使用非线性多模型、开关和调谐方法的pH控制
作者:Mahmoud Reza Pishvaie and Mohammad Sharokhi*
单位:Chemical Engineering Department, Sharif University of Technology, Tehran, I.R. Iran
摘要:众所周知,由于其高度的非线性性质,pH控制是一个具有挑战性的问题。人们提出了几种控制pH值的策略,其中包括强酸当量方案。尽管这种技术对建模误差具有鲁棒性,但如果滴定曲线发生较大变化,控制器的性能就会下降。为了克服这个问题,本工作提出了两种基于强酸当量策略的控制方案,并采用了多模型、开关和调谐方法。在建模方面,考虑了固定模型和自适应模型。一个实验装置被用来评估拟议方案的性能。通过计算机模拟和实验结果证明了所提方案的有效性。
引言
由于pH控制具有强非线性,pH控制被认为是一个经典而困难的控制问题。pH控制问题突出反映在工艺流的滴定曲线上。另一方面,pH控制已经在不同的行业中找到了许多应用。文献中明确指出,传统的比例积分导数(PID)控制器在控制pH值过程中性能不佳。文献中出现了许多关于pH值建模和控制的研究。McAvoy等人[1]从第一原理,即物料平衡和化学平衡原理,为单酸单碱的pH过程建立了一个动态模型。Gustafsson和Waller将这一方法扩展到一般的pH过程[2]。如果该过程被看作是一个随时间线性变化系统,就可以使用线性自适应控制。Gupta和Coughanowr,[3]Buchholt和Kummel[4] Palancar等人,[5]和Mahuli等人的研究[6]均是关于线性自适应控制器被用于pH中和过程。应对pH过程的非线性特征的另一种方法是使用非线性控制方法。非线性控制器可以是自适应的或非自适应的。Goodwin等人[7]在氢离子和羟基离子浓度差异的基础上提出了一种线性和非线性自适应控制器。Gustafsson和Waller[2]和Gustafsson[8]提出了反应不变体(RI)的概念,在此基础上,他们提出了一个非线性自适应控制器,并将其用于控制多组分的pH过程。后来,Gustafsson和Waller[9]提出了一个非线性自适应控制方案,使用的模型由总离子浓度和虚构的弱酸的解离常数组成。Wright和Kravaris[10]将RI pH过程模型简化为一阶状态方程,并引入了强酸当量(SAE)的概念。他们的控制策略产生了良好的性能,并且对建模误差具有鲁棒性。然而,当滴定曲线发生大的变化时,该控制器显示出较差的性能。Lee等人[11]提出了一种使用中继反馈的自动调谐方法来改善SAE控制器的性能。Sung和Lee[12]使用设定点变化法来识别滴定曲线并补偿pH过程的非线性和时变特性。上述两种技术都使用自动调谐程序,需要对工厂进行激励。励磁是手动进行的,并且假定在励磁期间负载没有变化。因此,这些控制策略不适合于滴定曲线变化非常频繁的情况。一些研究人员提出了不同的技术来在线识别滴定曲线。比如,Nortcliffe和Love[13]、Sung等人[14]和Nichols和Sinhaa[15]的研究。这些方法的缺点是需要额外的测量和设备。另一种处理pH控制的方法是使用智能算法,如人工神经网络或模糊理论。Palancar等人[16]和Ylen和Jutila[17]的作品可以归入这一类。
