英语原文共 15 页,剩余内容已隐藏,支付完成后下载完整资料
摘 要
现存基于过渡区域图像阈值的方法是不稳定的,对于在目标和背景之间灰度级重叠的图像,未能达到满意的分割精度。这是因为他们只利用过渡区域像素的灰度均值作为整幅图像的分割阈值。为了解决这个问题,我们提出了一种稳健的、通过利用突出过渡区的混合型单目标图像分割方法。具体地说,该方法首先使用局部复杂性和局部方差来确定图像的过渡区,第二,最大像素数量的过渡区域选为显著过渡区。第三,灰度区间是由使用过渡区域和图像信息决定的,一个灰度级区间通过使用显著过渡区被确定为分割阈值。最后,图像阈值精细化是通过显著过渡区去除假对象区域作为最终分割结果。该方法已经通过170幅单对象现实世界图像的实验得到了广泛的评估。实验结果表明,该方法分割准确性和鲁棒性优于其他几种类型的图像分割技术,并且性质简单、效率高。
1 简介
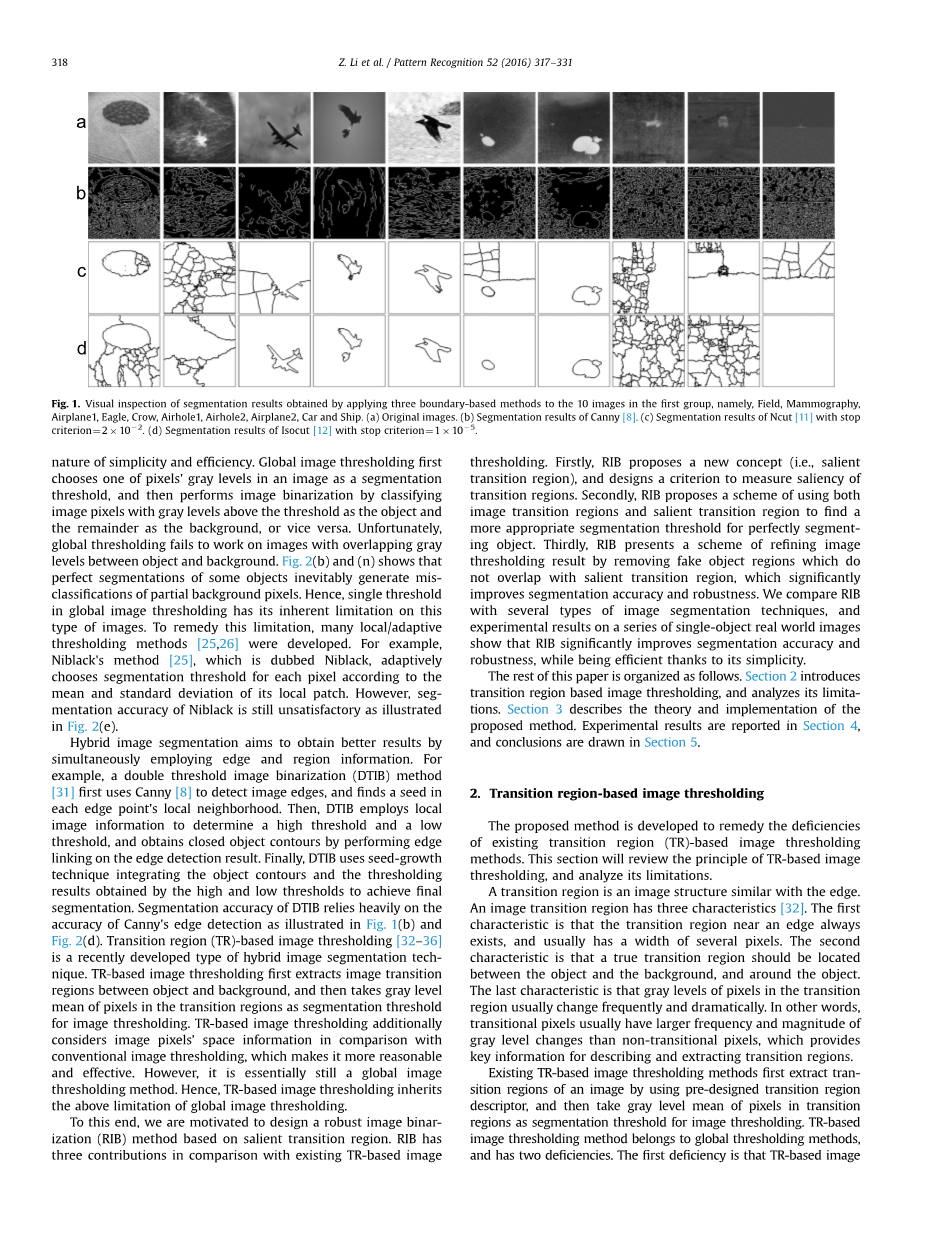
图像分割是图像分析和理解的重要预处理步骤,它旨在通过使用图像特征灰度、颜色、纹理和位置从图像中提取对象。图像分割应用广泛,如生物医学图像分析、字符识别和目标识别。通常,图像分割方法分为三类,基于边界的方法、基于区域的方法和混合方法。基于边界的图像分割采用急剧变化的局部图像特征找到过渡图像结构。例如,从背景中分离对象边缘,基于这种类型的技术,边缘检测和图切割是两种代表性的方法。有一些经典的边缘检测器如canny算子,prewitt算子,Sobel和roberts算子。Canny算子是应用最广泛的边缘检测器。然而,Canny算子常常有边缘不连续和不理想的目标或者不理想的背景细节的缺点。近年来基于图切割的方法来吸引了越来越多的关注。它们把图像作为一个图形,并将图像分割问题作为一个迭代图划分问题。标准化切割和等周切割是两种广泛使用的方法,标准化切割对具有高对比度的简单图像才能得到良好的分割结果。综上所述,等周切割通常获得高于标准化分割的精度。然而,等周切割在低对比度仍然不能得到令人满意的分割精度图像。
基于区域的图像分割定义图像区域的均匀性,并采用目标区域和背景区域之间的均匀性差进行分割。这类技术包括区域增长,区域分割和合并、聚类、阈值分割等。其中,全局图像阈值由于简单和高效率的性质被广泛使用。全局图像阈值首先选择一个像素的灰度级别作为图像的分割阈值,然后进行图像二值化,分类的图像像素灰度级在阈值以上的作为对象,其余为背景,反之亦然。然而全局阈值不能处理对象和背景之间的灰度级重叠的图像。理想的分割对象生成错误分类的部分背景像素是不可避免的。因此,单一阈值对这种类型的图像有其固有的限制。为了解决这个限制,许多局部和自适应阈值的方法得到了发展。例如,Niblack方法根据局部平均值和标准差为每个像素自适应地选择分割阈值,然而Niblack的分割精度仍不令人满意。
