英语原文共 14 页,剩余内容已隐藏,支付完成后下载完整资料
国际摩擦学
表面纹理对在稳态和瞬态润滑状态下工作的推力轴承的流体动力学性能的影响文章信息
文章历史:
2016年3月7日收到,2016年5月27日收到修订后的表格
2016年5月28接受,2016年5月30日在线可用
关键词:推力轴承纹理、流体动力学润滑
摘要:
本文介绍了在稳态和瞬态润滑状态下运行的流体动力推力轴承的有限元建模, 所提出的数值算法是保守的,并且使得可以以高精度确定诸如摩擦转矩,膜压力,膜厚度和油流的操作特性,对于不同的操作条件,显示当纹理施加在转子上或定子上时推力轴承的行为不相同, 因此,显示了静止和非静止情况之间的行为差异,最后预测在某些条件下将纹理放置在转子上可以改善推力轴承的流体动力学性能.
1.介绍
它们的主要目的是平衡通常由各种机器部件的重量施加的轴向力,推力轴承几何形状的优化已经是一个多世纪以来的研究主题,并且多年来已经进行了许多改进。 用于优化推力轴承的流体动力学性能的方法(目的是增加承载能力)通常与定子和转子的几何形状有关.
今天新的加工技术的发展允许控制微米甚至纳米级的表面几何形状[1]在这种情况下,表面纹理成为特别有趣的优化方法,因为它可以应用于所有类型的推力轴承,推力轴承的承载能力的增加将允许减小其尺寸,这将与需要机械部件尺寸减小的当前技术趋势一致, 因此,通过表面纹理的推力轴承的优化已经成为越来越多的理论和实验工作的主题[2-10].
纹理可以施加到有限的区域上或推力轴承的整个表面上, 同时,可以在静止表面(定子)上,而且在移动表面(转子)上施加纹理, 从简化的角度来看,本研究仅专注于固定的几何结构配置, 因此需要额外条件的倾斜垫推力轴承,不包括在本研究中.
众所周知,在推力轴承的操作期间可能发生的物理现象是非常多样的,比如热力学和机械变形,未对准或润滑剂不足,所有这些效应都非常复杂,无疑需要非常彻底的理论处理,这些影响也不包括在这项研究中,这允许作者更好地突出表面纹理引入的效果.
本文的第一部分重点介绍了控制推力轴承运行的润滑机理,下面简要介绍本文中使用的基于有限元公式的数值模型,为了证明这种算法在推力轴承的情况下的适用性,本文还包括一个验证程序.
本文的主要部分致力于彻底分析由不同几何特征的纹理对在稳态和瞬态润滑状态下工作的推力轴承的流体动力学性能所产生的影响.
通讯作者E-mail: andrei.gherca@univ-poitiers.fr (A. Gherca).
http://dx.doi.org/10.1016/j.triboint.2016.05.0410301-679X/amp;2016Elsevier Ltd.版权所有.
