
英语原文共 14 页,剩余内容已隐藏,支付完成后下载完整资料
技术备忘表
纳米尺度笛卡尔运动的平行运动学
关键词:多轴定位纳米精度弯曲关节弯曲平行运动弹性机构弱链接机构镜像定位超精度机构笛卡尔拓扑
提出了一种在纳米范围内实现高负载容量多轴定位级的新设计。对于约10毫米且不具有高的刚度,利用基于梯形排列的平行运动拓扑,发展了支持六个笛卡尔自由度的一般设计原则。它是与新型的柔性和驱动同步加速器光学在超高真空下一起开发的。描述了该装置的性能及其运动学特性,以及对六种运动及其串扰的高分辨率测量。该设计的应用自1998年以来一直在日常运行中。从那时起,已有30多种衍生物具有突出的特点和优良的可靠性。
copy; 2008 Elsevier Inc. All rights reserved
1.介绍
为了在光束线中利用第三代同步辐射源的高亮度,镜像运动必须在六个自由度中以纳米和纳米级的精度进行。到目前为止,线性和旋转阶段的结合与滚动和滑动轴承已被用于多轴定位运动。这些东西被堆叠在一起,以建立一组特定的自由度。通常使用度角仪,使旋转轴周围的空间自由地调整物体。这样,镜像就可以围绕其反射面的中点旋转,这样光束就不会远离这一点了。
由于制造公差的原因,滚滑阶段的比赛和滚动单元存在形状误差。结果,五个笛卡尔误差运动叠加在这样堆叠排列的所期望的单轴运动上。
误差运动的一部分是系统的,在重复运动到同一位置时将被再现。另一方面,滚动轴承由于滚动元件和滚道的“山”和“谷”的非重复接触而产生随机误差运动。这些随机误差运动从根本上决定了一个定位系统的可达到的精度。如果在一个多轴阶段中,一个单轴运动的误差要用其他轴的运动来补偿,就会产生新的误差运动。多次闭环迭代可以提高达到期望位置的精度。然而,其准确性最终受到个体机制不规范的影响。
滑动轴承可以比滚子轴承更好的精度,因为接触面可重复地耦合。然而,发挥和摩擦妨碍了比滚子轴承更好的定位精度。
液压和防静电轴承在纳米范围内达到所需的精度。然而,对于目前的应用,它们过于复杂,而且不能使用真空系统。
一种非常不同的方法体现在一个平行的运动学引导机制中。在空间平行运动学类中,六足足动物是最受欢迎的系统,但它不能直观地定位,因为其支柱与笛卡尔运动无关。因此,每个支柱的控制器和电机驱动器都是必要的。然而,由于复杂的运动学原因,笛卡尔平台运动的精度低于单个支柱运动的精度。单个支柱运动与笛卡尔平台运动的耦合限制了精度,即使是广泛配置的计算机控制的六轴足动物。
T. Noll et al. / Precision Engineering 33 (2009) 291–304
图1.平行基因图在零和移位位置。驱动支柱画为伸缩支柱,用粗线表示。
图2.平行四边形零位置(全线)和置换位置(虚线)。
- 笛卡尔式支柱机构的基础
2.1.平行线图排列
对于小距离上的线性运动,通常使用平行四边形机制,它们由至少两个相同长度的支柱组成,它们平行地排列在一个固定的底座和一个要移动的平台之间,这些支柱的两端都有弯曲的接头。为了驱动该机构,第三个长度可调的支柱被平行于平台的移动方向放置。
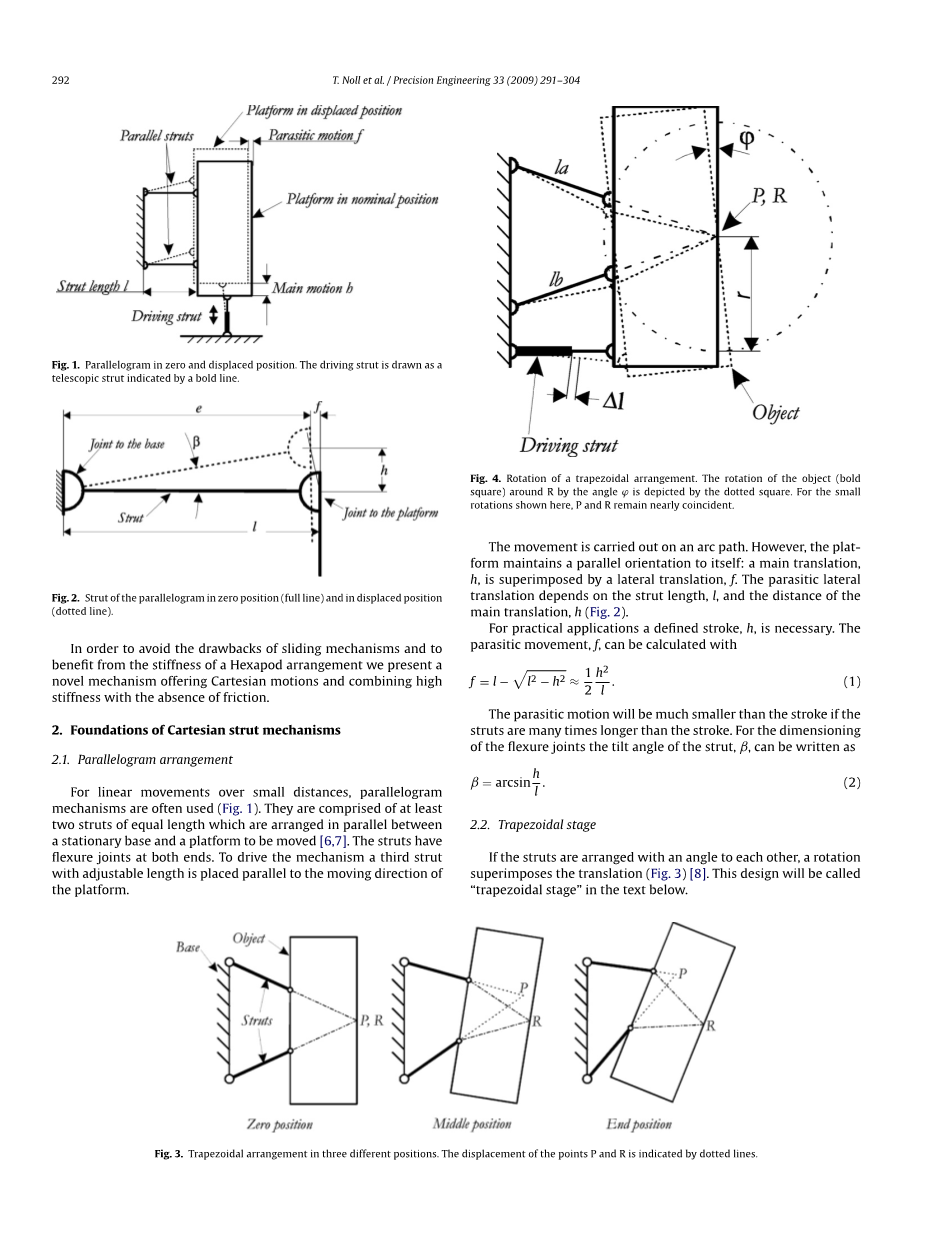
图4.呈梯形排列的旋转。对象(粗体正方形)围绕R的角度ϕ的旋转用虚线方块表示。对于这里显示的小旋转,P和R几乎保持一致。
