
英语原文共 4 页,剩余内容已隐藏,支付完成后下载完整资料
关于车道线识别的研究
谭辉,王建峰,张琨,崔生明
汽车工程学院,哈尔滨工业大学(威海),威海,264209,中国
ahittanhui@163.com, bwjfeee123@163_com,chit一zhangkun@126.com,dcsmhit@sina.com
摘要:如今随着交通事故的频发,智能车辆发展得越来越迅速。在智能车的许多研究方向中,视觉导航成为当下的热点。本文提出了一种左右车道线检测的算法,这种算法结合了边缘检测和霍夫变换,首先检测最初的车道标志性,然后追踪最后的目标线。仿真结果显示这种算法可以识别当下的车道线使车辆导航更加精确和迅速。
关键字:车道线标记;车道线识别;霍夫变换;图像处理
- 简介
智能车辆[1]作为一种自主导航车辆被人们所熟知,是一种结合了一系列技术综合系统,例如环境感知,计划决策,实时控制,多功能辅助驾驶等技术。它可以通过机器视觉来感知道路位置信息,然后可以在没有人为干涉的情况下安全可靠地沿着预期的道路驶向目的地。本文的主要内容是关于在结构化道路上的车道标志性识别。根据智能车的定义,在结构化条件下,智能车可以通过它的前方道路图像和自身所拥有的控制算法来识别车道标志线。
近些年来,国内外许多研究已经取得了很大的突破[2-5],但是仍然存在许多问题还未解决。本文通过在二进制图像中使用霍夫变换来识别目前的左右车道线,取得了不错的效果。
- 算法描述
通过摄像头拍摄的前方道路图像是近场图像,假设前方车道线是笔直状态且平行于车辆中央的车轴,道路是平坦的且道路的坡度很小,我们起初得到道路图像后需要对图像进行预处理包括挑选感兴趣区域和灰度变换。在对初始图像进行预处理后,需要在图像分割中使用阈值分割和边缘检测装置。然后我们用霍夫变换来识别所有的标线作为初始检测结果,最后,根据目标标线的特点,使用一个新算法来识别车道标线。
- 获取预处理的道路图像
道路图像由灰色相机获得的。该算法通过MATLAB平台进行验证。首先挑选感兴趣区域。由于远处的树木,建筑物灰度的变化,道路图像中的天空增加了图像处理时间,对图像的道路面积形成了干扰,所以我们应该划分ROI[6]——感兴趣区域。这就是说,我们应该选择是对我们有用的区域,这样可以提高速度和工作可靠性。
道路信息主要是集中在图像的下部,因此,我们把它划出来作为初始图像。通过计算摄像机的高度和角度,我们选择的ROI,结果在图1中示出,(a)是由灰色照相机,(B)所获得的初始图象是ROI。
灰度变换:通过使用图像增强技术来增强背景(路面)和目标(标线)之间的对比度,这有利于接下来的边缘检测。在本文中,我们采用灰度变换,一种图像增强技术。
灰度图像中的每个像素都有一定的灰度值。假定原始像素灰度值,所处理的像素的灰度值。灰度级变换是:
(1)
在等式1中,T [D]被称为灰度变换函数,它主要显示了输入灰度值与输出灰度值之间的转换关系。不同的灰度变换函数将得到不同的结果,因此灰度变换函数应根据图象的性质和处理的目的来选择。选择的标准是,经过灰度变换,像素的的动态范围增加,图像的对比度增加。灰度变换的方法包括:线性变换,分段线性变换和非线性变换。
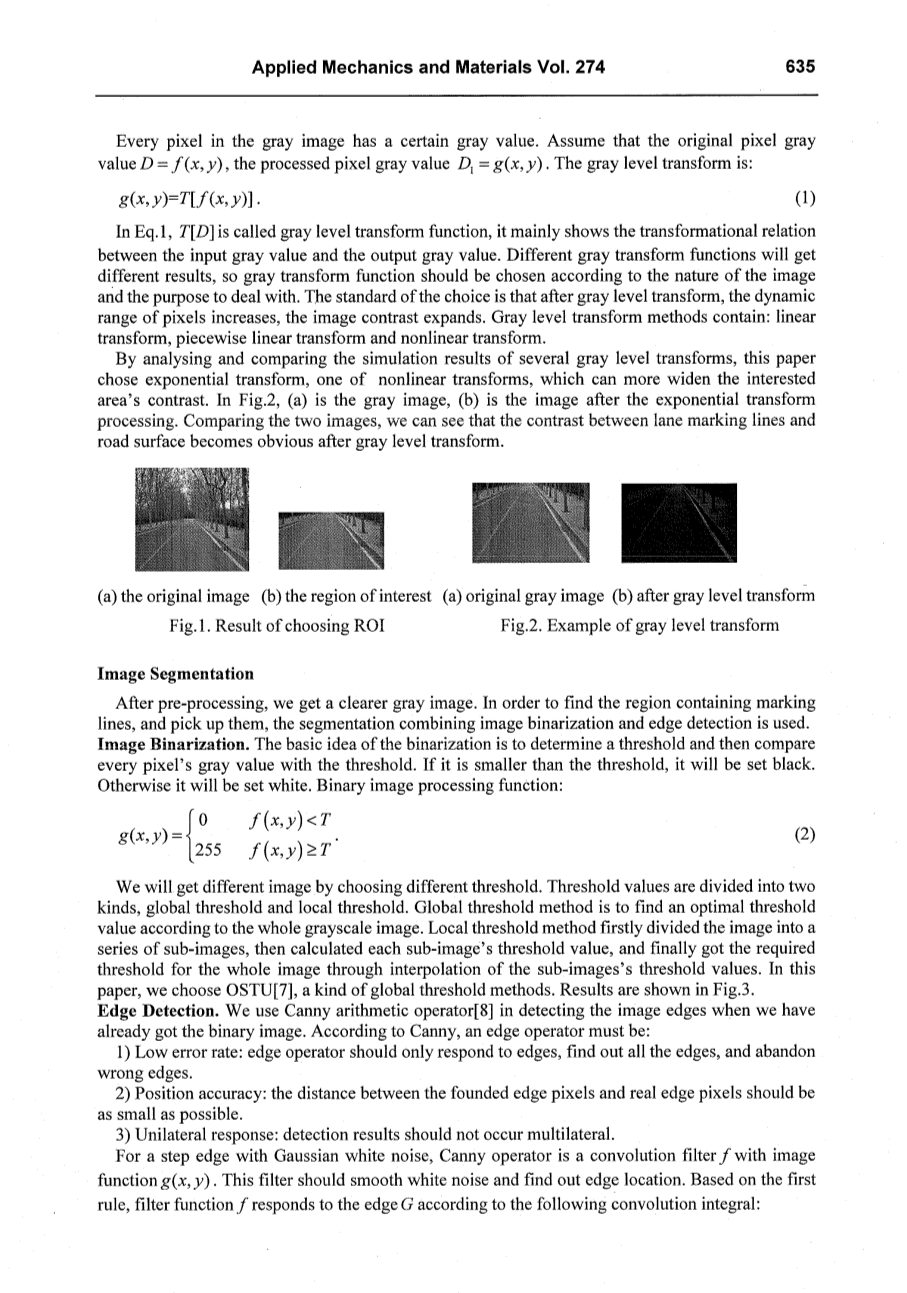
通过分析和比较的几个灰度级转换的模拟结果,本文选择指数变换,一种非线性变换,从而能更扩大感兴趣区域的对比度。在图2中,(a)是灰度图像,(B)是指数变换处理后的图像。两个图像进行比较,我们可以看到,经过灰度变换车道标记线和路面之间的反差变得很明显。
(a)原始图像 (b)感兴趣区域 (a)原始灰度图像(b)灰度变换后的图像
图1选择ROI的结果 图2灰度变换的样例
- 图像分割
在对图像进行预处理后,我们得到更清晰的灰度图像。为了找到包含标线的区域中,并把他们挑选出来,我们使用图像分割结合图像二值化和边缘检测技术。图像二值化:二值化的基本思想是首先确定阈值,然后与阈值比较每个像素的灰度值。如果是小于阈值,它将被设为黑色。否则,将被设置为白色。二进制图像处理函数:
(2)
