
英语原文共 10 页,剩余内容已隐藏,支付完成后下载完整资料
光伏发电系统最大功率跟踪技术的比较研究
Bidyadhar Subudhi(IEEE协会高级会员)、Raseswari Pradhan
摘要:本文提供了截止到2012年1月的应用于光伏(PV)发电系统的最大功率点跟踪技术(MPPT)的全面审查。很多出版物刊登了应用于PV发电系统的不同的MPPT技术的实现。但是,选择MPPT技术时会产生混淆,因为每种技术都有自己的优点和缺点。因此,对这些技术的适当审查是十分有必要的。不幸的是除了关于MPPT的两个最新评论([Salas et al., 2006], [Esram and Chapman, 2007]),人们在这方面做了很少的尝试。由于MPPT是PV系统的重要部分,近年来在该领域中已经出现了广泛的研究,并且自那时以来已经将许多新技术添加了进来。在本文中,做出了MPPT技术的详细描述和随后的分类基于诸如所涉及的控制变量的数量,采用的控制策略的类型,适用于PV系统的电路类型和实际/商业应用的特征。本文旨在为未来将MPPT应用于PV系统中的用户提供方便的参考。
索引术语 - 最大功率点跟踪(MPPT)技术,光伏(PV)阵列。
- 介绍
由于电力需求的增长,有限的库存和常规来源(如煤炭和石油等)的价格上涨,光伏(PV)能源成为了一个有前途的选择,因为它是无处不在的、免费提供的、环境友好的、并且可以减少运行和维护成本[1],对于独立和并网模式的光伏系统,光伏发电系统的需求似乎都在增加。因此,有效的最大功率点跟踪(MPPT)技术是必要的,其期望在所有环境条件下跟踪最大功率点(PPT),然后迫使光伏系统在该MPP点操作。最大功率点跟踪技术是光伏系统的重要组成部分。在文献[2] - [62]中报道了几种MPPT技术及其实现。在为特定应用选择MPPT技术时,用户总是感到困惑。不幸的是,直到2007年,在这一领域只有几篇论文[2],[3],包括关于MPPT技术的讨论。但是自那时以来已经报道了许多新的MPPT技术,例如分布式MPPT、高斯 - 牛顿技术、自适应扰动和观测、估计扰动和扰动以及基于自适应模糊和粒子群优化(PSO)的MPPT等。 因此,有必要准备一份审查,其中包括2007年之前和之后直到2012年提出的所有高效和有效的MPPT技术。
在该评论中,还尝试基于它们的优点、缺点、涉及的控制变量、电路类型、算法的复杂性、硬件实现的复杂性水平以及科学和商业应用的类型来比较MPPT技术。
本文尝试对大多数报告的MPPT技术进行比较审查,排除由于篇幅限制而无意中遗漏的论文。
本文结构如下:在第二部分的MPPT技术是摘录自一篇直到2012年才被讨论的关于MPPT的大量文献调查,这些都在第三部分进行了比较,第四部分分析了MPPT的效率,结束语见第五部分。
二.关于MPPT技术
以下技术是广泛应用于诸如空间卫星,太阳能车辆和太阳能水泵等各种PV应用的一些MPPT技术。
- 曲线拟合技术
MPP是PV面板的特性的极值,因此首先在该技术中预测PV面板的特性。为了预测这种特性,PV面板可以基于数学方程或数值近似离线建模[4],[5]。为了实现准确的P-V曲线拟合,三阶多项式函数:
(1)
其中系数a,b,c和d通过对PV电压和功率进行采样来确定。有公式(1)可以得出:
(2)
在最大功率点时, (3)
因此,MPP处的电压可以计算为 (4)