为了避免滑动机构的缺点,并受益于六足动物排列的刚度,我们提出了一种新的机构,提供笛卡尔运动,并结合高刚度和无摩擦的情况下。
该运动是在一个弧形路径上进行的。然而,平台保持了一个平行的方向:主平移h由横向平移f叠加。寄生的横向平移取决于支柱的长度l和主平移的距离h
对于实际应用,一个定义的行程,h,是必要的。寄生运动,f,可以用
如果支柱比行程长许多倍,寄生运动将比行程小得多。对于弯曲接头的尺寸,支柱的倾斜角ˇ可以写为
2.2.梯形阶段
如果支柱以一个角度排列,旋转叠加平移,这个设计将在下面的文本中被称为“梯形阶段”。
梯形排列在三个不同的位置。点P和点R的位移用虚线表示。
T. Noll et al. / Precision Engineering 33 (2009) 291–304
图5.梯形排列在两个位置。P的位移在X方向和Y方向上表示。
平台的旋转是围绕着支柱的中心线的交点P进行引导的。点R参照平台,与P在梯形排列的零位置共线。在支柱的运动过程中,P也会移动,因此R也会移动。
第三支杆的长度可调,用于驱动平台,(图4)驱动支柱的作用线与临时杆P有一个正常的距离r。平台运动的角度分辨率∆phi;可以使用驱动支柱Delta;l和r的纵向分辨率计算
2.3.梯形级的寄生虫运动
在平台的移动过程中,P和R都在移动。Px和Py的距离(图5)显示通过P的旋转轴的位移。尺寸fx和fy分别是点R在水平和垂直方向上的位移。这个角度是由零位置的杆定义的。P和R的位移除转角外,还由转角alpha;和支柱长度l决定。图6显示了寄生运动fx和fy作为转角的函数。支柱长度为L=60mm,总长度为L=100mm,角度ϕ为位移角。
图显示,对于小的位移角度,R的运动非常小。支柱之间的角度alpha;对r的运动影响很小。较小的角度alpha;导致较小的寄生运动。
支柱长度l对寄生运动的影响如图7所示,对于ϕ=1◦的固定位移角度,支柱长度l在10到85mm之间变化。平台的厚度适用于L=100mm,角度alpha;为90◦
对于较长的支柱,点R在X和Y方向上的运动变小。该变量设计参数对寄生运动的影响大于支柱之间夹角的变化alpha;。可接受的寄生运动的大小和可用的构造空间是该机构的最终尺寸的边界条件。
对于小的偏转角度ϕ,寄生运动通常比主运动小一个数量级。因此,平行四边形和梯形机构适用于小冲程。弯曲接头也适用于这些机制,因为它们的最佳工作范围同样适用于小的变形。与滚动和滑动阶段相比,弯曲关节的运动在纳米尺度上是可重复的。柔性纤维接头的新设计具有必要的负载能力和纵向刚度。
- 平面三轴导向机构
通过适当的支板布置,可以将平行四边形和梯形的布置组合在一起,从而在联合坐标系下引导和驱动三种可能的笛卡尔运动。双连接的支柱具有两种功能,既可以作为静态支柱,也可以作为驱动器,如果他们的长度被修改。在图8a中,平面三轴机构位于其中间位置。可能的动作如下:
Z方向的平移(图8b):支柱Sy和Sxx相互平行。它们就像一个平行四边形,引导z方向的平移。该机构是通过修改支柱Sz的长度来驱动的,Y方向的平移(图8c):如果支柱Sy和Sxx修改相同距离,将产生y方向的平移。在这种情况下,支柱Sz可以像平行四边形的支柱一样作为指导,绕着X旋转(图。支柱Sy和Sz的作用线在该机构的零度位置与R点相交。围绕X的旋转将由Sxx长度的修改来驱动。位移ϕx的角度由Sxx的长度和杠杆r的长度的变化决定。