混合型图像分割的目的是通过同时采用边缘与区域信息以获得更好的效果。例如,双阈值图像二值化(DTIB)方法,首次使用canny检测图像的边缘,并在每个边缘点的局部邻域找到种子。然后,DTIB采用局部图像信息以确定高低阈值,并通过在边缘检测结果执行边缘连接获得封闭对象的轮廓。最后DTIB使用种子生长法整合对象轮廓和由高低阈值实现最终分割的阈值的结果。DTIB的分割精度在很大程度上依赖于Canny算子的边缘检测的准确性。基于过渡区(TR)的图像阈值分割技术是近年来发展起来的一种混合图像分割技术。基于TR图像阈值化首先提取图像目标与背景之间的过渡区域,然后以像素的灰度均值在过渡区域作为图像分割的阈值。基于TR图像阈值分割,另外考虑图像像素的空间信息与传统的图像阈值的比较,这使其更加合理和有效的。然而它本质上仍然是一个全局阈值的方法。因此基于TR图像阈值分割也具有以上全局图像阈值的限制。
为此,我们基于显著过渡区设计了一种鲁棒的图像二进制化(RIB)方法。RIB与现有的基于TR图像阈值比较有三大贡献。首先,RIB提出了一个新的概念(即显著过渡区域),并设计了一个标准来衡量的显著过渡区域。其次,RIB提出了使用过渡区域一种改进的图像阈值和显著过渡区域寻找更恰当的分割阈值的方案。第三,RIB提出一种改进的图像阈值方法,通过去除假目标区域不重叠的显著的过度区域,这极大地提高了分割精度和鲁棒性。我们比较RIB与多种类型的图像分割技术,并对图像进行了实验,实验结果表明,RIB显著提高分割准确度和鲁棒性,这得益于它的简单性。
本文的其余部分安排如下。第2节介绍基于过渡区的图像阈值化,并分析了其局限性,第3节介绍了该方法的理论和实现,实验结果列于第4节,结论在第5节。
2 基于过渡区的图像阈值化
该方法是弥补现有的显著过渡区(TR)的图像阈值的方法。本节将回顾基于TR-图像阈值的原理,并分析其局限性。
过渡区域是与边缘类似的图像结构。图像过渡区有三个特点,第一个特点是邻近的边缘的过渡区总是存在,并且通常有若干个像素的宽度;第二个特征是一个真实的过渡区域应位于对象和背景以及周围的对象之间;最后一个特征是,在过渡区域的像素的灰度级通常频繁并显着的变化。换言之,过渡像素通常比非过渡像素具有较大的灰度变化的频率和幅度,这提供了描述和提取过渡区域的关键信息。
现有的基于TR阈值方法首先提取通过使用预先设计的过渡区域提取图像的过渡区域描述符,然后以过渡区域的像素灰度均值作为图像分割的阈值。TR图像阈值方法属于全局阈值的方法,它有两个缺陷。第一个不足是TR图像阈值方法不能在灰度级重叠图像的对象和背景之间达到满意的分割精度,这是由于在图像的阈值中使用单个阈值所造成的,对象和背景之间的灰度级重叠可能由不均匀的照明或图像本身所引起的。不可避免地,不能处理灰度级重叠部分。缺点二是基于TR-图像阈值法是不稳定的。正如上面指出的,更精确的过渡区域应产生更好的分割的结果。但是,通过LGLD和LE得到的精确过渡区域与MLE分割结果相比效果更差。其根本原因是基于TR图像阈值法只是将像素的灰度级过渡区作为一个全局阈值的阈值,并且不充分利用过渡区。
