英语原文共 7 页,剩余内容已隐藏,支付完成后下载完整资料
一种弹性系统内基于布拉格光栅复用实现的分布式压力测量系统
摘要
在本文中,展示了一个全新的分布式压力测量系统,它是通过光纤布拉格光栅的多路复用而实现的,并嵌入弹性系统中。该传感系统包括内置管道和一些间隔器和压力膜片实现被检位置的定位并为光纤布拉格光栅提供机械支撑,线状弹性应变光学模型被用来预测传感器的静水压力灵敏度性能。预测模型通过了实验验证并表明当模型外径为1毫米时,压力灵敏度高达2.94 nm/MPa(兆帕)。在所有的满量程施加压力校准实验中最大测量误差为3.4%。据作者所知,这是目前最小的基于光纤布拉格光栅的多路复用压力传感器的报告。由于它的超小尺寸,这种传感器可能被应用在医疗应用上,尤其是现有的传感器显得过大的冠状动脉造影术上。
索引词:生物医学,光栅,多路复用,压力,传感,传感器
1.前言
基于光纤布拉格光栅的传感器技术已经被广泛运用于测量参数中,包括张力,温度,湿度,压力以及光折射率等。 光纤布拉格光栅传感器的关键特征是它们的尺寸小和对电磁干扰的良好屏蔽作用,在经过适当的包裹后不会引起生物体的过敏并降低了对湿度的敏感度。另外,它非常适用于分布式测量,在使用波分复用技术时,一个单独的光纤束可以对多个光栅进行独立查询。利用这种能力,光纤传感系统已经被用于肠胃压力的分布式测量。根据(阿克莱特等相关作者)描述,在高分辨度测压时,这一系统共有32个传感器,每一个外径为3毫米,以10毫米为间隔得放置于一条可弯曲的导管中。每一个传感器包括一个包裹在弹性膜片内的光纤光栅结构,用于反应当前压力。目前,该系统已经成功运用在人体内食管中。还有其他作者也描述了类似的传感系统,每一个都由被封装在5毫米外径的柔性聚合物柱的光纤光栅构成。加在圆柱外表面的压力会向光纤光栅产生轴向的延展。这个设计的可行性已经通过试验台上单个传感器测试验证。
在当前的工作中,另一种基于光纤光栅的分布式压力测量系统已经开发出来,其直径较前两者系统有着显著的缩小。该系统具有在高分辨率测压中的应用前景巨大,尤其是其直径较小,在血管造影方面也有巨大潜力。本文将对系统的设计和性能进行介绍。
2.材料与方法
2.1 多点分布式传感系统设计
多点分布式传感器系统,以下简称为系统,包括光纤光栅,都集成到一个面结构中提高了光纤光栅的压力灵敏度。光纤光栅有一个稳定的周期性变化光纤芯反射指数。光纤光栅的长度和幅度以及空间在折射率改变的时期中决定了光纤光栅反射出的光谱。当光在宽波长范围内通过一个常规单模光纤光芯的传播时,遇到一个布拉格光栅,反射光谱就会变窄。这个频谱集中于布拉格波长,给定的公式为:
其中Lambda;为折射率变动的空间周期。n为光芯的反射率(一般为1.458)。对于实际使用的传感器而言,其布拉格波长的变化也被定义为△lambda;B,它是因为静水压力造成的轴向形变ε而产生的,也可以利用下式计算:
这里的k代表的是光纤布拉格光栅对于轴向应变的灵敏度(也就是,1.2pm/micro;ε)布拉格波长的改变还和温度有关,主要因为热光学效应和光纤的膨胀。紧接在传感器物理外形后面还有用于预测传感器灵敏度的方程。
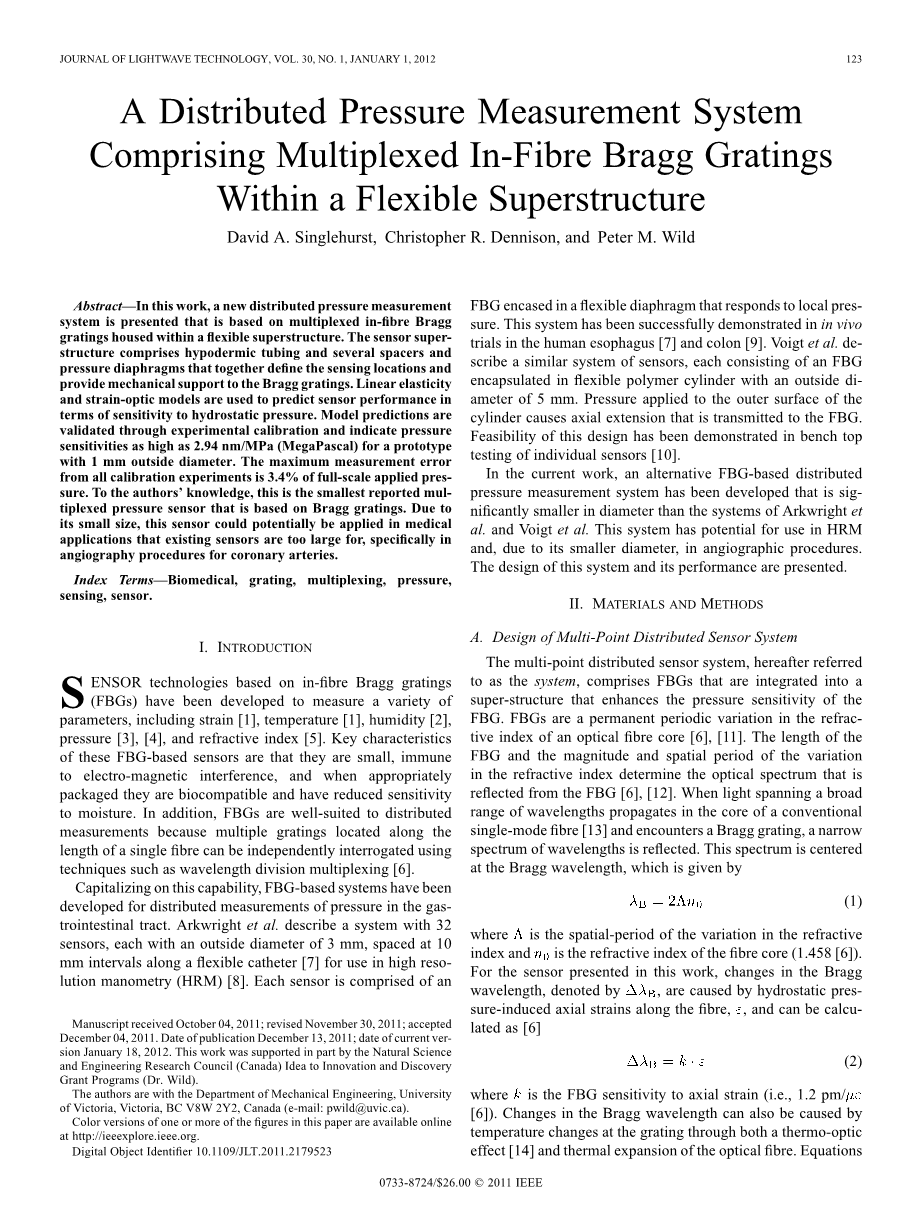
图1 传感器物理构造
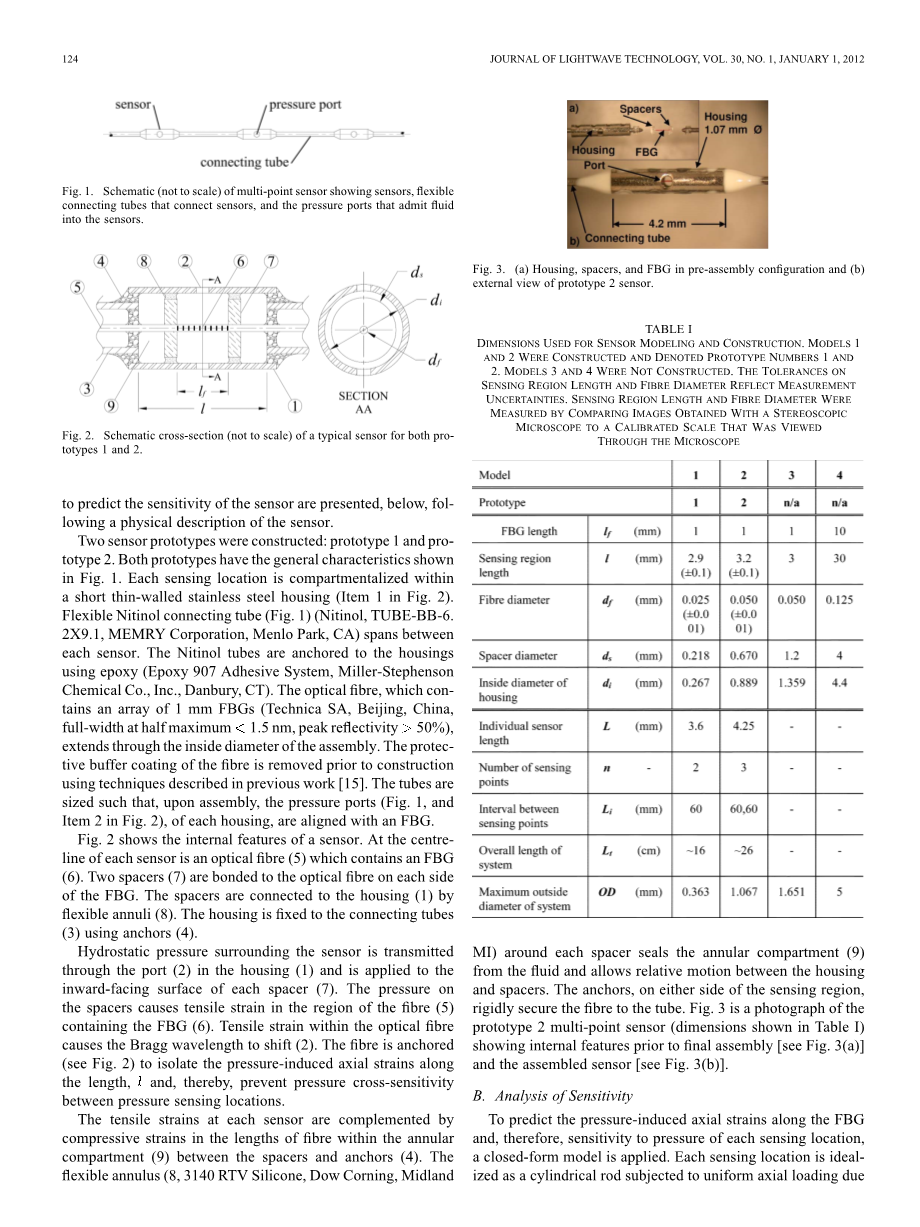
两个传感器原型被相互连接着,分为:原型1和原型2。所有的原型都具有和Fig.1中相同的特征。每一个传感器单元都被短小细的不锈钢外壳包裹。柔性钛合金导管连接着每一个传感器。钛合金通道使用环氧基树脂外壳固定。光纤包括一组1毫米布拉格光栅单元(中国北京泰克里科光学公司,反射率峰值gt;50%)延伸通过管道内径进行装配。在组建技术验证平台之前的工作中去掉保护光纤纤维的缓冲层。通道尺寸,压力端口装配均如Fig.1和Fig.2中项目2所示。每一个外罩均对准一个布拉格光栅单元。Fig.2展示了传感器的内部构造。每一个传感器的中心线是一道光纤(项目5)包含光纤光栅(项目6)。两个垫片被用于结合光纤。它们通过柔性圆环(项目8)与外壳(项目1)相连,外壳使用连接点(项目4)固定于管道是(项目3)上。
环绕在传感单元上的静态水压通过外壳(项目1)上的端口(项目2),并适用于每个间隔装置的内表面(项目7),压力造成这一隔间区域内含有光栅的光纤(项目5)产生应力形变。光纤的应力形变导致布拉格波长的移位。将光纤固定从而分离出由压力引起的轴向应变,当然,也要避免压力测量位置处的压力交叉。
2.2 灵敏度分析
为了预测光纤光栅间的轴向压力,因此使用一个封闭模型来代替每个感应位置的压力敏感度。每一个传感位置被理想化为承载静水压力而产生轴向负载的圆柱体。为达到这一分析目的,设定通过柔性管道而将外部管道的轴向应变压力传输至间隔的影响可以忽略。这主要是由硅组成的柔性垫有着较软的弹性模型(大约为372kpa)比硅玻璃和钢低了几个数量级。
我们假设固定物和钢管都具有极强的刚性以致整体测量长度保持一致。基于光栅的位置是对称放置的,我们假设最中间的那个光栅是不动的,即可以被认为是固定的。(Fig.4)
图2 应力分析
可知Fig.4中传感器位置的受力平衡公式如下:
应用胡克定律进行变换:
其中E为融化态硅晶体的杨氏模量,联立上式,可知独立的拉力计算方程:
则内表面的压力可以被表示为:
联立上式全体,可知:
则,单位长度内光纤光栅的负载为:
为了计算压力的敏感度,S,也可以理解为每单位压力造成的波长位移,其计算公式为:
上式中k为布拉格光栅的压力敏感度(一般取12pm/micro;ε)。
虽然柔性垫片被假设为不向间隔传输任何作用力,而且其规格尺寸和传感器的灵敏度有关。设定流体均匀地施加在柔性垫片和间隔空间的环形表面。然而,因为施加于这垫片处的轴向力还是会引起支撑作用的外壳和间隔内的应力改变。因此,在实验中我们有望得到的压力敏感系数是大于理论计算值的。考虑到这种差异,我们为Ds设定了一个取值范围,通过间隔得直径而指定的Ds作为计算敏感度的下限,以外壳的内直径得到的特定Ds值为上限。
2.3 实验校准
图3 校准模型
多点传感系统使用一个内置的校准装置进行校准。仪器由一个血压校准泵,多个压力室,标准压力传感器以及各种液压配件和旋塞阀构成。每一个压力室是独立并使用其周围的连接管而密封的压力装置。传感器单元通过可换针头型气密性开口位置插入至压力容器中。控制阀门位于每一个压力室之间,用于隔离或者传输压力至每个压力室。静水压力通过一个被函数发生器控制的血压校准泵来模拟实现。
布拉格波长的位移通过一个高速光谱分析仪来确定,并使用专门的实验室记录软件和数据采集设备来记录实验数据。SM130分析仪的光学检测范围为25db,可调节噪声阀值和光学增益。通过调整噪声阀值和光学增益,噪音的低谷与峰值电平来最大程度地显确光纤光栅的峰值即使是其光谱极小的初始重叠。
在原型2的测试中,举例,对噪声阀值和增益进行了调整,在过零的情况下,1毫米光纤光栅的光谱宽度大约为2.5nm,压力的敏感度大约为2500pm/MPa,根据随后结论中的数据来看,当压力到达上限时,最大波长位移大约为167pm。当光谱分析仪的光谱带宽为80nm,每个光纤光栅的光谱带宽为2.5nm和0.5nm缓冲区情况下,最大位移为0.2nm。保守估计每个单模光纤上大概可以放置23个光栅单元。通常消化道测压传感系统需要32个单元,另外9个传感单元需要我们添加光纤或者我们也可以采用带宽大于80nm的光谱分析仪和光纤从而允许添加更多的传感单元。
2.4 校准方式
每一种模型都会经过两种方法测试。在方法1中,同时校准所有传感器位置。利用参考压力测量器将等于0至100mmHg的静水压力模拟出来。虽然这个最大压力范围并没有达到实际应用中动脉200毫米汞柱或者肠胃道中500毫米汞柱的最大范围,但是我们数据采集硬软件能可靠测量的最大范围了。采集硬软件收集压力与波长的数据的频率为30赫兹。每一个传感器位置的压力或者波长数据都会被处理,并通过线性回归的方法来测量单位灵敏度即单位波长位移压力的大小。在方法2中,静水压力将会被独立地作用于每个测量位置,从而测试相邻位置传感器之间的交叉敏感度。和方式1一样,采用0到100mmHg的静水压力来实现测量。
