
英语原文共 22 页,剩余内容已隐藏,支付完成后下载完整资料
空中加油的进展
摘要:过去十年来,越来越多的兴趣开发无人驾驶空中系统的技术,促使研究空对空加油过程自动化的方法。 此外,对于具有更高自主权的系统,现在正在追求执行自主空中加油的必要的逻辑和飞行控制系统。 已经对位置跟踪,会合调度,设备建模,尾流效应和基于视觉的传感器进行了重大研究,以支持无人驾驶系统的加油和增加载人飞机加油的自主性。 其中许多建立在对载人航空加油成熟的大量研究和认识上。 本文回顾了当前和未来在这一领域的研究现状。
关键词:空中加油 自主空中加油; 无人机系统; 飞行控制; Drogue稳定; 模拟和测试
1.介绍
空中加油(AAR)是通过在飞行中加油而提高飞机的耐久性和射程的有效方法。 其成立于1917年由俄罗斯美国人亚历山大·德·塞维斯基(Alexander de Seversky)进行,然后在1920年代以15米长的橡胶软管和手动流量阀的形式进行了实验示范。 此后,它已经陆续被研究,开发和从事耐力航班,导致了1949年第一次不间断循环航班。计划采用第二次世界大战结束的方法不被继续,其第一次军事使用是 因此在五十年代以后的朝鲜战争中。
最近,自主空对空加油(AAAR)对于无人驾驶空中系统(UAS)的持续研究越来越受到关注。 过去十年来,有关飞机控制,传感器系统及其整合加油过程自动化的理论和实践方面的研究和学术出版物大量丰富。 为了开发和评估这些模拟模型,其范围从飞机的简单参数化到复杂的物理表示,空气动力学和大气扰动以及加油装置已经被开发出来。 本文详细介绍了这些问题的重大进展,并突出了AAR和AAAR在公共领域的能力现状。
1.1 加油方式
第一个足够强大的日常使用的AAR系统由RAF中队领导Richard L.R. 在30年代中期的Atcherly。 “环形软管”系统是原始橡胶软管方法的优越版本,附加连接器和配件可简化连接过程。 该专利后来由Alan Cobham购买,并由其英国公司加油有限公司(FRL)进一步开发。 它被用于小型空中货机,以通过在起飞后在空中加油来节省燃料成本[1]。 不过这很短暂的持续下去 - 随着第二次世界大战的开始,它被放弃了。 战争后FRL在战后受到有限的商业利益,但由美国空军(USAF)接手,他们购买了技术许可证,以期预期到底是什么成为冷战。