在该技术中,使用在[5]中定义的数学方程式,在几毫秒的跨度中重复采样a,b,c和d,然后计算。
- 分数短路电流(FSCI)技术
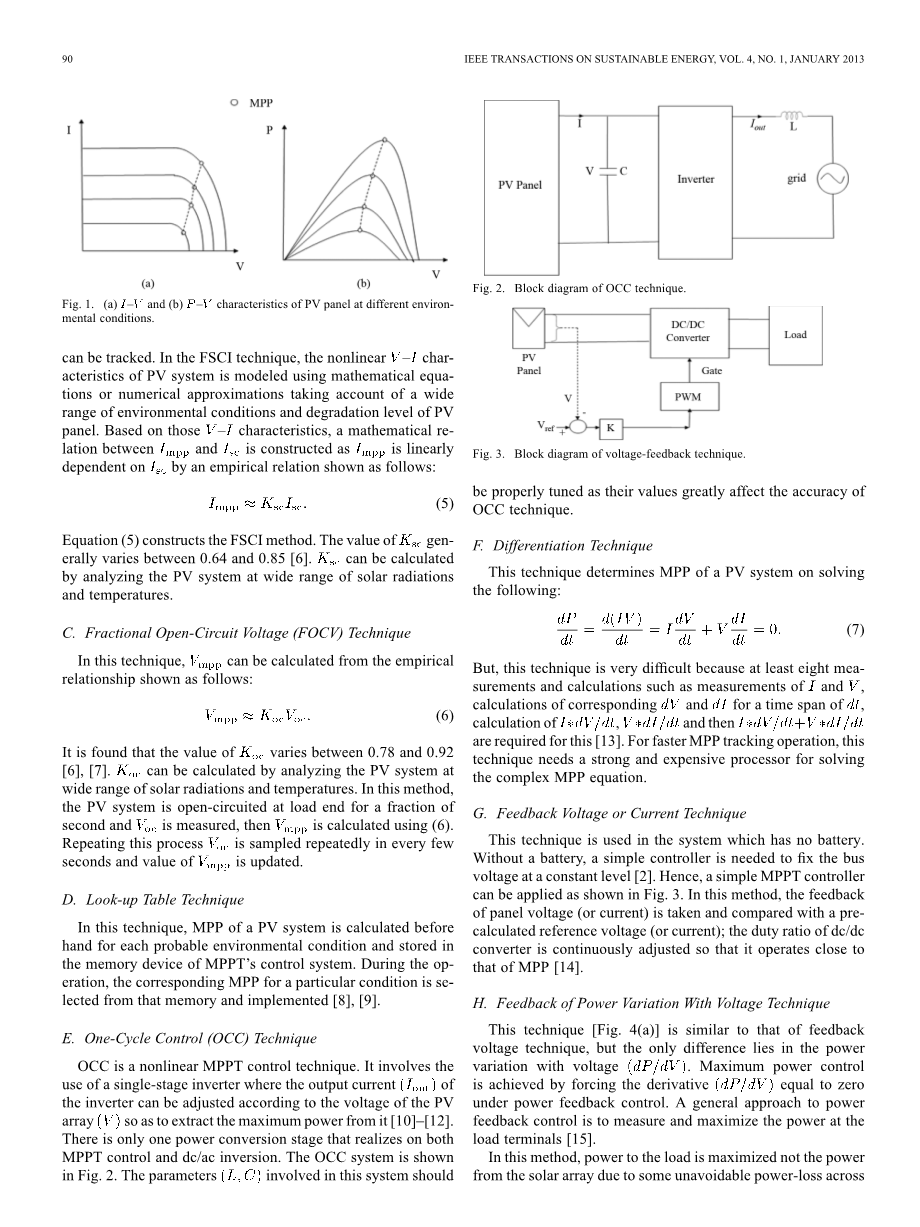
在图一中存在称为MPP的单个操作点P,在该操作点处,在给定环境条件下面板的功率最大,如果通过某种方式,跟踪最大功率点电压或最大功率点电流中的任何一个,则可以跟踪相应的最大功率。在FSCI技术中,PV系统的非线性V-I特性考虑到广泛的环境条件和PV面板的退化水平,使用数学方程或数值近似来建模。基于这些V-I特性,如通过如下所示的关系,和之间的数学关系被构造为线性地依赖于:
方程(5)就是FSCI方法。的值通常在0.64和0.85之间变化[6]。的值可以通过在大范围的太阳辐射和温度下分析PV系统来计算。
- 分数开路电压(FOCV)技术
在这种技术中,可以从如下所示的经验关系中计算:
的值在0.78和0.92之间变化[6],[7]。可以通过在大范围的太阳辐射和温度下分析PV系统来计算。在该方法中,PV系统在负载端开路一秒钟,测量,然后使用公式(6)计算。重复该过程每几秒钟重复采样,并且更新的值。
- 查表技术
在该技术中,针对每个可能的环境条件提前计算PV系统的MPP并且存储在MPPT的控制系统的存储器装置中。在操作期间,根据特定的条件从该存储器中选择相应MPP,然后进行操作 [8],[9]。
- 单循环控制(OCC)技术
OCC是一种非线性MPPT控制技术。它涉及到使用单级逆变器,其中逆变器的输出电流()可以根据PV阵列的电压(V)进行调整,以便从中取得最大功率[10] - [12]。其中只有一个功率转换级在MPPT控制和dc / ac变换器上实现。OCC系统如图2所示。 该系统中涉及的参数(L, C)应该被适当调整,因为它们的值极大地影响OCC技术的准确性。
- 分化技术
该技术用于在解决以下问题时确定PV系统的MPP:
但是,这种技术实施起来是十分困难的,因为它要求必须进行至少八个数值的测量和计算,例如电流I和电压V的测量、电压V和电流I在时间常数t上的微分的计算、和的计算以及[13]。对于更快的MPP跟踪操作,这种技术需要强大和昂贵的处理器来解决复杂的MPP方程。
- 反馈电压或电流技术
该技术用于没有电池的系统中。由于没有电池,需要一个简单的控制器将总线电压固定在一个恒定的水平[2]。因此,可以使用如图3所示的较简单的MPPT控制器。该方法首先获取面板电压(或电流)的反馈,并与预先计算的参考电压(或电流)进行比较;DC / DC转换器的占空比通过连续调整,使其工作接近MPP [14]。
- 电压变化与电压技术的反馈
这种技术[如图4(a)]类似于反馈电压技术,但唯一的区别在于功率随电压的变化()。通过在功率反馈控制迫使微分()等于零来实现最大功率控制。功率反馈控制的一般方法是测量和最大化负载端子处的功率[15]。
在该方法中,由于转换器上的一些不可避免的功率损耗,对负载的功率不是最大的太阳能电池阵列的功率。因此,高性能转换器的设计是该技术中关注的问题[16]。
- 利用当前技术实现功率变化的反馈
该技术(如图4b)除了在功率变化与电流反馈()之间的差异,是类似于技术的,因为微分值()在MPP处也等于零。因此,它会调整占空比,直到在MPP处为零[17]。
- 扰动和观测(P&O)以及爬山技术
