英语原文共 30 页,剩余内容已隐藏,支付完成后下载完整资料
加速度传感器与导航系统的偏移检测
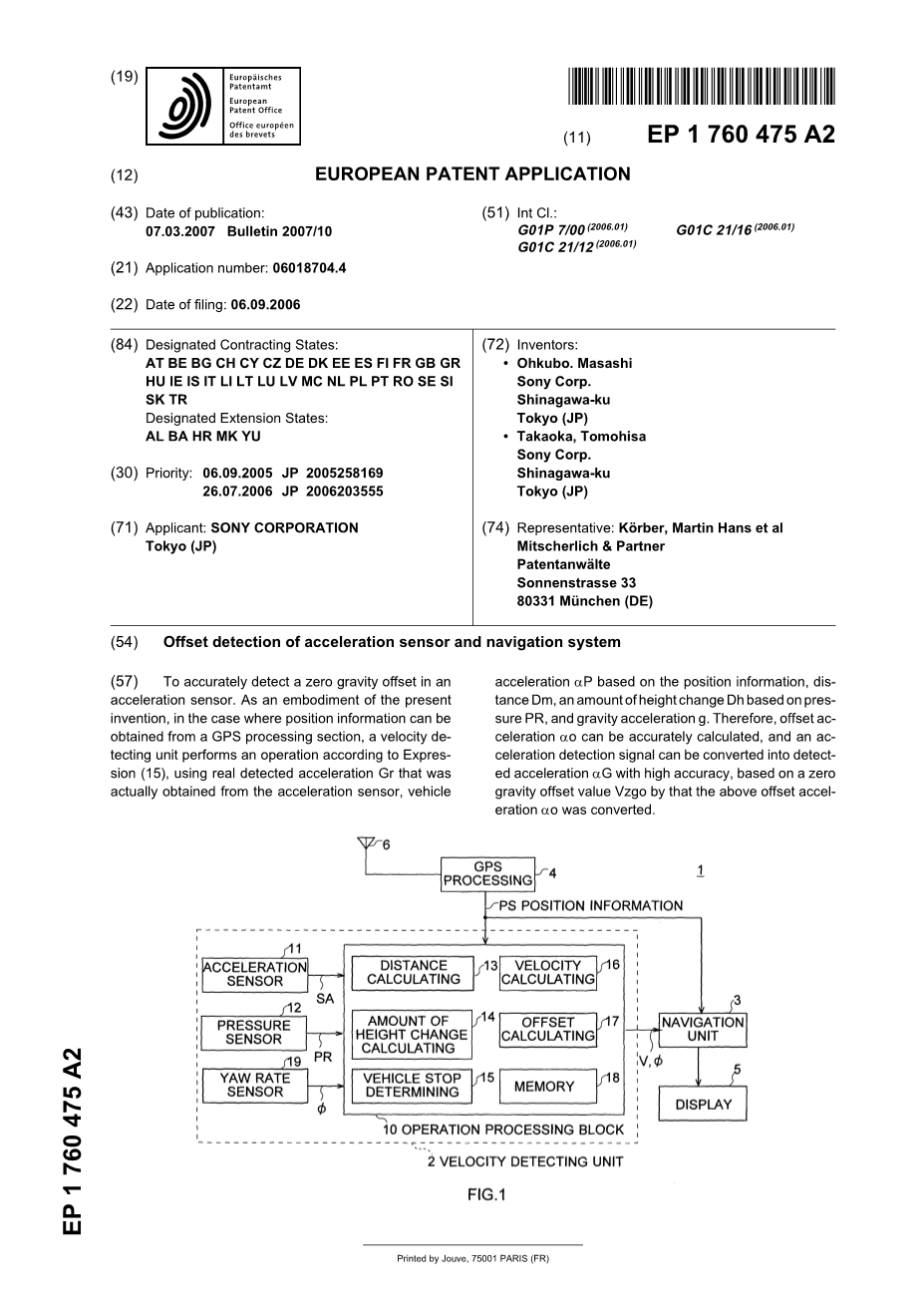
要准确地检测加速度传感器的一个零重力偏移。作为本发明的一个具体化例子,在这个位置信息可以从一个全球定位系统处理部分获得的情况下,速度检测单元根据表达式执行操作,使用实时检测加速度的GR,实际上是从加速度传感器获得的,车辆加速度P基于位置信息,距离Dm,高度变化量Dh基于压力PR和重力加速度,因此,可以准确地计算偏移加速度,并且可以将加速度检测信号转换成高精度的加速度信号G,基于一个零重力偏移值vzgo,通过上述偏移加速度o转换。
描述
相关应用交叉参考
001本发明包含日本专利申请jp2005-258169, 2006-203555的相关题材,并分别于2005年9月6日和2006年7月26日向日本专利局提出申请。全部内容被纳入到本文参考
发明背景和发明领域
002本发明涉及一种加速度传感器的偏移检测系统、加速度传感器的偏移检测方法和加速度传感器的偏移检测程序和导航系统,例如,适用于安装在车辆上的导航系统.
