
英语原文共 9 页,剩余内容已隐藏,支付完成后下载完整资料
声音与振动杂志309 (2008) 868–876
简讯
结合动态刚度矩阵和精确的时间积分方法进行梁的瞬态强迫振动响应分析
Bin Tang
内燃机研究所,大连理工大学,大连116023,中华人民共和国
于2007年2月25日收到;于2007年7月16日收到修改稿;2007年7月21日接受
2007年9月25日上线
摘要
已经建立了一种确定梁的瞬态响应的方法。将梁划分为几个连续的铁木辛柯梁单元。依次组集单元的动态刚度矩阵得到整体的动态刚度矩阵。利用Leung方程,我们推导出比整体动态刚度矩阵更适合响应分析的整体质量矩阵和整体刚度矩阵。利用精确的时间积分法计算梁的受迫振动。通过讨论三个有代表性的梁的例子来评估当前方法的性能。有限单元法计算出的解和理论分析得到的解也被列举出来用于比较。在这些例子中,我们已经发现了当前的方法可以以更高的精度求解结构的强迫振动。
2007爱思唯尔有限公司保留所有权利。
引言
动态刚度法可以被看作是一个改进的动态传递矩阵法和有限元法(FEM)。它包括频率相关的形状函数,频率相关的形状函数由控制微分方程的解得到。动态刚度法也有有限元法的优点,有限元法比传递矩阵法更适合与求解复杂的问题。动态刚度法是1940年代由Kolousek[1]建立起来的,他利用精确的位移法推导了Bernoulli–Euler梁的动态刚度矩阵。自那时以来,许多学者都开始提到连续单元和动态刚度矩阵。Akesson回顾1976年之前的研究。Leung [3]讨论了最近的进展。为了求解结构的动态响应, 对于许多简单边界条件模态分析方法通常被用作理论分析方法。Akesson[2],Leung[3],陈等[4],Hong 和Kim [5],刘等[6,7]使用模态分析方法和动态刚度方法求解了多种结构的受迫瞬态响应分析问题。
在本文中,将动态刚度矩阵和精确的时间积分法结合使用来分析梁的受迫振动。该方法可以推广用于求解未来复杂结构的瞬态响应。推导了铁木辛柯梁单元弯曲变形的动态传递矩阵。使用变换矩阵, 组装得到整体动态刚度矩阵。我们利用Leung方程[8]推导出整体质量矩阵和整体刚度矩阵,整体质量矩阵和整体刚度矩阵与频率无关。然后再用精确的时间积分法推导系统的瞬态响应。最后,三种梁作为数值算例来验证所提出的方法。
术语
:横截面面积
:位移矢量
:杨氏弹性模量
:力矢量
:剪切弹性模量
:相对于轴的惯性矩
:剪切形状因子
:整体刚度矩阵
:整体动态刚度矩阵
:梁的长度
:相对于轴的弯矩
:整体质量矩阵
:方向的剪力
:时间
:坐标变换矩阵
: 在平面的弯曲振动的动态传递矩阵
:在方向的总的挠度
:矩形坐标轴(原点在点)
:相对于轴的弯曲斜率
:单位面积的质量
:泊松比
:单位体积的质量
:圆频率
下标
0:处的状态
:处的状态
2. 铁木辛柯梁弯曲振动的传递矩阵
铁木辛柯梁的控制运动方程是[9]:
式中y是y方向的总挠度。是相对于z轴的弯曲斜率。k是梁的剪切形状因子。是相对于z轴的惯性矩。是单位面积的质量。
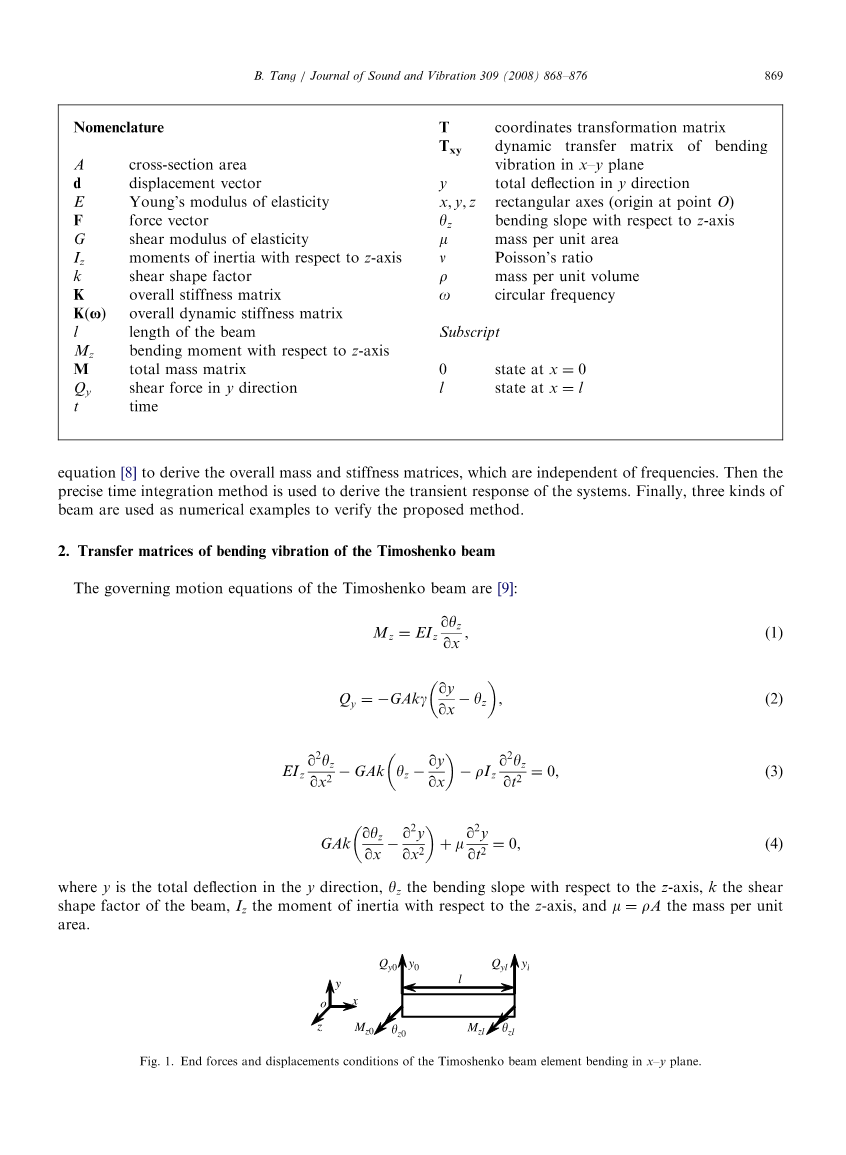