类似于SAE ,在本研究中,基于控制目标提出了两种控制方案。为了补偿滴定曲线的变化,本研究采用了多模型、切换和调整(MMST)技术。
多模型的使用在控制理论中并不新鲜。事实上,Lainiotis[18]和Athanes等人[19]在20世纪70年代为提高控制问题中状态估计的准确性,提出了多个卡尔曼滤波器,以。Schott和Bequette[20]用一组自适应模型来控制一个聚合反应器。Banerjee etal.[21]提出了一个基于调度多模型的非线性控制器。
在这些方案中,只使用了控制器的线性组合,并没有考虑开关。此外,这些系统的稳定性结果还没有被报道。近年来,开关被发现在自适应稳定[22-23]和高度非线性系统的识别方面非常重要。[24]在这项工作中,我们提出了两个基于SAE方法的控制方案,它们使用了多模型、开关和调整技术。本文的组织结构如下。首先,回顾了pH过程的建模和滴定曲线的合成,讨论了MMST方法。其次,考虑了控制器的设计。最后,通过计算机模拟和实验结果证明了所提方案的有效性。
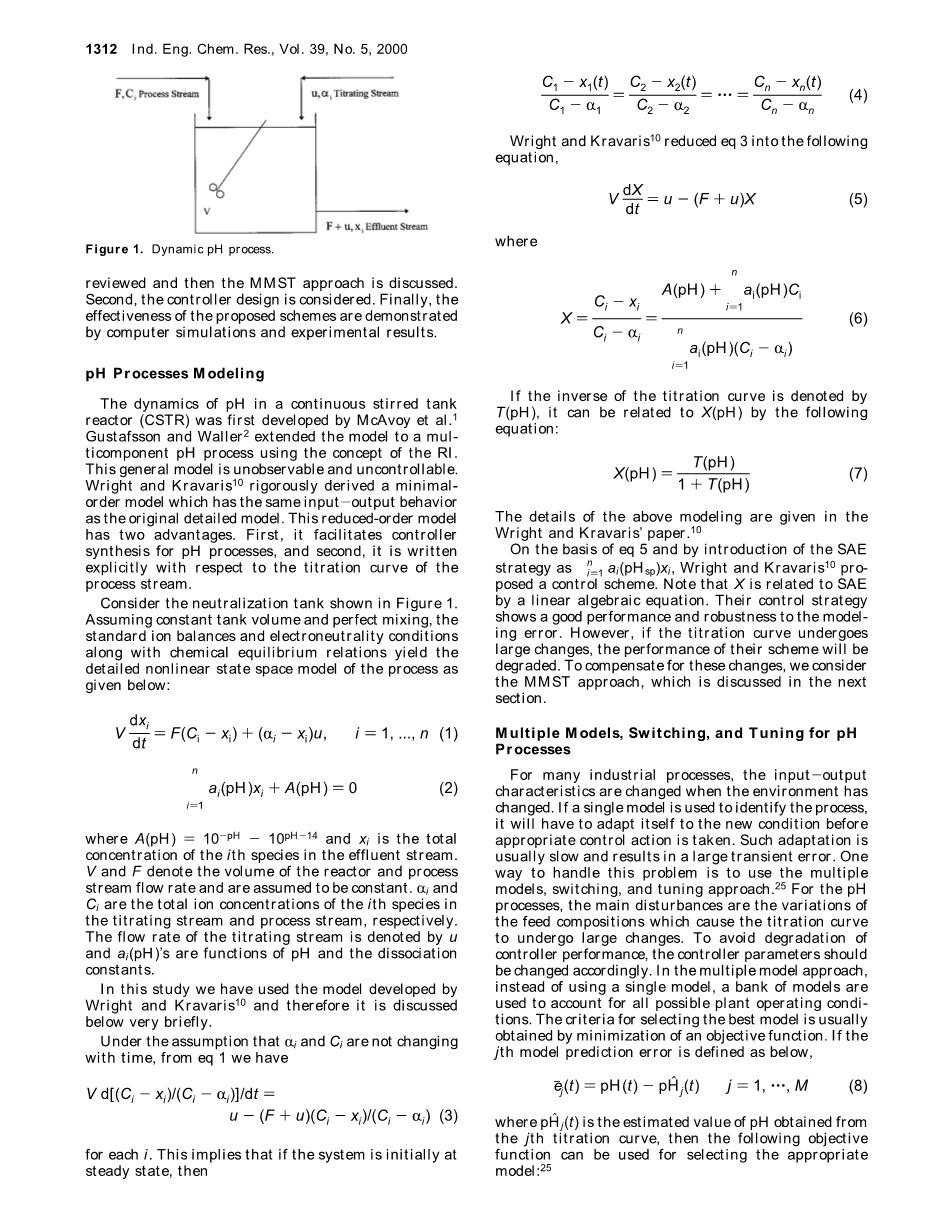
图1 动态pH过程
pH过程建模
pH值的动态连续搅拌釜反应器(CSTR)最初是由麦卡沃伊等[1]。Gustafsson和Waller[2]利用RI的概念将该模型扩展到多组分的pH过程。这个一般模型是不可观察和不可控制的。Wright和Kravaris[10]严格地推导出一个最小阶模型,它的输入-输出行为与原来的详细模型相同。这种减序模型有两个优点。首先,它有利于pH过程的控制器合成,其次,它是相对于过程流的滴定曲线明确编写的。
考虑到图1所示的中和罐。假设罐体容积恒定和完全混合,标准离子平衡和电中性条件以及化学平衡关系产生了该过程详细的非线性状态空间模型,如下所示。
其中A(pH) )10-pH – 10pH-14,xi是流出物流中第i种物质的总浓度。V和F表示反应器的体积和工艺流的流量,并假定为常数。和Ci分别是滴定流和工艺流中第i种物质的总离子浓度。滴定流的流速用u表示,
在这项研究中,我们使用了Wright和Kravaris[10]开发的模型,因此下面将非常简要地讨论它。
在和Ci不随时间变化的假设下,从公式1中可见对每个i都有。
这意味着如果系统最初处于稳定状态,那么
Wright和Kravaris[10]将公式3简化为以下公式。
其中
如果用T(pH)表示滴定曲线的倒数,它可以通过以下公式与X(pH)相关。
上述建模的细节在Wright和Kravaris的论文中给出。
在公式5的基础上,通过引入SAE策略为提出了一个控制方案。请注意,X通过线性代数方程与SAE相联系。他们的控制策略显示了良好的性能和对建模误差的稳健性。然而,如果滴定曲线发生大的变化,他们的方案的性能就会下降。为了补偿这些变化,我们考虑采用MMST方法,这将在下一节讨论。
pH过程的多种模型、切换和调谐
