器同时观察的区域的图像统计来校准几乎同时的表面观察。从这些传感器获得的反射率估计值的平均百分比差异在12%之内。
在整个任务中表征两个传感器之间绝对差异的额外工作正在进行中。
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[20812],资料为PDF文档或Word文档,PDF文档可免费转换为Word
您可能感兴趣的文章
- 饮用水微生物群:一个全面的时空研究,以监测巴黎供水系统的水质外文翻译资料
- 步进电机控制和摩擦模型对复杂机械系统精确定位的影响外文翻译资料
- 具有温湿度控制的开式阴极PEM燃料电池性能的提升外文翻译资料
- 警报定时系统对驾驶员行为的影响:调查驾驶员信任的差异以及根据警报定时对警报的响应外文翻译资料
- 门禁系统的零知识认证解决方案外文翻译资料
- 车辆废气及室外环境中悬浮微粒中有机磷的含量—-个案研究外文翻译资料
- ZigBee协议对城市风力涡轮机的无线监控: 支持应用软件和传感器模块外文翻译资料
- ZigBee系统在医疗保健中提供位置信息和传感器数据传输的方案外文翻译资料
- 基于PLC的模糊控制器在污水处理系统中的应用外文翻译资料
- 光伏并联最大功率点跟踪系统独立应用程序外文翻译资料