图1 在x - y平面弯曲的铁木辛柯梁单元的力和位移的边界条件
使用分离变量的形式和微分方程理论,我们可以得到的结果。铁木辛柯梁的长度是l, 在x - y平面弯曲的铁木辛柯梁单元的力和位移的边界条件如图1所示。所以,
当
当
使用上述的边界条件,我们可以从的结果获得铁木辛柯梁在x - y平面内弯曲振动的状态向量的关系式
其中
3.连续的铁木辛柯梁单元的动态刚度矩阵
假设铁木辛柯梁单元的位移矢量d和力向量F是:
然后这个梁的动态传递矩阵是
为了获得动态刚度矩阵,引入如下的变换方程[10]:
动态刚度矩阵是
假设从局部坐标系到整体坐标系的转换矩阵为T。使用这个变换矩阵,我们可以将动态刚度矩阵从局部坐标系变换到整体坐标系。然后整体的动态刚度矩阵K(omega;)就能通过组集所有单元的动态刚度矩阵而获得,组集方法和通常的有限元法中的组集方法相同。
4.受迫振动的解析运动方程
基于动态刚度矩阵,有阻尼的受迫振动的运动方程是
K(omega;)是整体动态刚度矩阵,C是阻尼矩阵,q是广义位移向量,且Q(t)是广义力向量。
1977年,Richards and Leung 给出了如下的方程[8]:
因为总体刚度矩阵K(omega;)已经组装得到, 可以在实际的计算中采用方程(13)的数值微分[11]。我们可以获得
其中是一个很小的数。
使用整体质量矩阵和整体刚度矩阵在上,我们可以将Eq(12)变换为
式中M ,C, K分别是整体质量、整体阻尼和整体刚度矩阵。
5. 精确的时间积分法
精确的时间积分法是一个高度精确的方法。这个方法不仅能给出精确的数值结果,而且还是一个显式的积分方法和无条件稳定的[12]。假设
方程(15)中的二阶微分可以转化为一阶微分的形式
其中
传统的梁是一个线性定常系统。考虑到双重方程(17),我们可以得到它的通解:
假定时间步是,那么Eq. (18)就变为
其中,当T将要被算出时,我们应该将时间步划分为 当因为是一个小的时间间隔, 是一个非常小的时间区间[12]。
假定。执行循环
循环之后,我们能得到T:
假设在时间步里,非齐次项是线性的,即
将Eq(22)代入Eq(19)给出了精确的时间积分方程:
6. 数值算例
本节将给出数值结果来论证当前的方法。以三个梁模型作为数值算例来测试当前的算法。在这些例子中,阻尼是被忽视的。第一个例子是一个受阶跃力激励的简单支持梁。第二个例子是一个受正弦力激励的简单支持梁。第三个例子是一个受正弦力激励的阶梯形梁。使用一个2.80 GHz的英特尔奔腾4处理器和248 mb的物理内存的IBM联想桌面机系列A508176-KCB。操作系统是Microsoft Windows XP SP2。
6.1. 在阶跃力载荷作用下简单支持梁
图2显示了一个方形截面的简单支持梁。基本的构件性质是长度l=10m,横截面A=0.01 m2,杨氏模量泊松比 ,剪切形状因子 且密度。
作为第一个例子,有一个F(t)=300 N的阶跃外力作用在梁的中间。当用有限元方法来分析梁的瞬态振动时,为了得到高精度的解,至少要采用六个普通的梁单元。采用纽马克时间积分方法,时间步长是0.01秒。