3 实验结果
3.1 计算灵敏度
在图4中展示了当布拉格光栅固定为1mm,光纤的直径固定为0.05mm时所计算出的光纤光栅模型的敏感度大小。之所以选择选择这样的尺寸,是因为它们表示的最小光纤光栅长度和最小光纤直径满足在构建一个能在所有应用环境下使用的多点传感器的情况下使传感器和外径足够小。另一个图表作为一种辅助设计工具展示了垫片直径和测量区域的长度对于测量的灵敏度有多大影响。举例,当一个传感器结构的大致尺寸是和原型2相近,即当光纤半径为0.05mm,光栅长度1mm时,垫片半径为0.67mm,传感区域长度为3.2mm的情况下,敏感度为0.266pm/mmHg。
图4 敏感度关系
3.2 模型1,2的校准
图5 原型1在校准方法1下结果图
在图5中,给出了原型1在校准方式1的校准过程中得到的典型数据。所测得的数据在施加的压力范围内具有明显的线性相关性。系统对压力的敏感度可由线性回归来决定。在近端测量位置处的数值为0.144pm/mmHg,在测量位置末端的数值为0.165pm/mmHg。测量远端和近端的线性回归相关系数均为0.99。
在图6中显示了光纤光栅在模型1和方式1参考压力传感器的情况下,其近端或者远端传感位置处测量到的压力随时间变化的趋势。通过近远端传感位置产生的布拉格波长位移所需要的静水压力的平均值来计算光纤光栅测量出的压力。在满量程的情况下,通过计算得到的数值与标准压力感应器的数值的误差分别为:近端3.4%,远端2.7%。
图6 压力随时间变化图
图7 方式2校准数据
在图7中显示了模型1在方式2中得到的典型校准数据。可以看出,当向测量远端施加压力时,测量近端处的交叉敏感度可以忽略不计。相比于此处独立的传感器而言,布拉格波长并没有发生可以明显看出的改变。所以,交叉敏感度基本可以被忽视。
图8显示了模型2在方式1的校准过程中得到的典型校准数值。所有三个测量位置的数据在压力的应用量程之内表现出了明显的线性关系。通过计算可知线性方程的斜率或者说敏感度在近端测量位置为0.323pm/mmHg,测量中端位置的数值为0.352pm/mmHg,远端测量位置处为0.349pm/mmHg。这些线性回归方程的线性相关性为0.99,可以被应用于任何一个位置处的传感单元的计算。
图8 模型2在方式1下三组数据
对于模型2的压力测量结果来看,对于全量程应用压力的情况下,光栅光纤测量得到的压力和参考传感器测得的数据在近端位置的平均误差为1.05%,中间位置的平均误差为0.87%,远端位置处的误差为0.91%。
3.3 敏感度计算与测量结果对比
图9 敏感度汇总表
