
英语原文共 6 页,剩余内容已隐藏,支付完成后下载完整资料
耦合学习的迭代学习控制建筑物的温度和湿度
Matt Minakaislowast; Charles C. Okaemelowast;lowast; Sandipan Mishralowast;lowast;
John T. Wenlowast;lowast;lowast;
lowast; Electrical, Computer and Systems Engineering Department
(minakm@rpi.edu)
lowast;lowast; Mechanical, Aerospace, and Nuclear Engineering Department
(okaemc@rpi.edu, mishrs2@rpi.edu)
lowast;lowast;lowast; Industrial and Systems Engineering Department (wenj@rpi.edu) Rensselaer Polytechnic Institute, Troy, NY 12180 USA
概要:
本文介绍了一种基于无源性的迭代学习控制(ILC)算法,用于建筑物中的温度和湿度耦合。由于建筑物受到重复的昼夜扰动模式影响,因此ILC算法可以显着提高性能。此外,由于它是前馈控制方案,因此它可以与无模型或基于模型的方法(如流行的模型预测控制技术)结合使用。然而,基于模型的控制对于建筑物来说是具有挑战性的,因为难以确定建筑物的温湿度模型。此外,控制法的设计应考虑温度和湿度设定点。我们提出了一种无模型的ILC设计方法,这种方法由建筑热湿动力学固有的被动性所促成。我们首先证明,建筑动态是严格的输出 - 增量被动。然后利用这个性质来设计保证迭代域收敛的ILC定律,同时对模型不确定性具有鲁棒性。由于我们希望仅使用一个输入 - 供应空气的质量流量来控制温度和湿度,因此不能保证收敛到一个点;示出了在温度 - 湿度平面上收敛到椭圆。通过仿真示例演示控制器的性能。
copy;2017,IFAC(国际自动控制联合会)主办Elsevier有限公司保留所有权利。
关键词:温度,湿度,基于无源性的控制,迭代学习控制,楼宇自动化,人体舒适度
1.简介
考虑到建筑物中采暖,通风和空调(HVAC)系统的巨大能量足迹,建筑物的热管理已成为一个受欢迎的研究领域。典型的控制器在实践中往往不太成熟(PID或爆炸),在能源消耗和人体舒适度方面留下了很大的改进空间。这些控制器本身并不包含能量优化,也没有明确考虑可预测的干扰。正因为如此,研究人员已经研究了更先进的建筑物热管理控制策略。
尽管多年来在室内环境控制方面做了大量工作,但以前的大多数研究都是单独解决温度调节问题,在建模能量转移和设计控制架构时忽略湿度(Shaikh等,2014)。尽管如此,温度和相对湿度是主要的两个
这项工作得到了NSF奖CNS-1230687,自动化技术与系统中心(CATS)的部分支持,该项目由纽约州帝国国家发展部科学与技术创新部(NYSTAR)提供,以及Engineering根据合作协议编号EEC-0812056,美国国家科学基金会的研究中心计划(ERC)。