图2 一个简单支持梁的示意图
这个问题的理论公式如[13]:
其中
x和w分别是外力的位置和临界频率。
使用当前的方法时,我们把梁分成两个连续的铁木辛柯梁单元。整体质量矩阵和整体刚度矩阵在基本频率 处得到。使用精确的时间积分方法,我们还可以获得中点的位移。进行求解时采用的时间步长是。图3显示了前10秒内梁的中点的垂向响应。比较表明,三种方法的结果是相似的。当前方法比有限元方法需要更少的单元。与有限元方法相比,当前方法的性能如表1中给出。当前方法的分析时间大约比有限元方法的分析时间快两倍。
6.2. 算例2:一个受正弦力载荷作用的简单支持梁
第二个例子是一个简单支持梁受到一个正弦外力作用在梁的中点,其中。梁的几何尺寸和材料特性与第一个例子的是相同的。这个问题的理论公式是[13]
其中, 参见方程(25)。
使用当前的方法,我们也可以获得在梁的中点的位移。基本参数也和第一个例子的一样。前10秒内梁的中点的垂向响应如图4 所示。结果的比较表明,当前的方法所得的结果与理论结果是重合的,而且比有限元法得到的结果更好。所以当前方法可能适用于求解复杂结构的强迫振动。表2分别显示了当前方法和有限元法的分析时间,当前的方法是比有限元法快两倍。
图3 一个简支梁在中点受到一个阶跃力激励之后中点的垂向响应。有限元方法的解,当前方法的解,和理论解。
表1 算例1的计算时间分析
图4 第二个简支梁在中点受正弦力激励之后中点的垂向响应。有限元方法的解,当前方法的解,和理论解。
表2 算例2的计算时间分析
6.3. 示例3:受到正弦力激励的悬臂阶梯形梁
第三个例子是在一个悬臂阶梯形梁的自由端作用一个正弦外力,其中。梁如图5所示。阶梯形梁的材料性质与第一个例子的类似。每一段都是一个正方形横截面。和分别是第i段的长度和面积(i=1,2,3)。其中有限元法与第一个例子的类似。阶梯形梁被划分为50个梁单元。采用纽马克时间积分方法,时间步长为0.01 s,总的计算时间是10秒。
使用当前的方法,我们将阶梯形梁划分为三个连续的铁木辛柯梁单元。在总计算时间(10s)内的前6 s时间内梁的自由端垂向响应如图6所示。图6显示了当前方法所得的结果和有限元法所得的结果。为了说明图6中结果的差异,我们使用FFT方法来分析时域响应。频域响应如图7所示。第一个幅值是强迫振动响应。第二个幅值和第三个幅值分别是由当前方法计算得到的自由振动响应和有限元法计算得到的自由振动响应,它们分别为10.83984和11.23047 Hz。当前方法计算得到的自由振动频率比有限元法计算得到的自由振动频率更准确。表3显示了每种方法的计算时间。当前方法仍快于有限元方法。
图5 悬臂阶梯形梁的草图
图6 悬臂阶梯形梁的自由端受一个正弦力作用后自由端在时域内的垂向(y)响应:有限元方法的解,和当前方法的解。
图7 悬臂阶梯形梁的自由端受一个正弦力作用后自由端在频域内的垂向(y)响应:有限元方法的解,和当前方法的解。
表3 算例3的计算时间分析
7. 结论
