英语原文共 22 页,剩余内容已隐藏,支付完成后下载完整资料
基于智能手机的稳健的和普适的车道检测
Heba Aly,Anas Basalamah,Moustafa Youssef
摘要
车道级定位被几种基于位置的服务所需要,如高级辅助驾驶系统,无人车,预测驾驶员意图系统,许多其他新兴应用等。然而,现在的室外定位技术不能提供所需的精度去估计汽车的所在车道。
在这篇文章中,我们提出了LaneQuest系统:一个精确的节能的基于智能手机的车道检测系统。LaneQuest利用现成的作为商品的智能手机中普遍存在的和低功耗的惯性传感器中关于汽车运动和其周围环境的信息去提供一个关于汽车当前车道位置的准确估计。例如,一辆车掉头,很有可能在最左边的车道;一辆车通过一个坑洼将会在有坑洼的车道;当驾驶通过一个弯道时汽车的角速度会反映出其车道。我们的调查表明在环境中有充足的机会,也就是车道的“锚点”,可以提供关于汽车车道的线索。为了处理位置模糊、传感器噪声和模糊的车道锚点,LaneQuest采用了一个新颖的车道概率估计算法,而且它使用一种无监督的众包方法去了解不同车道级锚点的位置和车道跨度分布。
我们的评估结果来自在不同安卓设备上的执行情况和在不同城市覆盖260km的行驶轨迹,它们表明LaneQuest可以以超过91%的平均精度和记起率检测不同车道级的标志。这导致在84%的时间内可以准确地检测确切的车道位置,在一个车道内可以增加到92%的时间(检测准确)。这个足迹需求的能量很低,因此能在能量受限的移动设备上实现LaneQuest。
1.介绍
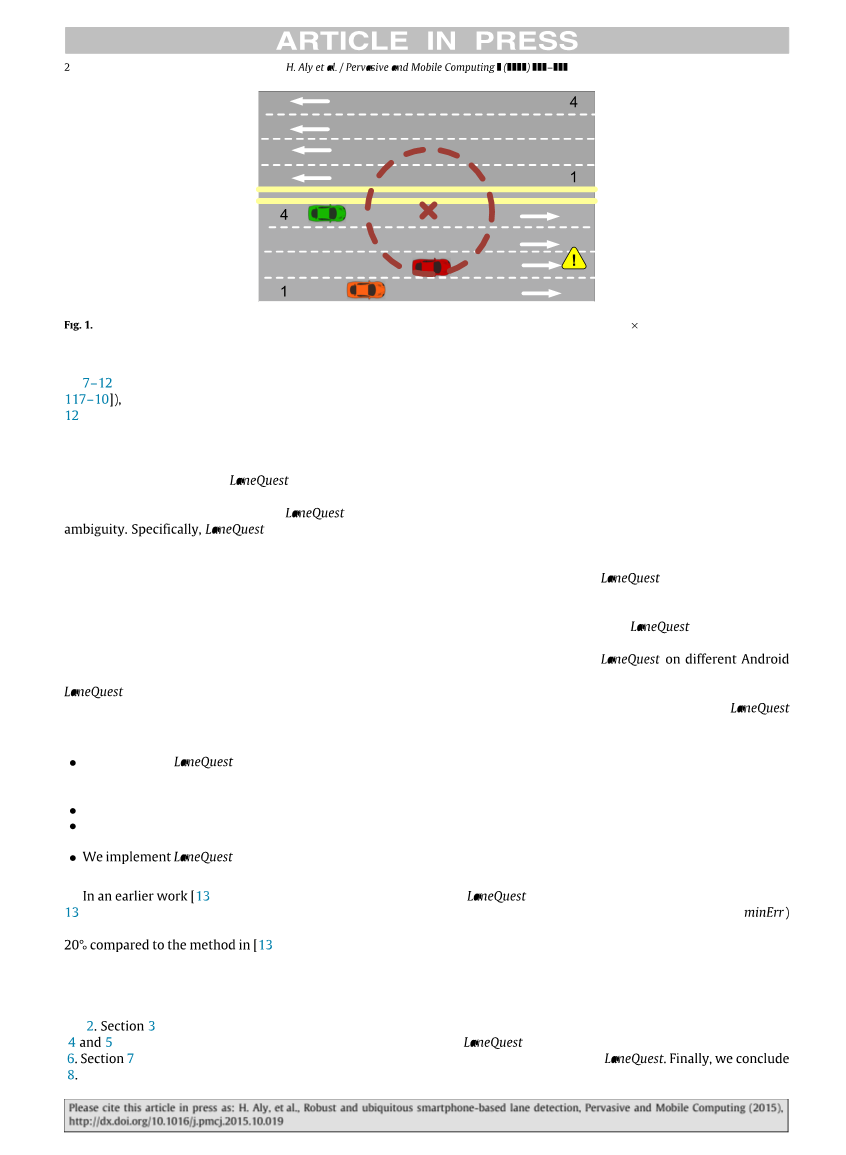
最近,已经有越来越多的基于位置的服务需要汽车车道的位置信息,包括高级驾驶辅助系统,全自动汽车(例如谷歌无人车),基于车道的交通预测,电子收费系统,预测驾驶员意图和其他的一些服务。然而,现在最先进的室外车辆导航系统在城市环境里只能提供大约10m的精度。因此,它们不能提供一个对车辆确切车道的估计(图1)。
图1 当前的室外定位技术不能提供足够的精度去估计汽车车道的位置。rsquo;xrsquo;标记表示GPS的位置,圈则表示相关的错误。当这辆红色的汽车在第2条车道上行驶,约3m的误差使它的车道估计为第4条车道。
许多系统被提出去提供车道级的定位精度。然而,这些系统需要在所有的车上去安装专门的传感器(例如射频传感器),这些限制了它们的普及。也有基于计算机视觉技术的,例如使用摄像头去检测车道标志。然而,当路面标志是模糊的,视线是受阻的或者是处在糟糕天气的情况下(例如下雨),用图像处理的方法则增加了准确性的挑战。它也需要智能手机中大量的能量和处理能力。
在这篇文章中,我们提出了LaneQuest,一个依靠商用智能手机中丰富的传感器去提供一个关于汽车当前车道准确的估计。从一个模糊的粗略的位置估计开始,例如由GPS提供的,LaneQuest依靠由手机传感器检测的驾驶信息去减少这种模糊性。尤其是LaneQuest使用了低能耗的惯性传感器来测量从而识别驾驶过程中独特的运动信息,比如变道,右转或者是通过一个坑洼。这些信息或者“车道锚点”提供了关于车辆当前车道的线索。例如,一辆正在左转的汽车最有可能在最左边的车道。类似的,隧道的跨度通常只有一个车道,让通过它们的车辆去检测这个车道。LaneQuest使用一个众包的方法通过道路网络和它们跨越的车道去检测很多种类的车道锚点以及它们的位置,并利用它们去降低车道估计中的模糊性。