影响人体热舒适的因素(Damle等,2012)。温度和湿度都可以通过便宜的传感器实时测量,并且可以提前很长时间预测它们的环境预测。研究还表明,人类居住者在温湿度平面范围内舒适,因此没有必要为温度和湿度达到特定的设定点。相反,将温度和湿度控制在舒适区域就足够了。在我们以前的工作中已经引入了建筑物中基于舒适区域集合的控制(Okaeme et al。,2016)。
当前建筑热控制的大部分工作采用基于模型的设计,包括模型预测控制(MPC)(Sturzenegger et al。,2016; Borrelli et al。,2012; Oldewurtel et al。,2012)。 MPC非常适合建立热控制,因为未来的干扰可以预测,并且能量优化功能正在建立。然而,这种基于模型的方案需要精确的模型,因此随着模型不确定性的引入,预测控制器的性能可能会显着降低。由于建筑物之间建筑材料和建筑物的巨大差异以及建筑热动态的时变特性,建筑模型难以准确识别。这激发了对模型无关解决方案的搜索。
2405-8963copy;2017,IFAC(国际自动控制联合会)由Elsevier有限公司主办,保留所有权利。国际自动控制联合会负责同行评议。
10.1016 / j.ifacol.2017.08.2290
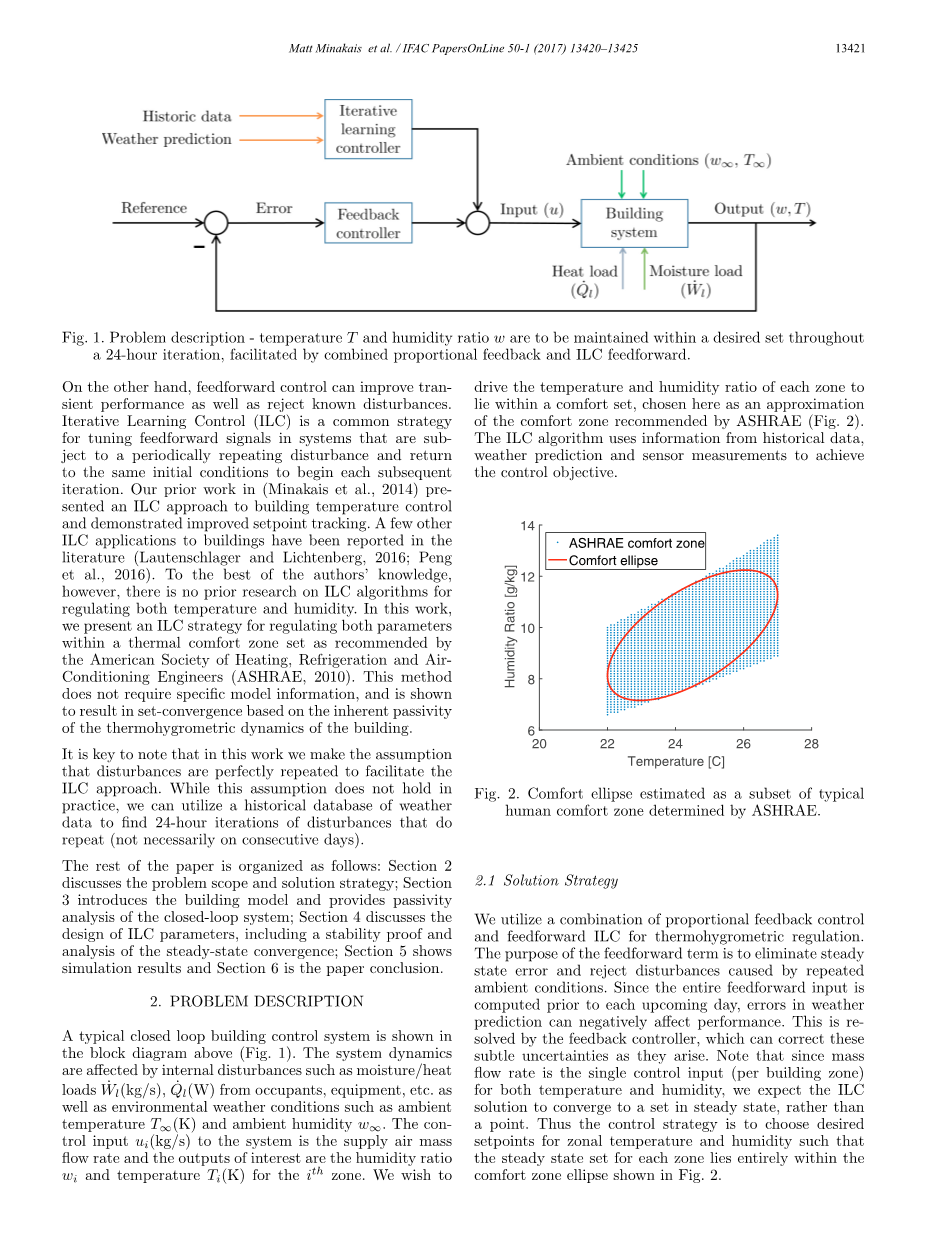
图1.问题描述 - 通过组合的比例反馈和ILC前馈,在整个24小时迭代过程中,温度T和湿度比w将保持在期望的集合内。
另一方面,前馈控制可以改善瞬态性能并抑制已知的干扰。迭代学习控制(ILC)是一种常见的策略,用于调整周期性重复扰动并返回相同初始条件以开始每次后续迭代的系统中的前馈信号。我们之前的工作(Minakais等,2014)提出了一种ILC建筑物温度控制方法,并证明了改进的设定点跟踪。文献报道了一些其他建筑物的ILC应用(Lautenschlager和Lichtenberg,2016; Peng等,2016)。然而,就作者所知,对于调节温度和湿度的ILC算法没有事先研究。在这项工作中,我们提出了一个ILC策略,用于调节美国采暖,制冷和空调工程师协会(ASHRAE,2010)推荐的热舒适区内的两个参数。该方法不需要特定的模型信息,并且显示出基于建筑物的热湿动力学的固有无源性导致集合收敛。
值得注意的是,在这项工作中,我们假设扰动完全重复以促进ILC方法。尽管这种假设在实践中并不成立,但我们可以利用历史数据库中的天气数据来查找24小时重复扰动(不一定连续几天)。
本文的其余部分安排如下:第2节讨论问题范围和解决方案策略;第3节介绍建筑模型并提供闭环系统的无源性分析;第4节讨论了ILC参数的设计,包括稳态证明和稳态收敛分析;第5部分显示了模拟结果,第6部分是文章结论。
2.问题描述
上面的框图显示了一个典型的闭环楼宇控制系统(图1)。 系统动力学受内部干扰的影响,例如来自居住者,设备等的湿度/热负荷W·l(kg / s),Q·l(W)以及环境温度Tinfin;(K )和环境湿度winfin;。 系统的控制输入ui(kg / s)是供气质量流量,感兴趣的输出是第i个区域的湿度比wi和温度Ti(K)。 我们希望驾驶每个区域的温度和湿度比率位于舒适集合内,这里选择ASHRAE推荐的舒适区域的近似值(图2)。 ILC算法使用来自历史数据,天气预报和传感器测量的信息来实现控制目标。