在本文中,基于动态刚度矩阵和精确的时间积分法,对梁的动态响应进行了分析。该方法结合了动态刚度矩阵和精确的时间积分法的优点。具有两种不同边界条件的简支梁和具有一种边界条件的阶梯形梁被用作为算例。计算和比较证明了这一方法可以有效地用于梁的强迫振动分析。
参考文献
[1] V. Kolousek,Dynamics in Engineering Structures, Butterworths, London, 1973.
[2] B.A. Akesson, PFVIBAT—a computer program for plane frame vibration analysis by an exact method, International Journal for Numerical Methods in Engineering10 (1976) 1221–1231.
[3] A.Y.T. Leung, Dynamic Stiffness and Substructures, Springer, London, 1993.
[4] S. Chen, M. Greadin, E. Lamine, An improved dynamic stiffness method and modal analysis for beam-like structures, Computers amp; Structures60 (1996) 725–731.
[5] S.W. Hong, J.W. Kim, Modal analysis of multi-span Timoshenko beams connected or supported by resilient joints with damping, Journal of Sound and Vibration227 (1999) 787–806.
[6] T.S. Liu, J.C. Lin, Forced vibration of flexible body systems: a dynamic stiffness method, Journal o
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[150017],资料为PDF文档或Word文档,PDF文档可免费转换为Word
您可能感兴趣的文章
- 饮用水微生物群:一个全面的时空研究,以监测巴黎供水系统的水质外文翻译资料
- 步进电机控制和摩擦模型对复杂机械系统精确定位的影响外文翻译资料
- 具有温湿度控制的开式阴极PEM燃料电池性能的提升外文翻译资料
- 警报定时系统对驾驶员行为的影响:调查驾驶员信任的差异以及根据警报定时对警报的响应外文翻译资料
- 门禁系统的零知识认证解决方案外文翻译资料
- 车辆废气及室外环境中悬浮微粒中有机磷的含量—-个案研究外文翻译资料
- ZigBee协议对城市风力涡轮机的无线监控: 支持应用软件和传感器模块外文翻译资料
- ZigBee系统在医疗保健中提供位置信息和传感器数据传输的方案外文翻译资料
- 基于PLC的模糊控制器在污水处理系统中的应用外文翻译资料
- 光伏并联最大功率点跟踪系统独立应用程序外文翻译资料