- 例如:在六个笛卡尔轴上定位一面镜子
该新机构是由上述[11]所述的三个平面三轴机构组合而成,即每个笛卡尔平面一个图8a机构。平面机构是正交排列的,使每一个单一的机构位于笛卡尔坐标系的一个原点平面。每个杆Sx, Sy和Sz与直角坐标坐标系统的X, Y和z轴之一重合。因此支柱Sx、Sy和Sz定义了运动坐标系的原点(图9)。三个平面子机构相互渗透,使得支柱Sx、Sy和Sz作用于两个相邻的平面子机构中。
在支撑和移动镜子的机构中,支柱通常被布置成这样,使坐标系的原点位于反射面的中点。在这种布局中,对于小的运动,三个旋转围绕着入射光束的足迹的中点被引导,并且三个平移沿着这些轴被引导。在图9b-d中,该机构以平行于运动平面的投影表示。每个投影视图显示一个平行四边形和一个梯形排列,如图8所示。
-
- 笛卡尔运动的驱动器(图10)
绕着X的方向旋转:通过驾驶SXX。
绕Y旋转:驾驶SYY。
在零位置的笛卡尔运动的支柱排列的第三个角投影。六个支柱的长度可移动,以驱动机构。根据每个支柱的驱动方向,它们标记有Sx、Sxx、Sy、Syy、Sz和Szz。
图中零位置所示的机制的六个笛卡尔运动。图9,对于三种可能的平移(上行)和围绕镜面中点的三个旋转(下行)。
图11.X方向的平移(第三角投影)以及f和∆l的相应定义(参见文本)。
图 12.围绕X旋转(第三角投影),定义为a、b、c、f、l和xi;
- 绕着Z的方向旋转:通过驾驶SZZ。
- 翻译在X:通过驱动SX和SYY在相同的距离
- Y;驾驶SY、SXX、SZZ相同距离。
- 翻译;驾驶SZ
支柱可以有一个小的横向偏移,以完成设计的实际要求。这些偏离所描述的理想拓扑的偏差只导致非常小的附加误差运动,这是可重复的,并且可以计算出来。
-
运动的分辨率和精度的计算
- 在X方向上的平移
在图11中,显示了一个在x方向上的平移的例子。如果支柱SX和SYY修改相同距离,平台将向X方向移动(图11)。距离∆lx和∆lyy直接提供了平台的主要行程。支柱SXX、SY和SZZ的倾斜偏差导致平台向y方向的寄生虫移动。位移可以通过主运动fx和支柱长度计算:SZ的倾斜偏差导致了在z方向上的寄生运动。它的位移可以用主轴运动、fx和Sz的长度来计算,仔细观察可以发现,由于Sz在y方向上的倾斜偏移,y方向上的寄生运动引起了z方向上新的寄生运动。此外,z方向的寄生运动通过SXX、SY和SZZ在z方向上的倾斜偏移引起了y方向上的二次寄生运动。这些二阶寄生运动比一阶因果寄生运动小得多。它们可以用毕达哥拉斯定理从一阶寄生运动中计算出来。
拆卸下顶部法兰的开关镜系统。根据笛卡尔支柱的拓扑结构,UHV-容器包含两个具有独立排列结构的镜子。
图 14.查看到开关镜像单元。该机械结构部分被冷却管道、电缆和弹簧所隐藏。
如果支柱已经因先前的运动而倾斜,则目前的寄生运动计算需要通过计算零位置的整个运动距离或添加它们的代数符号来刷新。如果平行支柱SY、SXX和SZZ以及对SX和SYY的长度不完全相等,则在平移上叠加一个旋转。如果平行的支柱有完全相同的长度,所有的运动都是纯平移。所给出的公式描述了其几何关系,应用于关节、支柱和驱动器上的力可以以类似的方式计算。
-
- X周围的旋转
围绕X的旋转将通过修改支柱SXX的长度来驱动(图12) 运动角xi;可以用方程计算。