3 提出的方法
为了弥补基于TR图像阈值法的不足,提出了一种基于显著过渡区域的单目标图像分割方法。该方法从一个独特的角度利用图像转换区域。它显着提高了分割精度和鲁棒性,并具有简单性和效率的性质。接下来的章节将描述所提出的方法的理论和实施方法。
3.1 过渡区提取
过渡区提取旨在找到过渡区附近的一个真正的对象轮廓。过渡像素通常比非过渡像素有更加频繁和密集的灰度变化。根据这一线索,近年来已研制出许多描述符来描述和提取过渡区域。例如,局部熵(LE)方法提取过渡区域通过测量灰度变化的频率。局部灰度差异(LGLD)方法测量灰度变化的大小。修改局部熵(MLE)方法通过整合局部复杂度与局部方差同时测量频率和灰度级变化。局部复杂度与局部熵相比,在灰度变化的频率上具有相似的效果和更简单的形式。局部方差,这是一种常见的统计测量反映平均值和个体之间的偏差的大小,用于测量的在过渡区域的描述和提取灰度级的变化的幅度。
不失一般性,对于一个给定的像素p(i,j)和一个mtimes;xtimes;m局部领域Omega;,它的局部复杂性被定义为:
(1)
(2)
(x,y)表示在局部领域Omega;中的局部坐标,整幅图像的灰度区间[0 L-1]。P(i,j)的局部方差被定义为:
(3)
(x,y)仍然表示在局部领域Omega;中的局部坐标,f(x,y)表示P(x,y)的灰度,表示Omega;灰度均值。
当Omega;在图像内一个像素接着一个像素从左到右,从上到下,每个像素局部复杂性和局部方差都可以被计算。需要注意的是,为了将Omega;适用到整个图像,每个图像的四个边界由足够的像素通过镜像延长。图像中各像素点的局部复杂度和局部方差的合成图像矩阵:
(4)
(5)
和表示图像的高度和宽度,以防止由于在以下方式其中之一导致它们的值之间大的差异被忽视,分别对这两个图像矩阵归一化:
(6)
(7)
最后,归一化的局部复杂度和归一化局部方差的合成作为过渡区域描述符。NLCV公式:
(8)
1和0之间的权重是用来平衡归一化局部复杂度和归一化局部方差贡献的。当W=1,NLCV退化为局部复杂度。相反,当W=0,NLCV退化为局部方差。所有像素的NLCV值构造成一个过渡区描述矩阵NLCV。
基于矩阵NLCV,图像过渡区可以通过以下步骤来提取:
1.NLCV转换成矢量SNLCV,并以降序排序的SNLCV所有元素。
2.选择对应于在SNLCV的第一个alpha;元素作为过渡像素和n像素构成过渡区域,其中alpha;是一个参数,n表示图像中的总像素数。按降序排列SNLCV的所有元素。过渡区提取的原理是由于局部领域频繁和密集的灰度变化,过渡像素应该有比非过渡像素更大的局部复杂度和局部方差。为表示过渡像素,我们定义一个标签矩阵TR:
(9)
3.2.显著性过渡区提取
显著过渡区提取的目标是从可能含有假的过渡区域内的对象或背景的所有过渡区中选择一种真实的和具有代表性的(即显著的)过渡区。所提取的显著过渡区域将被用来搜索一个适当的分割阈值的图像阈值。因此显著过渡区域应该是一个对象和背景之间真正的过渡区域。换句话说,显著过渡区域应包括部分对象像素和部分背景像素。显著过渡区域的像素的灰度值可以帮助我们寻找最佳分割阈值来区分目标和背景。因此,对于过渡区域提取最重要的原则是确保提取的显著位置区是在真的过渡区域的对象和背景之间的。其次,一个更多像素的显著过渡区域可提供更多的灰度信息,以确定最佳的分割阈值。根据这两个规则,一个简单的和有效性的措施是用来量化的过渡区域的显著性。显著过渡区提取的过程如下:
(1)纠正位于任何四个图像边界的过渡区域。即,对应于这些区域的过渡区域的标签矩阵TR的元素被设置为零。这个修正的目的是消除由一些因素,如图像边缘的不均匀光照,形成的不合适过渡区域,并阻止他们被选为显著的过渡区。正如我们所知,图像对象通常不位于图像的边界,周围对象的显著过渡区域通常不位于图像的边界。即使对象是出现在图像边界,和位于图像的边界且具有最大的像素数量的真正过渡区,不会被选为显著过渡区,这是由于它们在上述过渡区纠正过程中被去除。我们可以选择的过渡区域的第二大的像素数作为显著过渡区域。所选择的显著过渡区域通常也是一个真正的过渡区域。显著过渡区的选择对后续步骤的影响不大,这是因为显著过渡区域不一定环绕整个对象。
(2)使用不同的数字标记所有的过渡区,通过MATLAB函数“bwlabel”,其中每个连接过渡区的该函数值有一个独特的标签数。
(3)计算每个连接的过渡区内的像素数。
(4)采取过渡区最大的像素数量的显著过渡区。如果有两个或两个以上的过渡区域具有相同的最大像素值,只有其中的一个被选为显著过渡区。在这里,该方法采用一个最简单的方案,以提取显著过渡区域,即,它选择的过渡区域的最小标号数作为显著过渡区,为表示显著过渡区域,我们定义一个标签矩阵STR:
(10)
事实上,有两个或两个以上的过渡区域具有相同最大像素数量的概率非常低。为了验证这个假设,我们专门记录实验中每张被使用过的图像具有最大像素值的过渡区域的数量。实验结果表明,只有一个图像在第二组有两个过渡区具有相同的最大像素数,其他图像只有一个过渡区有最大像素数。特殊样品图像包含三个暗边界由红色箭头,这使得那些边界像素都由于它们和它们相邻的背景像素之间有较大的灰度差异。这些边界像素是图亮像素。