有关的ART描述
003迄今为止,导航系统将安装在一个移动的移动体或者像计算出的目前位置是基于GPS信号从全球定位系统(GPS)上进行卫星传输,并且,一个移动体显示在地图频幕上的位置和方向已经被广泛推广
004在这样的导航系统中,一个移动体的速度和前进方向通过一个加速度传感器来探测移动体前进方向的加速度,一个陀螺仪传感器(偏航速率传感器)用于检测上述移动体在水平方向上的旋转角速度来计算。因此,移动体的目前的位置可以被估计,即使在一个不能被接收到全球定位系统信号的情况下,例如在一个建筑物的阴影处和在隧道中。
005然而,该加速度传感器具有当所谓的零重力偏移的变化,受周围温度的影响,由导航系统本身产生的热量,或类似的,由于它的温度特性。输出电压没有检测到加速度的一个问题。
006然后,一些导航系统中的高度变化(高度差)的计算使用当车辆在斜坡上行驶时,由加速度传感器检测到的重力加速度的正向分量被包含在一个被检测到的值中,计算出一个零重力偏移(加速度误差)是通过比较所计算出的高度变化和已知的基于存储在地图信息的高度数据中的高度变化已经被提出(见日本专利公开号2004-233306,例如)。
发明概要
007然而,在具有上述配置的导航系统中,有一个问题是,当一个正确的高度变化量是未知的,例如,当车辆运行在一个地方,其高度数据不包括在地图信息中,零重力偏移就不能计算。
008鉴于上述情况,它是可取的,以提供一个加速度传感器的偏移检测系统,可以准确地检测加速度传感器的一零个重力偏移,一个加速度传感器的偏移检测方法,和一个加速度传感器的偏移检测程序,和一个导航系统,可以准确显示一个移动体的位置信息。
009根据本发明的一个具体化实例,在加速度传感器的偏移检测系统中,加速度传感器的偏移检测方法,以及加速度传感器的偏移检测程序,实际检测到的加速度对应的偏移量方差的结果被添加到一个预先确定的移动体的前进方向上是通过加速度传感器获得的。检测加速度应该是主要准确的检测是由加速度传感器计算的,并利用加速度传感器的特性,根据实际检测到的加速度和加速度之间的差异,计算出加速度传感器检测到的真实加速度变化的偏移量。
010因此,可以计算偏移量的方差,只有根据实际检测到的加速度和加速度之间的差异,和准确的加速度,准确的加速度在上述偏移量的差异反映可以获得。
011此外,根据本发明的导航系统的实施例,本发明的位置计算部分用于接收来自预定卫星定位系统的定位信号,并计算预先确定的移动体的目前位置,该加速度传感器用于获得对应于该偏移量方差的结果的实际加速度传感器,该加速度传感器被添加到预先确定的移动主体的向前方向上的加速度,加速度检测计算部分,应该主要由检测到的准确的加速度传感器来计算检测到的加速度,补偿计算部分由通过加速度传感器的特性检测的实际加速度的变化的偏移量的方差,根据实际检测到的加速度和加速度之间的差异,信息显示部分利用偏移量方差计算计算加速度的计算方法,并利用上述加速度计算移动体的速度来显示移动体位置的信息。
012因此,仅仅根据实际检测到的加速度和加速度之间的差异,和上述偏移量变化的反应中,可以通过获得精确的加速度显示来获得移动体准确的位置信息,可以计算偏移量的方差。
013当与所附图纸结合在一起时,所附的图纸如参考数字或字符,本发明的性质、原理和实用程序将从以下详细描述中变得更为明显。
详细描述的优选实施例
015本发明的优选实施例将与所附图纸参考被描述。
- 导航系统配置
016参照图1,导航系统1是安装在作为移动体的车辆100(图2a)上的,这个车辆100的目前位置是由一个全球定位系统(全球定位系统)处理部分4计算得来的,根据从GPS卫星接收到的GPS信号,车辆100的当前位置是由屏幕显示数据的叠加的标志显示或者在预定的地图数据的导航单元3生成,然后发送到一个显示屏幕5和一个显示屏幕上显示,由此,用户可以看到车辆100在地图上的位置。
017全球定位系统处理部分4通过全球定位系统的卫星信号6接收来自多个全球定位系统卫星(未经显示),通过执行基于全球定位系统信号的预定位置计算处理所产生的位置信息,并将此操作处理块10中的速度检测单元2和导航单元3。
018速度检测单元2是围绕操作处理块10形成的。加速度传感器11用于检测车辆100在前进方向上的加速度,压力传感器12用于检测周围的压力,和一个横摆率传感器19连接到上述操作处理块10用于检测车辆100在垂直方向上的旋转角速度。
019加速度传感器11产生一个加速度检测信号SA,该信号在一个范围内从0伏到5伏变化,对应于车辆100在前进方向上的加速度,并提供此操作处理块10。在这方面,加速度传感器11设置,当所有加速度不工作在车辆100在前进的方向时,加速度检测信号SA成为2.5 V的电位(以下的加速度检测信号SA此时潜在的被称为一零重力偏移值vzgo)。
020压力传感器12产生一个压力检测信号SR,在预定范围内对应于周围压力的潜在变化,并将此提供给操作处理块10。