图9中显示了实验和计算得到的敏感度。鉴于模型1实验中中近端和远端的数值分别为0.144pm/mmHg和0.165pm/mmHg,属于敏感度计算范围之内。这一值表示间隔直径分别为0.246毫米和0.264毫米。同样的,对于模型2,实验中得到的近端,中端或者末端的敏感度均处于敏感度计算范围之内。这些值表示间隔直径分别为0.719,0.750,和0.747毫米。
4 结论
本文提出的这个分布式传感系统较之前出现的分布式光学压力传感系统一个重要的优势就是更小。在本项研究中,最小的模型的外径只有0.363mm。这一数值比Arkwright等人提出的系统要小88%,比Voigt等人提出的系统要小93%。不像2009年Arkwright等人或者2010年Voigt等人提出的传感器那么大只能适用于肠胃应用场景中,本次研究中提出并介绍的传感系统的外直径是可以适用于血管造影的。即使是在肠胃道内应用,该传感器的小尺寸也是一个关键优势,因为较小的传感器能减少肠胃蠕动的干扰,因此可以提供提供更准确的体内压力数值而不像尺寸更大的传感器那样有可能将食道与传感器之间的接触力作为人体里血液流动压力。同时,本系统也保留了2009年Arkwright等人或者2010年Voigt等人提出的传感系统中机械灵活度和传感位置处的交叉影响可以忽视的特点。
在消化道测压中,压力测量误差最主要的源头是肠道蠕动引起的轴向应变。更具体地说,当肠道吸附住传感器的外表面并产生张力,经过蠕动之后,传感系统往往会经受到轴向应变。这种轴向应变不只可以发生在几个探测器位置并且会造成每一个位置的传感器都产生布拉格波长位移即轴向变动(也就是应变敏感度)。如果不能适当地处理,这些轴向应变带来的波长位移将会被错误地当成压力带来的影响(
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[148401],资料为PDF文档或Word文档,PDF文档可免费转换为Word
您可能感兴趣的文章
- 饮用水微生物群:一个全面的时空研究,以监测巴黎供水系统的水质外文翻译资料
- 步进电机控制和摩擦模型对复杂机械系统精确定位的影响外文翻译资料
- 具有温湿度控制的开式阴极PEM燃料电池性能的提升外文翻译资料
- 警报定时系统对驾驶员行为的影响:调查驾驶员信任的差异以及根据警报定时对警报的响应外文翻译资料
- 门禁系统的零知识认证解决方案外文翻译资料
- 车辆废气及室外环境中悬浮微粒中有机磷的含量—-个案研究外文翻译资料
- ZigBee协议对城市风力涡轮机的无线监控: 支持应用软件和传感器模块外文翻译资料
- ZigBee系统在医疗保健中提供位置信息和传感器数据传输的方案外文翻译资料
- 基于PLC的模糊控制器在污水处理系统中的应用外文翻译资料
- 光伏并联最大功率点跟踪系统独立应用程序外文翻译资料