我们将通过选择不同的阈值获得不同的图像。阈值被分为两种,全局阈值和局部阈值。全局阈值的方法是根据整个灰度图像找到一个最佳阈值。局部阈值方法首先分割该图像成一系列子图像,然后计算出每个子图像的阈值,最后通过子图像的阈值的插值得到对整个图像所需的阈值。在本文中,我们选择OSTU[7],是一种全局阈值的方法。结果示于图3。
边缘检测:我们使用Canny算子[8]检测图像的边缘时,我们已经得到了二进制图像。根据Canny算子的定义,一个边缘算子必须满足:
- 低误码率:边缘算子应只响应边缘,找出所有的边缘,并放弃错误的边缘。
- 定位精度:被找到的边缘像素和实际边缘像素之间的距离应尽可能小。
- 单侧回应:检测结果应该不会出现多边的。
对于高斯噪声阶跃边缘,Canny算子是一个象函数g(x,y)的回旋过滤器。该过滤器应平滑噪声,并找出边缘位置。基于第一规则,滤波器函数f根据以下卷积积分响应边缘G:
(3)
假设[-w,w]的邻域内,f的值为零,则3条规则的数学表达式为:
(4)
SNR是输出信号和噪声的比值。信号越强,信噪比值越大。Localization是检测出的边缘和真实边缘之间的距离的倒数。它的值越大说明距离越近。是一个约束条件,是零交叉点之间的平均距离。Candy算子结合了以上公式SNR*Localization/,并找到最好的过滤器,最后用高斯一阶导数来过滤是一种有效的方法。
一维高斯表达式:
二维高斯表达式:
二维卷积是复杂的,它可以分解成两个一维卷积。此外,差分可以解析成两个方向的一维卷积。因此,Candy算子可以使用一维卷积实现边缘检测,基本步骤如下:
- 用高斯滤波器对图像进行卷积。
- 计算图像的梯度的幅值和方向。
- 把最大抑制比应用到梯度和幅值。
图4是边缘检测结果:
图3二值化后的图像 图4边缘检测后的图像
- 车道标线检测:
只有获得当前车道标记线,我们可以才能车辆正确地导航。基于道路边缘图像,本文提出Hough变换方法,首先使用Hough变换获取当前所有车道标线,然后设计算法获得目标车道标线[9]。
初始边界的检测:我们使用Hough变换[10]来检测所有的车道线。霍夫变换的原理是,在图像的空间和在极坐标的点的空间的直线具有一对一的关系;与此同时,在图像空间中的点和在极坐标空间中的正弦曲线具有一对一的关系。这样,在图像空间中直线检测变成正弦曲线节点检测在极坐标空间。图5是初始边界检测结果。
图5初始边缘检测结果
车道标线的识别:一些直线的是错误的提取结果,有些是不必要的。这些车道标线必须被移除。
分析车道标线的特点,车道的坡度左标记线和车道的右侧标示线斜率具有以下特征:
- lt;0,gt;0;
- 如果有多条车道线,在线和x轴之间的角度是所有左边车道线最大的,在线和x 轴之间的角度是所有右边车道线最小的。
基于该分析,下面的算法可以正确实现左右车道线线的延伸识别:
- 分类:把由霍夫变换获得的线分为两类,根据坡度,如果,舍弃该结果。如果 ,把它放到左边。否则,把它放到右。
- 找到目标标线:在左侧,需要斜率是最小的。在右侧,需要其斜率线是最大的。
- 显示:通过坐标变换重新绘制初始图像上的目标线。
- 测试结果与结论
为了检查我们的算法,我们通过MATLAB平台进行实验。以下图片是一些正确的结果,检测结果如图片6所示:
图6一些正确结果的样例
本文提出了基于直线模型的标线检测方法,通过模拟的结果,我们可以看到,该方法具有极大的鲁棒性和实时性。但因为路面是复杂的,它不能适用于所有的条件。
资料编号:[31907],资料为PDF文档或Word文档,PDF文档可免费转换为Word
- 参考文献:
- Li Jin, Road Recognition and Tracking Control of Vision-Guided Intelligent Vehicle, Hefei University of Technology,Dissertion for the Doctor Degree,2008.
- Abdulhakam.AM.Assidiq,Othman O.Khalifa, Vision-Based Lane Detection for Autonomous Artificial Intelligent Vehicles, IEEE International Conference on Semantic Computing, (2009) 636-641.
