
英语原文共 10 页,剩余内容已隐藏,支付完成后下载完整资料
YOLO: 一体化的,实时的物体检测
摘 要
我们介绍一种新的物体检测方法YOLO。与先前的物体检测方法是重新设置分类器来执行检测不同,我们将物体检测方法看做一个回归问题,去预测空间分离的边界框和相关类别概率。单个神经网络从整个图片中一次性预测边界框和类别概率。由于整个检测流程是一个单一网络,所以可以进行端到端的直接对检测性能进行优化。
我们的这种单一网络结构体系速度非常快。我们的基本YOLO模型实时处理图像速度为每秒45帧。较小的YOLO模型版本,Fast YOLO可以实现每秒155帧的实时检测速度,同时实现mAP是其他物体检测网络的两倍左右。与当前最先进的物体检测方法相比,YOLO会出现较多的定位误差,但是从背景中检测出假阳性目标较少。最后,YOLO可以学习物体非常抽象的特征,所以在自然图像之外的其他检测领域比如艺术品的检测中,YOLO优于包括DPM和R-CNN在内的其他检测方法。
1. 介绍
人们只需瞥一眼图片就知道图片中有什么物体,物体的位置及它们之间的联系。人类的视觉系统是快速而准确的,使我们可以做很复杂的事,比如开车时不用刻意去思考。快速,准确的物体检测算法将允许计算机在没有专用传感器的情况下驾驶汽车,使辅助设备能够向人类用户传达实时场景信息,并释放通用,响应式机器人系统的潜力。
当前的检测系统重新利用分类器来执行检测。 为了检测物体,这些系统为该物体提供一个分类器,并在不同的位置评估它,并在测试图像中进行缩放。 像可变形零件模型(DPM)这样的系统使用滑动窗口方法,其中分类器在整个图像上以均匀间隔的位置运行[10]。
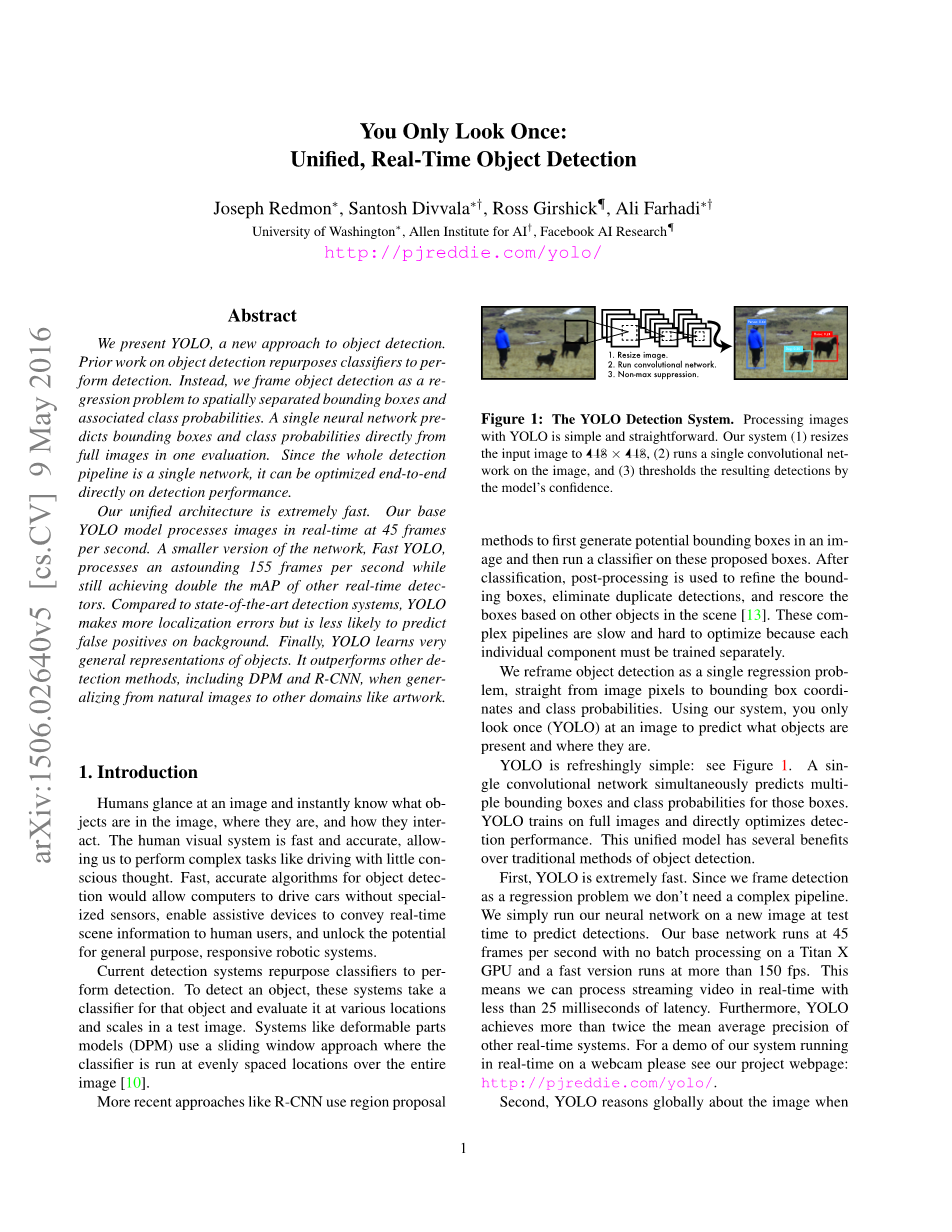
图一:YOLO检测系统,YOLO处理图像简单直接,我们的系统(1)调整输入图像大小为448*448。(2)运行单个卷积网络处理图像。(3)用模型的置信度对检测结果进行阈值处理。
最近的方法比如R-CNN使用候选区域的方法,首先在图像中生成候选框,然后在候选框上运行分类器。分类之后,后续的操作是优化边界框、消除重复检测,最后根据图像中其他物体来重新定位边界框。这些复杂的流程很慢而且优化困难,因为每个组件都需要单独训练。
我们将物体检测系统,输入图像像素输出边界框坐标和类概率,重新设计为一个回归问题。使用我们的系统,只需运行一次就可以知道图像中有什么物体以及物体的位置。
YOLO非常简单:参考图片1,单个神经网络可以同时预测多个边界框和类概率 ,YOLO直接在整个图像上训练,并直接优化检测性能。这个统一的模型比传统的物体检测方法有几个优势。
第一,YOLO速度非常快。由于我们的检测是当做一个回归问题,不需要很复杂的流程。在测试的时候我们只需将一个新的图片输入网络来检测物体。在Titan X GPU上我们的基本网络检测速度可以实现45帧每秒,快速版本检测速度可以达到155帧每秒。这意味着我们可以以小于25毫秒的延迟处理流媒体视频。此外YOLO相比其他实时检测系统可以达到两倍的mAP,请参阅我们的项目网页http://pjreddie.com/yolo/.,上面有我们项目在网络摄像头上的实时运行演示。
第二,YOLO在预测时可以整体的检测图像。与基于滑动窗口和候选区域的方法不同,在训练和测试期间YOLO可以看到整个图像,所以它隐式的编码相关类的上下文信息及外观。Fast R-CNN是一种顶级的检测方法,由于它无法看到更大的上下文信息所以会从背景中检测出错误的物体,YOLO出现背景误差的概率是Fast R-CNN的一半。