为了解决传感器的噪音,定位模糊和错误的锚点位置估计,LaneQuest把车道检测问题描述为一个在统一的概率框架下结合了车辆移动情况(例如变道)和车道锚点检测的马尔可夫定位问题。我们已经在不同的安卓设备上应用了LaneQuest,并通过在不同城市覆盖超过260km的驾驶实验去评估它。我们的结果表明LaneQuest可以分别以93%的平均精度和91%的记起率去检测不同的车道锚点。这导致84%的时间内可以准确地检测汽车车道,在一个车道内可以增加到92%的时间(检测准确)。此外,当在不同顶尖的定位技术中实现时,LaneQuest有一个低能耗的特点。
总之,我们的主要工作如下:
- 我们呈现了LaneQuest的结构:一个节能的基于众包感知的系统,它依靠车辆移动过程中感知到的车道锚点去提供一个关于车辆当前车道准确的估计,而不需要任何关于它起始位置的事先假设。
- 我们提出了车辆驾驶车道位置检测的统一概率框架的细节。
- 我们提出了一个众包的方法通过不同种类的车道锚点去检测道路和车道位置。这个所提出的技术可以降低众包感知过程中固有的模糊。
- 我们把LaneQuest安装在不同的安卓手机上,并且在不同的城市用不同的智能手机去评估它的表现和能量效率。
在早期的工作中,我们提出了一个本文呈现的LaneQuest系统的初级版本。然而,在这篇文章中,我们显著地扩展了之前的工作。特别是我们提出了一个新的车道估计算法(minErr)去提供更稳健的和准确的估计。该方法与之前的方法比较提高了车道估计准确度的幅度超过了20%。此外,它显著地减少了在瞬态期间发生的错误。我们还新添加了一个曲率估计算法,这个新算法适用于不支持陀螺仪传感器的手机,并且使我们的系统能够应付不同的异构设备。此外,我们提出了一个新的车道变换检测算法。该算法与之前的版本比较检测左边和右边车道变换的准确度分别提高了26.8%和7.3%。
本文的其余部分安排如下:我们在第2节讨论相关工作。第3节呈现了系统结构的概况。第4节和第5节给出了LaneQuest系统和事件检测框架的细节。我们在第6节讨论系统的不同方面。第7节是我们对LaneQuest的评价。最后,在第8节我们总结了本文并提出了今后的研究方向。
2.相关工作
在这节中,我们讨论不同车道级定位技术和之前使用惯性传感器去感知不同道路部位或驾驶行为的技术。
2.1 车道判定
现在最先进的定位技术也只能以大约10m的平均精度去提供位置估计,这是不适合车道级定位的。为了克服这个缺点,研究者提出了基于使用专门传感器和(或)智能手机传感器的技术。
2.1.1 特殊传感器技术
为了克服全球导航卫星系统的不准确,调查者提出将它与别的传感器相结合去提供更准确的车道级定位精度。例如,在[8,9]中,作者结合了一个高精度的GNSS(全球导航卫星系统)接收器,一个里程表和一个陀螺仪以及一个描述道路几何形状的增强型数字地图,使用了基于滤波粒子群算法和基于GNSS航位推测的方法去定位用户,并且匹配它与它的车道。相似的,在[10]中,作者结合了L1-GPS设备,摄像头和一个存储了车道标志信息的增强型数字地图,使用地图匹配动态卡尔曼滤波去得到一个准确的用户位置。另外,在[17]中,作者结合光探测测距信号和视觉数据为车载自主导航去检测行驶车道。