2.数值模型
2.1原理
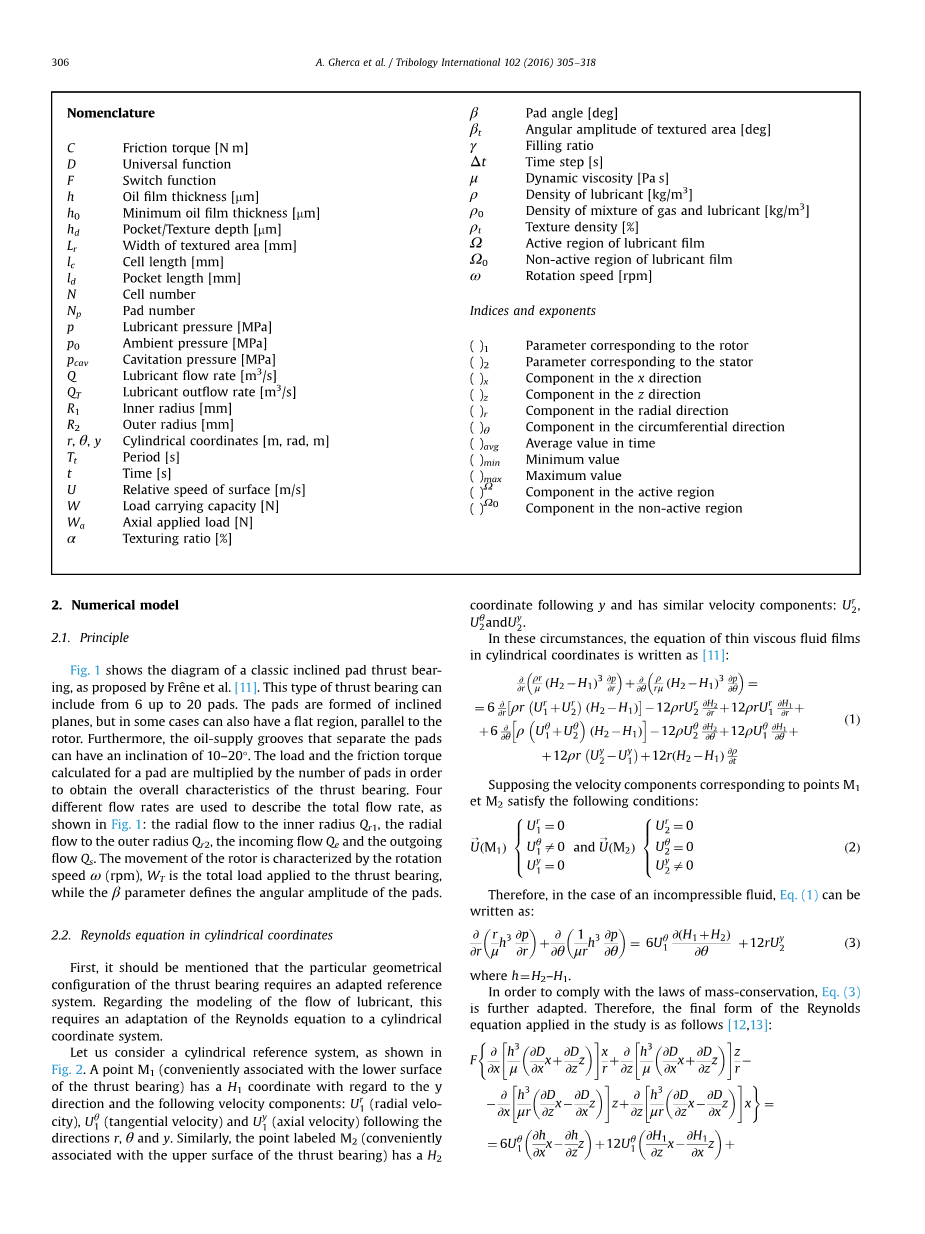
图1示出了由Frecirc;ne等人提出的经典倾斜垫推力轴承的示意图[11]这种类型的止推轴承可以包括6个至20个垫,焊盘由倾斜平面形成,但在一些情况下也可具有平行于转子的平坦区域,此外分离焊盘的供油槽可具有10-20°的倾斜度。 为垫获得的负荷和摩擦转矩乘以垫的数量以获得推力轴承的总体特性使用四种不同的流速来描述总流速如图1所示.
1:到内半径Qr1的径向流量,到外半径Qr2的径向流量,进入流量Qe和流出流量Qs,转子的运动的特征在于转速omega;(rpm)WT是施加到推力轴承的总负载,而beta;参数定义衬垫的角振幅.
2.2圆柱坐标系中的雷诺方程
首先应当提及的是推力轴承的特定几何构造需要适合的参考系,关于润滑剂流动的建模,这需要雷诺方程适应圆柱坐标系.