第三,YOLO学习图像的抽象特征。当在自然图像上进行训练,并在艺术品上测试时,YOLO的效果大幅优于DPM和R-CNN等顶级检测方法。由于YOLO是高度抽象化的,所以在应用到新的领域或者有意外输入时不太会出现故障。
YOLO 在检测准确率上仍然大幅落后于最好的检测方法。虽然YOLO可以很快的识别出图像中的物体,但是在精准定位物体尤其是较小的物体位置上还需要更多的努力。我们在实验中正进一步测试如何平衡这些方面。
我们所有的训练和测试代码都是开源的,还提供一些预训练的模型可供下载。
2.统一检测
我们将物体检测的单独组件集成到一个神经网络中。我们的网络使用整个图像的特征来预测每个边界框,网络还同时预测所有类的所有边界框,这也就意味着我们的网络全面的预测整个图像和图像中的所有的类。YOLO网络的设计保证能够实现端到端的训练和实时检测的速度,同时实现较高的检测平均精度。
我们的系统将输入图像划分成S times; S个网格。如果一个物体的中心点在某个网格中,则这个网格负责检测这个物体。每个网格单元预测B个边界框以及每个边界框的confidence(置信度)。这些confidence反映了网络模型对该边界框是否含有物体的信心,以及边界框位置预测的准确度。 在形式上我们将confidence定义为 C = Pr(Object) lowast; IOU truth pred( Pr(Object)网格存在物体为1,不存在为0),如果网格中不包含物体则Pr(Object) = 0则confidence为0,包含物体Pr(Object) = 1则confidence等于预测边界框和真实边界框的IOU(交并比)。
每个边界框有5个预测值:x,y,w,h,confidence,(x,y)代表预测边界框的中心点坐标,w,h是边界框的宽度和高度,confidence是预测边界框和真实边界框的IOU。
每个网格预测C个条件类别概率, Pr(Class i |Object),这是网格中含有物体的条件下属于某个类别的概率,每个网格只预测一组条件类别概率,B个边界框公用。
测试时我们将条件类概率和confidence相乘,为我们提供了每个边界框在各个类别的得分值 ,这些得分值代表该类别物体出现在框中的概率和边界框与物体的拟合程度。
图片2:网络模型。我们的模型将检测当做一个回归问题,网络将输入图像划分成 S times;S个网格,每个网格预测B个边界框,B个confidence,一个C位的条件类别概率。
在PASCAL VOC数据集上评估YOLO,S = 7,B = 2,C = 20(因为PASCAL VOC数据集中有20个标记类) ,我们的最终预测结果是7 times; 7 times; 30张量。
2.1设计
我们将模型以卷积神经网络来实现,在PASCAL VOC数据集上评估。网络的初始卷积层用来提取图像特征,全连接层用来预测类别概率和坐标。
我们的网络结构受到图像分类网络GoogLeNet[34]的启发,我们的网络包括24层卷积层和2层全连接层,不同于GoogLeNet使用的Inception块,我们使用和Lin等人[22]一样的结构,一个1times;1卷积层后面跟一个3times;3卷积层。完整的网络结构可以查看图片3。