发生了两种寄生运动:
- 镜子在(1)方向移动,因为支柱SZ和镜子的倾斜偏差。由此产生的运动可以从
当SX保持其正交方向时,支撑杆SYY的倾斜偏移导致镜面绕y轴旋转。支撑杆SYY的镜面处的关节沿Y和z方向移动距离。因此,支柱关节在镜处的平移是SYY方向的,利用支柱到旋转轴的距离aZ,可以计算出寄生旋转f
二阶寄生运动是由由于第一寄生运动导致的支柱SX和SYY在SYY方向上的斜移引起的镜像在SYY方向上的平移。此外,围绕Y的寄生旋转产生了SX在Z方向的倾斜偏差,从而以及在X方向的平移和SZ在X方向的倾斜偏差,从而产生了z方向的平移。支柱的长度的选择通常是为了保持整个行程的寄生运动至少比主运动小一个数量级。对于短距离,寄生运动低于1%。因此,简单的补偿运动是可能的。新的支杆拓扑的其他四个笛卡尔运动可以用同样的方法导出。这里没有详细描述。未来设计的分辨率和精度的计算可以用与本文类似的方法进行。
图 16.平台绕X大旋转470弧秒(25000步)(a),及其在X方向(b)、Y方向(c)、Z方向(d)和围绕Y轴(e)和Z轴(f)的五个寄生运动。
- 申请样本
这里描述的使用笛卡尔支柱拓扑的系统用于贝西的光束线。尺寸为40mmtimes;40mm40mmtimes;250mm~100mmtimes;100mmtimes;1000mm,相应重量为200g~12kg的镜子需要高精度定位。整个系统的基础面积约为1mtimes;1m,高度为1.6m。一个典型的光机系统如图13所示。真空容器是开放的,力学是可见的。光从右边发出,从左边离开真空室。可见法兰是盲法兰,用于诊断、冷却和开孔。下框架是由不锈钢和对角线,以确保设置非常高的刚度。
图14所示为近景。视野主要由镜子的冷却管控制。它们是必要的,因为同步加速器的热负荷很高。两面镜子在房间的中间区域。它们有独立的校准和支撑结构,安装在一个平行四边形上,可以进行45毫米的平移,以交替地将反射镜切换到光束中。反射镜的入射角在2 -4◦的范围内。线性驱动器安装在真空容器的空气侧,线性运动通过波纹管和刚性轴通过真空壁。支板、反射镜等机械部件均处于超高真空状态。
图 17.在X方向(a)上的1.6mm的长平移,以及它在Y方向(b)和Z方向(c)上的5个寄生运动,以
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[590074],资料为PDF文档或Word文档,PDF文档可免费转换为Word
您可能感兴趣的文章
- 饮用水微生物群:一个全面的时空研究,以监测巴黎供水系统的水质外文翻译资料
- 步进电机控制和摩擦模型对复杂机械系统精确定位的影响外文翻译资料
- 具有温湿度控制的开式阴极PEM燃料电池性能的提升外文翻译资料
- 警报定时系统对驾驶员行为的影响:调查驾驶员信任的差异以及根据警报定时对警报的响应外文翻译资料
- 门禁系统的零知识认证解决方案外文翻译资料
- 车辆废气及室外环境中悬浮微粒中有机磷的含量—-个案研究外文翻译资料
- ZigBee协议对城市风力涡轮机的无线监控: 支持应用软件和传感器模块外文翻译资料
- ZigBee系统在医疗保健中提供位置信息和传感器数据传输的方案外文翻译资料
- 基于PLC的模糊控制器在污水处理系统中的应用外文翻译资料
- 光伏并联最大功率点跟踪系统独立应用程序外文翻译资料