021偏航率传感器19检测车辆的垂直方向角速度(即,在横摆旋转轴旋转),并提供此给操作处理块10。
022操作处理块10将加速度检测信号SA在一个转换的基础上,从加速度传感器11转换为在车辆100的正向方向上检测到的加速度G,参考电位控制相同的零重力偏移值vzgo(即2.5 V),和压力检测信号SR从压力传感器12到压力值PR的关系,代表了周围的压力。然后,操作处理模块10根据处理单元4的GPS所提供的车辆100的位置信息PS,和上述检测到的加速度G和压力PR的关系,计算出速度并发送到导航单元3.
023操作处理块10有一个中央处理单元(中央处理器)配置未显示,并读取各种应用程序,如速度计算程序或类似于从只读存储器(只读存储器)不显示和执行它。因此,处理功能,如用于计算车辆100在预定测量时间内的移动距离的距离计算部13,一个计算高度变化的部分14,用于计算车辆100在上述测量时间的基础压力PR的高度变化量(稍后将详细说明细节)。车辆停止确定部分100确定车辆是否停止或正在运行,一个速度计算部分16用于计算车辆100的速度(稍后将详细说明细节)和一个偏移量的计算部分17计算一零重力偏移ZGO是包含在通过加速度传感器11检测其加速度G是分别实现的。
024此外,操作处理模块10存储计算的速度v和零重力抵消ZGO,或者类似于一个非易失性存储器的存储部分18,或者如果必要读取他们。
025在这个连接中,导航系统1不使用在车辆100中产生的脉冲形式的车辆速度脉冲信号,并且在该周期变化对应于上述车辆100的速度。由此,在上述车辆100上安装上述导航系统1时可简化布线处理。
026在这种方式下,导航系统1的速度检测单元2计算车辆100的速度V,并计算一零重力偏移ZGO是包括在加速度传感器11提供的检测加速度G。
- 本发明的基本原理
027本发明的基本原理将被描述,在这里,如图2A所示,假定车辆100是在水平面HZ具有坡度Q的斜坡SL上运行。在这种情况下,加速度传感器11(图1)检测到的加速度G,在前进方向重力加速度作用下(以下简称为重力加速度分量gf)增加了由车辆100移动造成的主要加速度对应的值(以下简称为车辆加速度P)。也就是说,重力加速度分量gf可以通过检测到的加速度G和车辆加速度P之间的差异通过以下表达式计算得到:
028导航系统1 中的速度监测单元2 可以根据多个小时的位置信息PS计算出车辆加速度P和距离和速度。
029另外,如图2B和2C所示,一个距离比Dm是车辆100在一个斜坡上在一个测量时间mt中从测量的起点位置的准确时间t0到测量的终点位置的准确时间t1(比如1-2度)的高度变化Dh比上述车辆100的测量时间mt等于重力加速度分量gf和重力加速度g的比值。因此,以下表达式的关系是满意的:
030顺便说一下,上述距离Dm可以用车辆100在时间t0的速度v0和车辆加速度P表示,按照使用速度和加速度的距离的一般表达式,如下面的表达:
在这里,如果通过替换表达式(1)和(3)表达表达式(2),它涉及到以下表达式:
- 速度计算
031通过这种方式,如果在有阴影的建筑中或在隧道中,无法接收到天线6 中的全球定位系统的全球定位系统信号,或者类似的,导航单元3不能通过GPS处理部分4的位置信息PS获取车辆100的当前位置,因此,导航系统1的速度监测单元2(图1)根据车辆100在水平方向上的速度v和角速度f估计出当前的位置,并基于此在显示单元5中显示地图屏幕。
032然而,由于天线6的GPS不能接收GPS信号,导航系统1(图1)的速度检测单元2不能使用一个简单的技术基于时间变化从GPS处理单元4获取位置信息来计算速度v。
033然后,速度计算单元16用速度监测单元2,在不使用位置信息PS的情况下,基于在时间t0的速度v0计算在时间t1的速度v1。(稍后将详细说明细节)
034首先,如果改变关于车辆加速AP的上述的表达(4),得到以下表达式:
在这里,在时间T1的速度V1,按照一般的物理表达的速度v.下列表达式的关系是满意的
这意味着速度V1可以基于速度V0计算。在这里,通过表达(5)代入表达(6),可以得到以下表达式:
035可以得到一个高度变化量Dh,速度监测单元2 可以通过使用检测加速度G,测量时间mt,在时间t0的速度v0,重力加速度g和高度变化量Dh计算得到在时间t1的速度v1。
036在这种情况下,速度检测单元2直接执行表达式(7)的运算。然而,上述表达式(7)是由表达式(5)替换表达式(6)表示的,因此,这意味着速度监测单元2通过此简洁获得车辆加速度和通过从t0时间的速度v0获得t1时间的v1。
- 车辆停止状态的测定
037顺便说一下,如图所示的表达(6)、速度检测单元2通过速度v0在时间t0(即前即刻速度v0)计算速度V1在时间T1(即现在的速度V1)。因此,如果速度v是错误的,那么速度V1也是一个错误的值。因此,车辆检测单元2确认检测的车辆100的第一个速度v是正确的,即在车辆的停止状态速度v为0.