在该技术中,首先测量PV电压和电流,并且由此计算相应的功率。考虑到电压的小扰动或dc / dc转换器在一个方向上的占空比的扰动,计算对应的功率。然后将这样,峰值功率点被识别,因此可以计算相应的电压[18] - [20]。P&O /爬山的主要缺点是在大气快速变化(例如破云)的情况下偶尔会偏离最大工作点。此外,正确的扰动大小对于在动态和稳态响应中提供良好的性能是重要的[21]。为了解决这个问题,可以使用具有可变扰动步长的自适应爬坡技术(图5)[22],其中当功率主要由于环境变化而在较大范围内变化时,自动调谐控制器将扰动步长改变为较大值,以满足瞬变阶段期间的快速响应要求。此外,控制器以这样的方式制定,即当功率变化小于或等于设定的最低限度时,控制器假设系统进入稳定状态,并且将扰动值变小。在类似的文章中,引入了一种自适应P&O技术[23]和另一种能预测和自适应的MPPT P&O技术[24]。在自适应P&O方法中,而不是在预测和自适应MPPT P&O方法中,采取了随着从PV面板提取的功率的增加而线性减小的恒定占空比扰动。
- 增量电导(Inc-Cond)技术
对于光伏系统,面板输出功率与其电压的导数表示为:
参考公式(3),公式(8)的解在MPP处为零,在MPP的左边为正,并且在MPP的右边为负。 因此,公式(8)可以重写为:
因此,MPP可以通过比较瞬时电导与电导的增量来进行跟踪[25],[26]。它与P&O具有相同的效率,在快速变化的大气条件下具有良好的产率。这里,也存在与P&O存在的相同的扰动大小问题,并且已经通过采取可变步长来解决[27]。但是,它需要复杂和昂贵的控制电路。
- 强制振荡技术
该技术基于将小信号正弦波扰动注入到开关频率中并且比较交流分量和面板端子电压的平均值,如图6所示。这时开关频率改变并且感测(输入电压)。缩小,并将进行比较,转换器的职责就是设置占空比使其达到最大功率点。
- 波纹相关控制(RCC)技术
当PV阵列连接到功率转换器时,转换器的开关动作在PV阵列上施加电压和电流纹波。这使得PV系统的发电功率受到影响。在RCC技术[29]中,该波纹被PV系统用于执行MPPT。 由于波纹通过使用开关转换器自然可用,因此不需要人为扰动。RCC将dp / dt与di / dt或dv / dt相关联,因此使用公式(10.1)和(10.2)来识别PV系统的电压和电流的值是否大于或小于MPP的值。RCC的作用是迫使该纹波为零,并最终将PV面板电压和电流拖曳到MPP的电压和电流。RCC适用于任何开关功率转换器拓扑。这种调节可以通过使用升压转换器来完成。 这里,电感器电流等于阵列电流。在给定的温度和辐照度下,IL与P = VIL一起调节。当环境条件有任何变化时,MPP也被移动。 然后参考图7,(10.1) - (10.2)可以修改如下:调节占空比,可以调节IL的值。 d的值可以使用以下公式计算:
- 即时扫描技术
电流扫描[30]技术使用扫描波形用于PV阵列电流,使得PV阵列的特性以恒定的时间间隔获得和更新。然后可以以相同的间隔从特性曲线计算Vmpp。为电流扫描波形选择的函数与其导数成正比。可以使用(14)计算i(t),随后使用(16)计算Vmpp。 这里,参考点在固定的时间间隔中频繁更新,因此如果适当地选择比例系数k1和k2,则该技术产生准确的结果。
- 估计 - 扰动(EPP)技术
EPP技术是扩展的P&O方法。 该技术在两个扰动模式之间具有一个估计模式。 扰动过程在高度非线性PV特性上进行搜索,并且估计过程补偿辐照度改变条件的扰动过程。 该技术复杂,但其跟踪速度比P&O方法更快,更准确[31]。