让我们考虑一个圆柱形参考系,如图1所示,点M1(方便地与推力轴承的下表面相关联)具有关于y方向的H1坐标和以下速度分量:Ur1(径向速度城)Utheta;1(切向速度和Uy1速度)遵循方向r和y类似地,标记为M2(方便地与推力轴承的上表面相关联)的点具有H2.
坐标跟随y并具有类似的速度分量:Ur2,Utheta;2和Uy2.
在这些情况下,圆柱坐标中薄粘性流体膜的方程写为:
假设对应于点M1和M2的速度分量满足以下条件:
在不可压缩流体的情况下,Eq(1)可以写为:
当H=H2-H1.
为了符合质量守恒定律,式(3).因此在本研究中应用的雷诺方程的最终形式如下[12,13]:
命名
C 摩擦扭矩[N m]
D 通用功能
F 开关功能
H 油膜厚度[mm]
h0 最小油膜厚度[mm]
hd 口袋/纹理深度[mm]
Lr 纹理区宽度[mm]
Lc 池长度[mm]
ld 袋长[mm]
N 单元号
Np 填充数
P 润滑剂压力[MPa]
p0 环境压力[MPa]
pcav 气穴压力[MPa]
Q 润滑剂流量[m3/s]
QT 润滑油流出量[m3/s]
R1 内半径[mm]
R2 外径[mm]
Rtheta;y 圆柱坐标[m,rad,m]
Tt 期[s]
T 时间[s]
U 表面相对速度[m/s]
W 承载能力[N]
Wa 轴向负载[N]
alpha; 压花率[%]
beta; 垫角度[deg]
beta;t 纹理区域的角振幅[deg]
图1.经典斜垫止推轴承的图式[11].
图2.坐标系与速度的关系. 图3.插图部分的纹理垫[6].
质量守恒公式是第一次被提出来被Bonneau和Hajjam[14]最早在2000年成功的被作者运用于轴承运动中的稳态和瞬态润滑制度的学习[15-18]由于以前的出版物详细的介绍了气蚀算法因此在这里只有最重要的元素被记录在这里.
D是一种通用的函数,表示在油膜压力(有源区润滑油压力P总是优于空化压力度)和填充因子在非活动区(其中发生气蚀)
D=P-PCAV 度 在起作用的地方.
D=r-H,在不起作用的地方.
r参数描述的润滑剂rho;0流体的密度和气体的混合物rho;密度之间的关系,形成的非作用区
r=
F是一个空化指数如:
F=1.在有源区.
F=0.在非活动区.
Eq.(4)随后通过有限元法(FEM)[12-15]有限元法在计算中应用的主要优势是由其处理复杂几何能力带来了尝试如其他6面模型所带来的其他问题,这自然会导致更难处理,通过其他解决方法膜的不连续性,采用有限元法,模型变得非常柔软和较粗的网格可以用于离散支承垫没有任何重大影响精度,节省了计算能力,一旦D变量确定开采通过有限元法,水动力参数试样 表面油膜的厚度,摩擦力矩和体积流量Q是通过随后的程序确定,应该指出的是,由于推力瓦是适用于整个调查,H0是确定未知.这是通过割线的方法实现的,它是基于一个迭代变化H0直到承载能力W发展成推力轴承的载荷是一致的.
2.3 模型的验证
为了证明使用现状调查的润滑模型的有效性,具体的比较是每形成2007由Marian等人提出的数据[6]这是一个具体的研究实验和数值分析的一个标准是纹理的推力轴承承载了Marian等人的分析.由12个相同的垫,每个纹理相同和分离由12个供油槽,关于变形推力轴承的几何形状,如图3所示,得到后一系列的加工工艺如光刻和蚀刻.
纹理被施加到的推力轴承(定子)的静止表面的表面上,而移动的表面(转子)有一个完全光滑的轮廓,注意该系统没有浸入油中,因此必要的润滑剂是通过喷油嘴供给的.