对于许多工业过程来说,当环境发生变化时,输入-输出特性也随之改变。如果用一个单一的模型来识别过程,在采取适当的控制行动之前,它将不得不使自己适应新的条件。这种适应通常是缓慢的,并且会导致很大的瞬时误差。处理这个问题的方法之一是使用多模型、切换和调整方法。[25] 对于pH过程,主要的干扰是进料成分的变化,导致滴定曲线发生巨大变化。为了避免控制器的性能下降,控制器的参数应作相应的改变。在多模型方法中,不是使用单一模型,而是使用一组模型来考虑所有可能的工厂运行条件。
选择最佳模型的标准通常是通过目标函数的最小化来获得。如果第j个模型的预测误差定义如下。
其中是由第j条滴定曲线得到的pH估计值,那么可以用以下目标函数来选择合适的模型:[25]
在上式中,lambda;gt; 0,gamma;ge;0是设计(开关)参数。公式9的递归形式给出如下。
其中T为采样时间,下标k表示第k个时间间隔。为了避免快速切换,在目标函数的最小化过程中使用了滞后算法。23 如果在采样时间k时正在使用模型编号j,并且=min{},那么如果 ,模型编号j将被保留,否则切换到编号m。这里,gt;0是滞后常数。下面将介绍的过程,我们有
考虑到M模型,公式11变成
有了,从公式12可以得到每个模型的()的值,从而得到采样时间k的pH估计值,即。
模型切换算法可以总结为以下几点。首先,通过实验或对滴定曲线进行参数化并通过实验数据确定模型参数来准备一组模型(滴定曲线)。其次,在每个采样时间,从公式12中得到每个模型(j ) 1, ..., M)的()。使用()和模型集。
可以得到每个模型的(k)。有了(k),模型误差, (j=1, ..., M)可以从公式8中计算出来,从而通过公式10得到每个模型的成本函数的值。具有最小的模型被选为合适的模型。
评论:大多数多重模型技术都适用于动态输入-输出模型。然而,在本研究中,MMST方法被用于估计由非线性代数方程给出的滴定曲线。
控制算法
控制策略是基于SAE技术[10]。公式5用于控制器设计,公式7用于通过pH测量估计X。如果工艺流的滴定曲线变化不是很频繁,就可以得到准确的X估计值,从而对pH过程进行有效控制。该方法的示意图见图2。一旦X被在线估计,剩下的就是设计控制器。对于大多数工业应用来说,滴定流比工艺流(u le; F)的浓度要高得多,因此,公式5可以写为
图2 利用测量pH值的非线性控制结构和X的在线估计的非线性控制结构
图3 固定MMST算法的流程图
公式13的离散形式如下:
其中=V/F,=1/F。
在公式14的基础上,使用极点定位技术,速度形式的PI控制器方程及其参数给出如下。
其中
p1和p2是期望的极点。是对X的估计,由切换模块识别的最合适的滴定曲线获得。请注意,当切换发生时,公式15中的术语被改变,并导致控制器性能的改善。图3显示了拟议算法的流程图。
如果必须考虑双线性,那么修改后的PI控制法将如下所示。
图四 自适应MMST算法的流程图
用自适应模型进行切换和调整
获得自适应方案的第一步是以参数化的方式界定问题。因为pH过程的强非线性反映在滴定曲线上,我们可以对进水流的滴定曲线进行参数化。然而,由于这是一个建模问题,因此任何简单的滴定曲线的参数化都可以被使用。在这项工作中,每个滴定曲线由以下凸的线性参数化关系来建模。