038在这里,一般情况下,当车辆100正在运行时,根据道路和交通状况速度v会不断变化,因此,上述速度v是连续的一个恒定的值的可能性是非常低的,上述速度的值在一定程度上具有一定的差异性。另一方面,当车辆100停止时,速度v不从0改变并且是一个恒定的值。因此,即使考虑到检测误差,速度v的变化在一个预定范围内。
039然后,速度检测单元2通过车辆停止确认部分15计算在预定时间范围内(例如,五秒)速度v的方差Vvar,如果方差Vvar在预定范围内,速度监测单元2确认车辆100停止,速度v在这个时候修正为0.
040因此,速度检测单元2能正确判断车辆100是否处于运行状态或停止状态。当车辆100处于停止状态时,速度v纠正为零,所以,该速度后,可以正确计算。
- 速度输出处理
069下一步,速度检测单元2的速度输出处理程序计算的车辆100的速度和输出它的导航单元3将被描述为参照图4图。
070如果导航系统1电源开启,速度检测单元2的运算处理块10启动速度输出处理程序RT1并进入步骤SP1。在步骤SP1,运算处理块10通过车辆停止确认部分15计算过去15秒速度v的方差Vvar,确认车辆是否处于停止状态,并继续下一步的SP2。
071在SP2操作步骤,操作处理模块10通过车辆停止确认部分15计算在步骤1中的速度v的方差Vvar是否在阈值内或更少,如果是一个肯定的结果,这意味着方差vvar比较小,车辆100处于停止状态的可能性是非常高的。在这个时候,运算处理模块10进行下一步SP3.
072在步骤SP3,运算处理块10校正速度v0之前存储在存储器18部分为零,并进入下一步SP4。
073另一方面,如果步骤SP2获得的是一个负面的结果,这意味着,由于速度v的方差vvar在一定程度大,车辆100处于运行状态的可能性很高。在这个时候,运算处理块10进行下一步SP4,不专门校正之前的速度V0。
074在步骤SP4,运算处理块10确认位置信息PS是否是从GPS处理模块4获得的,如果得到一个肯定的结果,这意味着车辆的速度可以在全球定位系统处理部4计算出的位置信息的基础上计算。在这个时候,运算处理块10进行下一个子程序srt1。
075在
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[154209],资料为PDF文档或Word文档,PDF文档可免费转换为Word
您可能感兴趣的文章
- 饮用水微生物群:一个全面的时空研究,以监测巴黎供水系统的水质外文翻译资料
- 步进电机控制和摩擦模型对复杂机械系统精确定位的影响外文翻译资料
- 具有温湿度控制的开式阴极PEM燃料电池性能的提升外文翻译资料
- 警报定时系统对驾驶员行为的影响:调查驾驶员信任的差异以及根据警报定时对警报的响应外文翻译资料
- 门禁系统的零知识认证解决方案外文翻译资料
- 车辆废气及室外环境中悬浮微粒中有机磷的含量—-个案研究外文翻译资料
- ZigBee协议对城市风力涡轮机的无线监控: 支持应用软件和传感器模块外文翻译资料
- ZigBee系统在医疗保健中提供位置信息和传感器数据传输的方案外文翻译资料
- 基于PLC的模糊控制器在污水处理系统中的应用外文翻译资料
- 光伏并联最大功率点跟踪系统独立应用程序外文翻译资料