焊盘的几何形状是在圆周方向的局部变形原理设计(alpha;theta;=50% )和整体变形(alpha;r =90%)在径向方向还应强调,口袋按照圆周方向对称地定位在垫的表面上,同样口袋被定位在中心的方形(虚拟)细胞,这也确保了几何对称性的纹理,口袋的长度等于宽度(Ltheta;= LR = 0.2毫米),而深度HD为9微米,纹理的总密度rho;t=25%,表1给出了用于定义推力轴承的操作条件和所有的几何参数.
除了试验中Marian等人[6]还使用了理论模型来模拟的纹理推力轴承的操作,通过利用气蚀的情况下,没有发生在这种配置中,作者能够应用传统的形式的雷诺兹方程(在圆柱坐标)随后通过有限差分法离散化,确定温度场产生的整个垫,采用Couette近似,即忽略了压力梯度对剪切应力的影响,该模型采用了Marian等人也忽略了润滑剂和轴承垫之间的热交换.
图4显示了理论与实验结果的比较(以最小油膜厚度和扭矩C条款)由Marian等人提出的[6]通过本研究中提出的模型得到的数值解.考虑到这里提出的配方忽略的变化的温度和粘度的润滑剂横跨轴承垫,结果是在非常好的协议,一个由160000个元素组成的网格(400x400)得到的结果通过有限元模型计算结果与一般位于由Marian等人提供的实验结果之间,除了热效应,DIF的数值解与实验结果之间的差异这一事实可以承载不浸泡在油浴中还解释说,这导致在接触一些地区一定缺油,数值缺油时不计算中考虑,从而解释了最小油膜厚度最小厚度的高估和低估的摩擦力矩C.
对于一个给定的情况下(Wa=200N和omega;=500rpm)表2显示的最小油膜厚度和对摩擦力矩C.结果表明,为了获得精确解的网格的影响,该模型需要在周向和径向方向上的一个很好的网格,这主要是由于口袋组成纹理的几何数量大(Nr=38和Ntheta;=22)因此由40000个元素(200x200)组成的网格变得不足,导致相对偏差较大,为了减少网目尺寸的影在这个特定的情况下.
表1.操作条件和几何参数,如Marian等人提出的[6].
|
推力轴承的一般特性 功率N P 12 轴向施加载荷[N] Wa 100and200 转速[rpm] omega; 500to80 动态粘度[ PaS]0.022 油的密度[kg/m3] rho; 848 焊盘入口油温[oC] 45 几何尺寸 内半径[mm] R 1 28.5 外半径[mm] R 2 45 垫角[deg] beta; 28° 纹理几何 口袋的形状 平行六面体 口袋长[mm] ltheta; 0.2 口袋宽度[mm] l r 0.2 口袋深度[mm] hd 9 在圆周方向 Ntheta; 22 口袋号码在径向 N r 38 变形比在圆周方向alpha;theta;5 径向 剩余内容已隐藏,支付完成后下载完整资料 资料编号:[139784],资料为PDF文档或Word文档,PDF文档可免费转换为Word |
您可能感兴趣的文章
- 饮用水微生物群:一个全面的时空研究,以监测巴黎供水系统的水质外文翻译资料
- 步进电机控制和摩擦模型对复杂机械系统精确定位的影响外文翻译资料
- 具有温湿度控制的开式阴极PEM燃料电池性能的提升外文翻译资料
- 警报定时系统对驾驶员行为的影响:调查驾驶员信任的差异以及根据警报定时对警报的响应外文翻译资料
- 门禁系统的零知识认证解决方案外文翻译资料
- 车辆废气及室外环境中悬浮微粒中有机磷的含量—-个案研究外文翻译资料
- ZigBee协议对城市风力涡轮机的无线监控: 支持应用软件和传感器模块外文翻译资料
- ZigBee系统在医疗保健中提供位置信息和传感器数据传输的方案外文翻译资料
- 基于PLC的模糊控制器在污水处理系统中的应用外文翻译资料
- 光伏并联最大功率点跟踪系统独立应用程序外文翻译资料