图2.舒适椭圆估计为ASHRAE确定的典型人体舒适区的子集。
2.1解决策略
我们利用比例反馈控制和前馈ILC的组合来进行温湿度调节。 前馈项的目的是消除稳态误差并抑制重复环境条件造成的干扰。 由于整个前馈输入是在每天即将到来的一天之前计算的,天气预报中的错误可能会对性能产生负面影响。 反馈控制器解决了这个问题,它可以纠正这些微妙的不确定因素。 请注意,由于质量流量是温度和湿度的单个控制输入(每个建筑区域),我们预计ILC解决方案会收敛到一个稳定状态的集合,而不是一个点。 因此,控制策略是为区域温度和湿度选择所需的设定点,使得为每个区域设定的稳定状态完全位于图2所示的舒适区域椭圆内。
13422
2.2迭代学习控制
我们现在介绍ILC算法,其目标是迭代更新前馈输入u * k,使得误差ek→0为k→infin;,其中k为ILC迭代次数。粗体符号用于表示向量。请注意,由于控制输入(质量流量)与两种状态都有双线性耦合,误差ek将形成(在第3节中)作为w和T的加权组合。使用标准的ILC更新公式:
(1)
其中条形符号是指整个L2 [0,tau;]轨迹(tau;是一次迭代的周期,比如一天),例如,u *:= {u *(t):tisin;[0,tau; ]}。这里,L:L2→L2和Q:L2→L2是映射L2轨迹的运算符。 L是在e上运行的正定学习规则,Q是用于抑制噪声并为模型不确定性提供鲁棒性的低通滤波器。 ILC输入u *和结果误差e存储在内存中,以供后续迭代使用。我们希望设计一个合适的学习规则L,以保证闭环稳定性。要做到这一点,我们可以利用建筑系统中固有的被动性来建立L.的大小的保守范围。
3.无效分析
在本节中,我们将展示系统的无源性如何使我们能够设计前馈控制器以确保闭环稳定性。 我们从介绍系统动力学模型开始,然后展示闭环系统的无源性。
3.1系统模型
考虑以下基于图形的集总参数模型,如我们以前的工作(Okaeme et al。,2016)所示,具有合理的保真度:
Mxx˙ = minus;Lxx Binfin;xinfin; F(x)u
Mx
Binfin; = Bmomo Beo T infin;
其中M(kg)和C(J / K)是对角线,由区域水分和热容量G(kg / s)和K(W / K)组成的正定矩阵是对角线,正质矩阵由质量和跨连接区域的热导。 Bm0(kg / s),Be0(W / K)是具有非零元素的列矢量,作为连接到环境的区域的质量和热导率。 beta;(J / kg)是水的蒸发焓。 w和T是堆积的纬度湿度比和温度。 ws和Ts是供气湿度比和温度。 ws,Ts是Rn向量中叠加的供给值,u是叠加的ui,D:Rn→Rntimes;n将向量转换为对角矩阵。 cp是空气的比热。 L和D分别是水分和热交换的发生矩阵,其值由图结构确定:
j isin; L H
{Lij, Dij} =
L H L H 0 0
其中 i , i ( minus;i , iminus;) 表示节点i为正(负)端的链路集。该模型将在下一节中用于显示闭环系统的无源性。