每个彩色图像通过施加Matlab中的imagesc函数得到三种重要图像矩阵,其中0,255和128分别表示物体的像素值,背景象素值和显着的过渡区域的像素值。这两个显着的过渡区域组成的部分对象像素和局部背景象素,二者都为真过渡区域。两个显著过渡区分别找到类似的分段阈值(即T*=156和T*=157),并获得类似的最终分割的结果(即:ME=0.0065582和ME=0.0065155),其中ME(误分)的公式定义(23)。总之,当存在两个或多个过渡区域具有相同的最大像素数,从中选择任一个作为显著过渡区域他们对最终的分割结果影响不大。在这种情况下,提出采用一个简单的方案来提取显著过渡区域,即通过选择它们之间具有最小标记号的过渡区域为显著过渡区域。
3.3图像阈值
这个步骤首先寻找比在过渡区域中灰度级像素均值更适当的分割阈值方式,然后由图像阈值求出初始分割结果。在本节中,提出一个新颖的方案以确定分割的阈值。该方案首先使用的全局图像信息和过渡区域找到一个灰度级间隔为候选的阈值区间,然后采用显著过渡区域,选择的时间间隔为图像阈值分割的阈值的一个灰度级。
在候选的阈值区间的研究中要考虑两方面。一方面,灰度图像对象可以被识别,因为它的灰度级及其周围背景不同。另一方面,过渡区具有比非过渡区域更频繁和密集的灰度水平的变化,这使得过渡区域更吸引人类视觉感知,并有助于人眼从背景中区别物体。真实过渡区域应位于物体和背景之间。换句话说,真实过渡区域应由部分对象像素和局部背景像素组成。因此,最佳的分割阈值应该与真正的过渡区域有一个牢固的关系,这线索建议我们从灰度区间周围像素的灰度均值的过渡区域寻找最优分割阈值,因为大多数过渡区是正确的过渡区,虽然有可能是假的过渡区域内的对象或背景。
灰度区间(即候选阈值间隔)是由以下步骤确定。
(1)计算过渡区内所有像素的灰度级平均值,通过以下公式,
(11)
(2)计算两个灰度级,T1和T
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[152091],资料为PDF文档或Word文档,PDF文档可免费转换为Word
您可能感兴趣的文章
- 饮用水微生物群:一个全面的时空研究,以监测巴黎供水系统的水质外文翻译资料
- 步进电机控制和摩擦模型对复杂机械系统精确定位的影响外文翻译资料
- 具有温湿度控制的开式阴极PEM燃料电池性能的提升外文翻译资料
- 警报定时系统对驾驶员行为的影响:调查驾驶员信任的差异以及根据警报定时对警报的响应外文翻译资料
- 门禁系统的零知识认证解决方案外文翻译资料
- 车辆废气及室外环境中悬浮微粒中有机磷的含量—-个案研究外文翻译资料
- ZigBee协议对城市风力涡轮机的无线监控: 支持应用软件和传感器模块外文翻译资料
- ZigBee系统在医疗保健中提供位置信息和传感器数据传输的方案外文翻译资料
- 基于PLC的模糊控制器在污水处理系统中的应用外文翻译资料
- 光伏并联最大功率点跟踪系统独立应用程序外文翻译资料