图片3:网络架构。我们的检测网络包含24个卷积层和2个全连接层,交替使用的1times;1卷积层降低前一层的特征空间。我们使用一半(224times;224输入图像)的输入在ImageNet图像分类任务中预训练卷积层,然后在检测时将输入加倍。
为了加快检测速度我们还训练了一个快速的YOLO版本。Fast YOLO 使用较少的卷积层,9层而不是普通版的24层,和更小的卷积核。除了网络较小,Fast YOLO和YOLO训练和测试参数是一样的。我们的网络最终输出是7 times; 7 times; 30的预测张量。
2.2训练
我们在ImageNet 1000类数据集上预训练我们的卷积层。预训练时我们使用图3中的前20为向量、一个平均池化层、一个全连接层。我们训练这个网络一周时间, 在ImageNet 2012数据集中获得了88%准确率排名位于前5名,与 Caffe上训练的模型中的GoogLeNet模型相当。我们使用 Darknet框架进行所有的训练和预测。
然后我们转化网络执行检测。Ren等人提出在预训练模型中加入卷积层和全连接层可以提高性能[29]。根据他们的想法,我们添加了随机初始化参数的4个卷积层和2个全连接层。检测任务需要细粒度的视觉信息,所以我们将网络输入的分辨率从224times;224增加到448times;448。
我们在最后一层输出类别概率和边界框坐标。我们通过图像的宽度和高度来标准化边界框的宽度和高度至0到1之间,我们将边界框x和y坐标参数化为相对特定网格的偏移量,使其值处于0到1之间。我们对最后一层使用线性激活函数,其他层使用以下激活函数。
我们使用平方和误差来优化模型。使用平方和误差较容易优化,但是不能完全符合我们最大化平均精度的目标。它将定位误差和分类误差同等对待是不太合理的,而且在图像中有很多网格不包含任何物体,将这些网格的置信度趋向于零时的梯度将会超过含有物体的网格的梯度,这会导致网络不稳定,从而使网络在训练初期就出现梯度爆炸。
为了弥补这一点,我们增加了边界框坐标预测损失的权重,并减少了不包含物体的边界框的置信度预测损失的权重。我们使用两个参数lambda;coord和lambda;noobj来完成这个。我们设置lambda;coord = 5和lambda;noobj =0 .5。
平方和误差计算损失时将大框和小框同等对待,同样的一个损失值对大框的影响小于对小框的影响。为了解决这个问题,我们计算损失时先对框的宽度和高度求根号再计算平方和。
YOLO为每个网格预测多个边界框。在训练时我们希望每个物体只有一个边界框负责检测这个物体。我们选择和真实物体位置IOU最大的边界框作为负责检测这个物体的边界框。这使得我们的边界框预测变量都负责预测特定物体。所以每个预测变量可以更好地预测边界框尺寸,纵横比或物体类别,从而改善整体召回率。
训练期间我们优化下图中的损失函数:
其中的 代表的是第i个网格中是否含有物体,以及第i个网格中的第j个边界框负责预测这个物体。
请注意,如果网格中含有物体,损失函数只需考虑分类损失(因此条件类概率在前面讲)。如果这个预测器负责预测真实边界框(和网格中的所有预测器都有最高的IOU),损失函数只考虑预测坐标损失。
我们在PASCAL VOC 2007和2012的训练和验证数据集上对网络进行了大约135个epochs的训练。当在VOC 2012上测试的时候,我们也包含了VOC 2007的测试数据用来训练。训练中我们的batch size为64,momentum为0.9,decay为0.0005。