MARVEL使用了一个基于天线多样性的解决方案,通过在每一辆车上安装四个特殊的射频收发器以及GPS和惯性传感器,从而去提供相对的车道定位。它让一辆车去决定别的车的相对位置。所有这些技术为了实现功能需要专门的硬件,有时还要普遍部署,这些限制了它们大规模的应用。在另外一方面,LaneQuest只使用在智能手机中很容易获得的节能的惯性传感器即可去提供一个准确的车道估计,而不需要在车上去安装任何专门的设备或者一个昂贵的预校准数字地图。
2.1.2 智能手机传感器技术
在[12]中,作者提出使用iPhone摄像头去检测车道标志。在[16]中,作者提出利用智能手机中新的多核能力去改善车道检测准确度和延迟。然而,在车道检测中使用摄像头很容易产生错误,因为它易受到很多因素的影响,比如光线情况,糟糕的天气情况和别的环境噪声。此外,摄像头对有限的手机电池电量有较高的能量需求。
与此相反,LaneQuest只使用智能手机中节能的惯性传感器便可提供一个准确的车道估计。另外,它采用一个概率的框架,考虑到由于传感器噪声和众包技术导致的可能的不确定,从而去提供一个稳健的车道估计。
2.2 道路感知和驾驶行为检测
惯性传感器在文献资料中被用来检测驾驶行为,识别语义地图和监控道路问题。例如,在[18,20]中,作者用惯性传感器去检测驾驶员的驾驶质量。它们识别驾驶模式事件像变道,加速和减速等,是根据这些事件的频率和突然性。在[19]中,作者用惯性传感器和一个安装在汽车上的外部传感器去感知汽车的移动,当驶过弯道时去检测驾驶员的手机使用情况(手机是在汽车的左边还是右边),目的是为了在驾驶过程中不让驾驶员使用手机。LaneQuest利用相似的事件去决定当前的车道,并且进一步扩展去区分相近的事件,例如转弯和在曲线上行驶,这样去提供更稳健的和准确的车道定位。
在[21]中,作者除了使用智能手机中的惯性传感器,还提出使用各种各样的语义地图去丰富数字地图,例如隧道,环状交叉路口和桥梁等。在[24]中,作者使用智能手机中的加速度计去检测坑洼,但是并不区分它们和正常的交通稳静化设备如缓冲带。另一方面,Pothole Patrol和Nericell系统使用一个三轴的加速度计和GPS去检测道路上的坑洼,并且在加速度上应用了一系列的过滤器去区分坑洼和别的像缓冲带这样的东西。它们认为预期减速带的位置是已知的,这样便可以区分它们和坑洼。Nericell和Pothole Patrol都使用外部传感器芯片,它们相比于市场上典型的智能手机芯片有更高的抽样率和更低的噪声。
与这些系统相比,LaneQuest使用智能手机中便宜的惯性传感器去检测驾驶模式像变道或者道路信息像隧道。更为重要的是,它能识别出更好的车道级锚点。例如它不仅仅只检测出隧道的一个锚点,而是检测在隧道中不同的车道锚点。此外,它使用一个无监督的众包方法去了解这些车道锚点的特征。
3.系统概述
图2展示了LaneQuest系统结构的概览。LaneQuest利用附着在挡风玻璃或仪表盘上的手机中的惯性传感器去估计汽车的车道位置。它依靠着汽车动态的变化(例如变道)和检测车道锚点去估计车辆当前的车道。这个系统有四个主要的部分:预处理模块,事件检测模块,车道概率估计模块和锚点更新模块。在这一节,我们大概介绍一下每个模块。
图2 LaneQuest系统的结构
3.1 预处理模块