- 寄生电容技术
寄生电容技术[3],[32],[33]类似于Inc-Con技术,但是差异在于它要考虑PV电池的寄生结电容Cp的效应,其由电荷 存储在PV电池的pn结中。这种电容效应可以通过在PV面板模型方程中将通过电容的电流加上i(t)= Cp dV / dt来确认,如下:
对于由转换器产生的ac纹波分量考虑阵列电压的一阶和二阶导数。 阵列电导是瞬时阵列电流与瞬时阵列电压的比,计算如下[33]:
其中Pgp是平均波纹功率,Vo是电压纹波的大小。 Pgp和(Vo)^ 2的值可以从电路配置(图8)获得。电路的输入是测量的PV阵列电流和电压。 高通(HP)滤波器去除V的直流分量。两个乘法器产生Vo ^ 2和Pgp的ac信号,然后由低通滤波器(LP)滤波,留下Vo的直流分量 ^ 2和Pgp。
- 负载电流/负载电压最大化技术
如果直接连接到负载,即使对于恒定负载,也不能确保MPP处的PV阵列的操作。 因此,不能使用将负载接口到PV阵列的可调谐匹配网络来实现MPP处的操作。 MPPT电路的主要组件是其功率级和控制器(图9)。 由于功率级通过开关模式功率转换器实现,控制输入是占空比[34]。
- DC链路电容器下垂控制技术
DC链路电容器下垂控制技术[2],[33]被设计为与与交流系统线路并联连接的PV系统工作。 理想升压转换器的占空比(D)表示为:
其中v是PV阵列上的电压,Vlink是dc链路两端的电压。 如果Vlink保持恒定,则可以通过增加在逆变器中流动的电流来增加从转换器输出的功率。当电流增加时,只要逆变器所需的功率不超过 从PV阵列可获得的最大功率。如果不是这样,Vlink开始下垂。 在下降点之前,逆变器的电流控制命令处于其最大值,并且PV阵列在MPP处操作。 交流系统线路电流反馈到DC链路以防止Vlink下降,并被优化以实现MPPT,如图10所示。 该技术仅限于与交流系统线路并联连接的PV系统。
- 基于线性化的MPPT技术
光伏模块和转换器都表现出非线性和时变特性,这使得MPPT设计变得困难。 在这种方法中,连续线性化将非线性问题简化为线性情况。 使用一组线性方程[36]来估计PV模块的MPP,利用MPP轨迹处的模块电压和电流值之间存在的关系。 PV面板模型的分析研究表明,由于PV面
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[139731],资料为PDF文档或Word文档,PDF文档可免费转换为Word
您可能感兴趣的文章
- 饮用水微生物群:一个全面的时空研究,以监测巴黎供水系统的水质外文翻译资料
- 步进电机控制和摩擦模型对复杂机械系统精确定位的影响外文翻译资料
- 具有温湿度控制的开式阴极PEM燃料电池性能的提升外文翻译资料
- 警报定时系统对驾驶员行为的影响:调查驾驶员信任的差异以及根据警报定时对警报的响应外文翻译资料
- 门禁系统的零知识认证解决方案外文翻译资料
- 车辆废气及室外环境中悬浮微粒中有机磷的含量—-个案研究外文翻译资料
- ZigBee协议对城市风力涡轮机的无线监控: 支持应用软件和传感器模块外文翻译资料
- ZigBee系统在医疗保健中提供位置信息和传感器数据传输的方案外文翻译资料
- 基于PLC的模糊控制器在污水处理系统中的应用外文翻译资料
- 光伏并联最大功率点跟踪系统独立应用程序外文翻译资料