我们的learning rate(学习率)计划如下:在第一个epoch中我们将learning rate慢慢的从0.001提高到0.01,如果我们从较高的学习率开始训练,由于不稳定的梯度会导致网络发散。我们以0.01训练75个epoch,再以0.001训练30个epoch,以0.0001训练30个epoch。
为了避免过拟合我们使用了dropout (神经元随机失效)层和数据增强的办法。在第一个连接层之后,速率为0.5的dropout层防止了层之间的联合性(dropout强迫一个神经单元,和随机挑选出来的其他神经单元共同工作,达到好的效果。消除减弱了神经元节点间的联合适应性,增强了泛化能力。)[18]。对于数据增强,我们引入达到原始图像大小20%的随机缩放和平移。我们还在HSV色彩空间中随机调整图像的曝光和饱和度达1.5倍。
2.3前向传播
和训练时一样,在检测测试图像时只需网络执行一次预测。在PASCAL VOC上为每个图像预测98个边界框,每个边界框预测一个置信度得分。不像基于分类器的检测方法,YOLO因为只需运行一个网络,所以执行速度很快。
网格的设计在边界框预测中强制实现空间多样性。通常我们很清楚物体落入哪个网格中,并且模型为每个物体只预测一个边界框。但是,一些比较大的物体或者是在跨越多个网格边界的物体,可以被多个网格都很好的检测出来(即一个物体被多次检测出来造成多重检测问题)。可以使用NMS(非极大值抑制)来解决这种多重检测的问题。虽然NMS对YOLO性能的影响不像对R-CNN、DPM性能影响那么大,但也能提升2-3%的MAP值。
2.4 YOLO的局限性
YOLO对边界框预测施加了强烈的空间约束,因为每个网格单元只预测两个框,并且只能有一个类。这种空间约束限制了模型能预测网格附近物体的数量。我们的模型在图像中出现的成群的小物体(比如鸟群)时将会出现物体间的竞争。
由于我们的模型从数据中学习如何预测边界框,因此它遇到新的数据或数据不寻常的高宽比或配置时将较难适应。因为我们的模型在输入图像中有多个下采样层,所以我们的模型是使用相对粗糙的特征来预测边界框。最后,我们在训练一个损失函数不断提高检测性能时,我们将小边框和大边框的损失同等对待。一个
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[591054],资料为PDF文档或Word文档,PDF文档可免费转换为Word
您可能感兴趣的文章
- 饮用水微生物群:一个全面的时空研究,以监测巴黎供水系统的水质外文翻译资料
- 步进电机控制和摩擦模型对复杂机械系统精确定位的影响外文翻译资料
- 具有温湿度控制的开式阴极PEM燃料电池性能的提升外文翻译资料
- 警报定时系统对驾驶员行为的影响:调查驾驶员信任的差异以及根据警报定时对警报的响应外文翻译资料
- 门禁系统的零知识认证解决方案外文翻译资料
- 车辆废气及室外环境中悬浮微粒中有机磷的含量—-个案研究外文翻译资料
- ZigBee协议对城市风力涡轮机的无线监控: 支持应用软件和传感器模块外文翻译资料
- ZigBee系统在医疗保健中提供位置信息和传感器数据传输的方案外文翻译资料
- 基于PLC的模糊控制器在污水处理系统中的应用外文翻译资料
- 光伏并联最大功率点跟踪系统独立应用程序外文翻译资料