3.2严格的输出增量无源性
对于这种分析,我们认为delta;y= FT(x)Exdelta;x作为输出,其中delta;x= x * -x和x *是所需的稳态。 这里,Ex被定义为
Ex
alpha;是用于相对称量湿度和温度输出的比例因子。
权利要求1.给出从(2)的输入u和状态x的系统,闭环系统从delta;u到delta;y严格被动。
证明:关于期望的稳态x *的误差动态可写为
Mxdelta;x˙ = minus;Lxdelta;x F(xlowast;)ulowast; minus;F(x)u
定义一个正定的能量储存函数:
V (delta;x) = delta;xTExMxdelta;x.
将ExLx LTxEx 的最小特征值表示为gamma;x,并令gamma;u= min(alpha;,cp)mini(u * i),其中u * i是u *的第i个元素。随着阿尔法满足约束:
(6)
其中sigma;min表示最小奇异值,kappa;表示条件编号,因此
xTExFxdelta;u.(7)
用上面定义的delta;y,(7)变成
(8)
因此,从delta;u到delta;y系统是严格被动的(delta;u to delta;yKhalil and Grizzle,1996)。
请注意,严格的被动性意味着严格的输出增量无源性(SOIP),因为严格的被动性是更强的条件。但是,我们仍然希望找到一个合适的gamma;(来自下面的SOIP定义),以用于ILC设计。
定义:如果对于任意两个输入u1,u2,存在gamma;gt; 0,那么系统G被认为是严格输出增量被动:
索赔2.在给出的输入
u =-Kpdelta;y u *(10)其中Kp是对称正定矩阵,闭环系统是从u *到delta;y的SOIP。证明:将(10)代入(8),我们有:
整合双方,就是这样
(12)
其中gamma;Kgt; 0是Kp的最小特征值。因此,系统是严格产出增量被动的(Quintanilla和Wen,2008),从u *到delta;y,gamma;=gamma;K。
lt;
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[21287],资料为PDF文档或Word文档,PDF文档可免费转换为Word
您可能感兴趣的文章
- 饮用水微生物群:一个全面的时空研究,以监测巴黎供水系统的水质外文翻译资料
- 步进电机控制和摩擦模型对复杂机械系统精确定位的影响外文翻译资料
- 具有温湿度控制的开式阴极PEM燃料电池性能的提升外文翻译资料
- 警报定时系统对驾驶员行为的影响:调查驾驶员信任的差异以及根据警报定时对警报的响应外文翻译资料
- 门禁系统的零知识认证解决方案外文翻译资料
- 车辆废气及室外环境中悬浮微粒中有机磷的含量—-个案研究外文翻译资料
- ZigBee协议对城市风力涡轮机的无线监控: 支持应用软件和传感器模块外文翻译资料
- ZigBee系统在医疗保健中提供位置信息和传感器数据传输的方案外文翻译资料
- 基于PLC的模糊控制器在污水处理系统中的应用外文翻译资料
- 光伏并联最大功率点跟踪系统独立应用程序外文翻译资料