- Chun-Wei Lin, Din-Chang Tseng, A Robust Lane Detection and Verification Method for Intelligent Vehicles,Third International Symposium on Intelligent Information Technology Application, (2009) 521-524.
- S. Kim, J. Park, S.I. Cho, et. al. Robust Lane Detection for Video-Based Navigation Systems, the 19th IEEE International Conference on Tools with Artificial Intelligence, (2007) 535-538.
- Philippe Foucher, Yazid Sebsadji,Detection and Recognition of Urban Road Markings Using Images, the 14th International EEEE Conference on Intelligent Transportation Systems, (2011) 1747-1752.
- Jia He, Hui Rong, A Lane Detection Method for Lane Departure Warning System,International Conference on Optoelectronics and Image Processing,(2010) 28-31.
- Huaizhong Chen,Zheliang Jin, Research on Real-time Lane Line Detection Technology Based on Machine Vision, International Symposium on Intelligence Information Processing and Trusted Computing, (2010) 528-531.
- Weina Lu,Research on methods for Vehicles Vision Navigation, Northwestern Polytechnical University, Dissertation for the Master Degree, 2006.
- Dong Li, Research on Lane Detection Based on Hough Transform,the International Conference on Information Technology and Scientific Management, (2010) 535-539.
- Dezhi Gao,Wei Li,A Practical Method of Road Detection for Intelligent Vehicle, the IEEE International Conference on Automation and Logistics, (2009) 985-985. <!--
剩余内容已隐藏,支付完成后下载完整资料
您可能感兴趣的文章
- 饮用水微生物群:一个全面的时空研究,以监测巴黎供水系统的水质外文翻译资料
- 步进电机控制和摩擦模型对复杂机械系统精确定位的影响外文翻译资料
- 具有温湿度控制的开式阴极PEM燃料电池性能的提升外文翻译资料
- 警报定时系统对驾驶员行为的影响:调查驾驶员信任的差异以及根据警报定时对警报的响应外文翻译资料
- 门禁系统的零知识认证解决方案外文翻译资料
- 车辆废气及室外环境中悬浮微粒中有机磷的含量—-个案研究外文翻译资料
- ZigBee协议对城市风力涡轮机的无线监控: 支持应用软件和传感器模块外文翻译资料
- ZigBee系统在医疗保健中提供位置信息和传感器数据传输的方案外文翻译资料
- 基于PLC的模糊控制器在污水处理系统中的应用外文翻译资料
- 光伏并联最大功率点跟踪系统独立应用程序外文翻译资料