在公式17中,是已知物种和浓度(最大和最小)的基础滴定曲线。人们可以用M条滴定曲线,N维参数向量来说明过程滴定曲线的变化。M和N应该足够大,从而涵盖整个pH值的变化范围。减少M的一种方法是使用自适应模型XR。
对于一个自适应版本,我们有M个固定的模型和它们相应的固定的,以及一个额外的模型,其变量可以连续变化。在每个采样时间,被更新,直到模型切换发生。在这种情况下,被重新初始化为所选模型的,并继续适应。重新初始化被用来加快的收敛速度。这正是利用切换来确定适应的良好初始条件所要达到的目的。通过这种策略,在相同的性能水平下,可以获得固定模型数量的减少。
图4显示了拟议方案的流程图,该方案采用固定和自适应模型的组合。
在下文中,将考虑两次开关发生之间XR(pH)的适应性。
在时间(k - 1)T和kT上写出公式17,得到
在上述方程中,我们假设参数在两个采样时间之间没有变化。通过将公式18和19代入公式12,我们可以得到
其中
表1 仿真实例中使用的参数值
如果
任何递归识别方法,如递归最小二乘法或梯度算法都可用于更新
计算机模拟
为了证明所提出的方案的有效性,我们对一个合成的、相当复杂的系统进行了计算机模拟。我们选择了一个由一个强酸、一个双腐弱酸(值为2和8)和七个单腐弱酸(pK值为3、4、5、6和7)组成的系统进行模拟,并由氢氧化钠中和。表1中给出了系统的参数和初始稳态值。在时间点[10],入口浓度改变。标称滴定曲线及其在干扰前后的变化如图5所示。图6显示了非自适应SAE控制器和建议的MMST方法对第一个干扰的闭环响应,即从标称溶液到酸性溶液的变化。闭环极点被指定为0.9,名义滴定曲线被用于估计SAE控制器的X(见图5)。可以看出,拟议方案的性能是优越的。第二个干扰是以相反的方向改变饲料浓度。图7显示了上述两个具有相同调谐的控制器的闭环响应。可以看出,非自适应的SAE非常迟钝。应
剩余内容已隐藏,支付完成后下载完整资料

英语原文共 9 页,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[597942],资料为PDF文档或Word文档,PDF文档可免费转换为Word
您可能感兴趣的文章
- 饮用水微生物群:一个全面的时空研究,以监测巴黎供水系统的水质外文翻译资料
- 步进电机控制和摩擦模型对复杂机械系统精确定位的影响外文翻译资料
- 具有温湿度控制的开式阴极PEM燃料电池性能的提升外文翻译资料
- 警报定时系统对驾驶员行为的影响:调查驾驶员信任的差异以及根据警报定时对警报的响应外文翻译资料
- 门禁系统的零知识认证解决方案外文翻译资料
- 车辆废气及室外环境中悬浮微粒中有机磷的含量—-个案研究外文翻译资料
- ZigBee协议对城市风力涡轮机的无线监控: 支持应用软件和传感器模块外文翻译资料
- ZigBee系统在医疗保健中提供位置信息和传感器数据传输的方案外文翻译资料
- 基于PLC的模糊控制器在污水处理系统中的应用外文翻译资料
- 光伏并联最大功率点跟踪系统独立应用程序外文翻译资料