这个模块是负责处理原始的传感器输入和位置信息以减少噪声的影响。LaneQuest从手机惯性传感器中收集时间和位置标记的测量数据,这些包括加速度计,陀螺仪和磁力计。为了处理在传感器读数中的噪声,我们使用了一个低通滤波器。此外,我们也把传感器读数从手机坐标系统转化到汽车坐标系统。
至于定位信息,LaneQuest不需要一个专门的定位技术,它可以依靠GPS等相关技术。为了进一步提高输入位置的精度,我们应用地图匹配去在道路网络中对齐汽车的位置估计。
3.2 事件检测模块
基于很多驾驶模式在不同手机传感器中有独特的特征,它们可以提供车辆当前车道的线索。例如,当一辆车向右变道到相邻的车道,那么这辆车很可能不在左边的车道。这个“变道事件”可以被手机惯性传感器检测出来,并且可以被用来降低车辆当前车道的模糊性。
相似的,当车辆掉头时,它最可能在左边的车道。因此,使用手机中的方向传感器可以检测出车辆在掉头时方向改变了大约plusmn;180°,LaneQuest使用这个“掉头锚点”的线索去降低车辆当前车道的模糊。
3.3 车道概率估计模块
为了从带有噪声的惯性传感器测量数据,模糊的车辆位置,人们的驾驶行为以及模糊的车道锚点位置获得稳健的和准确的车道估计,LaneQuest使用了一种概率估计的技术。特别地是,我们的车道定位技术是基于马尔可夫定位的,众所周知这是在机器人领域用来解决从带有噪声的传感器数据中进行状态估计问题的技术。
于是,LaneQuest使用马尔可夫定位去主张一个对所有可能的车道的概率分布。这个概率表示让它去权衡不同的假设,从而用一种数学原则的方法去达到一个更为准确的车道估计。LaneQuest不做任何车辆起始车道位置的假设,对所有车道来说它是被建模为一个均匀概率分布。然后,当车辆在路上移动,任何车辆移动的线索(比如变道)或者被检测到的车辆锚点(比如一个坑洞)都可以被用来更新车道的置信分布。例如,假设一辆车正行驶在一条四车道的道路上并且向右进行了三次变道,每次被检测到车辆变道都会更新车道位置概率分布。在第三次变道后,汽车最可能在最右边的车道。类似的,如果我们知道在第二条车道上大约在汽车附近有一个坑洞,并且汽车经过了它,那么汽车最可能在第二条车道上。
4.车道概率估计
在这节中,我们具体地介绍了LaneQuest新颖的车道概率估计方法。
4.1 模型概述
让ℓt 剩余内容已隐藏,支付完成后下载完整资料
资料编号:[148400],资料为PDF文档或Word文档,PDF文档可免费转换为Word
您可能感兴趣的文章
- 饮用水微生物群:一个全面的时空研究,以监测巴黎供水系统的水质外文翻译资料
- 步进电机控制和摩擦模型对复杂机械系统精确定位的影响外文翻译资料
- 具有温湿度控制的开式阴极PEM燃料电池性能的提升外文翻译资料
- 警报定时系统对驾驶员行为的影响:调查驾驶员信任的差异以及根据警报定时对警报的响应外文翻译资料
- 门禁系统的零知识认证解决方案外文翻译资料
- 车辆废气及室外环境中悬浮微粒中有机磷的含量—-个案研究外文翻译资料
- ZigBee协议对城市风力涡轮机的无线监控: 支持应用软件和传感器模块外文翻译资料
- ZigBee系统在医疗保健中提供位置信息和传感器数据传输的方案外文翻译资料
- 基于PLC的模糊控制器在污水处理系统中的应用外文翻译资料
- 光伏并联最大功率点跟踪系统独立应用程序外文翻译资料