美国空军和FRL都意识到,虽然环形软管方法对于货物运输和大型轰炸机来说都是令人满意的,但是由于需要足够的人员进行手动操作,所以在较小型的战机上是不可行的。波音公司的任务是开发美国空军的替代品,这导致了飞行高峰的概念,首先在1948年进行了测试。同时,FRL通过探头和冷水系统成功地实现了环形软管技术,并在一年后推出。这两个系统都能够消除以前方法所需的人工劳动,而不用在飞行时将工作转移到悬臂控制器,或者在探头和底盘系统的情况下将其运送到接收器导向装置。在20世纪50年代在苏联开发和测试的第三种方法涉及一种柔性软管,该软管从Tu-16轰炸机的翼尖释放出来,将被捕获在从接收机的端口翼落下的类似抓钩的装置中然后闯入加油港。这种翼对翼方法由于其复杂性而仅用于少数苏联战斗机和Tu-16型油轮,并在后来的飞机中用探头和冷水系统代替。
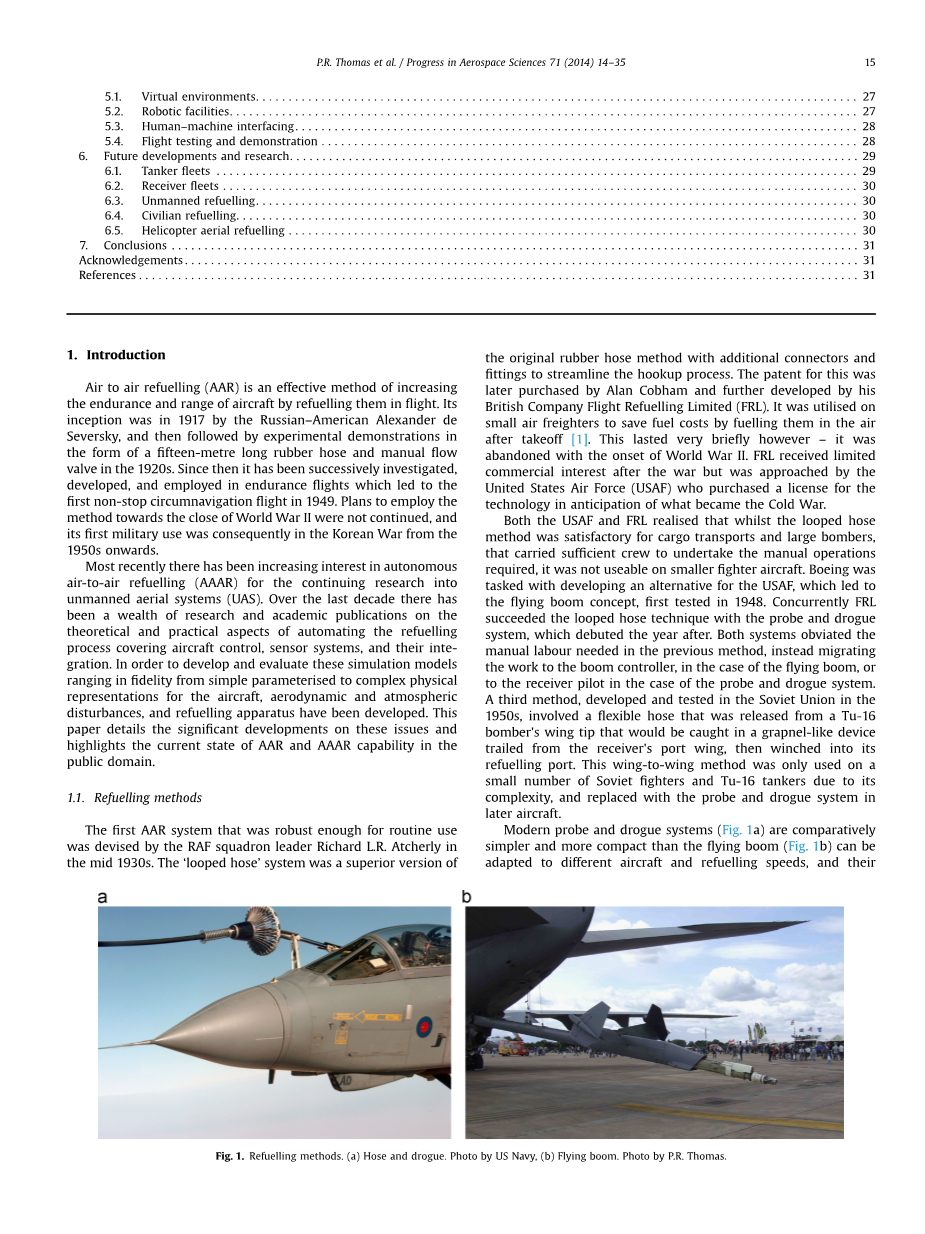
现代探头和锥套系统比飞行吊臂相对比较简单和紧凑可以适应不同的飞机和加油速度,并且它们在油罐车上的布置可以使多台飞机同时加油。显着的缺点是需要额外的和有些实质性的试验努力来以这种精度来控制接收机的速度和姿态以便与冷冻连接。水龙头是完全被动的,受油轮和接收器的空气动力学影响,这可以使其在湍流和夜间条件下成为一项艰巨的任务。相比之下,飞行吊臂可通过致动翼片进行控制,动臂控制器用于将吊杆引导到接收器的容器中,而飞行员在油罐后面的正确位置形成。虽然通过吊臂方式的加油速率可以高得多,但是吊臂的尺寸,重量和复杂性意味着在任何时候只能为一架飞机提供维修服务。
1.2。 自主空中加油
对长寿命无人驾驶空中系统(UAS)的渴望正在引起对自动加油系统或自主空对空加油(AAAR)的需求。 Nalepka和Hinchman [3]概述了与AAAR相关的驱动因素和挑战,主要障碍是:
“靠近”的能力,以便在靠近的地方操作。
碰撞避免。
指挥和控制系统必须响应人机操作员的命令。
飞机整合。
管理现实世界的约束,包括天气,昼夜条件和沟通限制。
对于现有的飞机系统和机身而言,AAAR系统所需的关键是零或最小的修改要求,以便降低成本并延长传统系统的使用寿命。 同样,应保留现行的运行程序,以满足适航认证的等效要求。 对长寿命监控和通信无人机平台的商业解决方案的兴趣可能是民用市场上AAAR能力的主要驱动力; 目前在许多国家正在探索市场
1.3 操作概述
接收机在AAR操作中所需的主要任务是相对位置控制。 接收机首次与油轮会合后,需要在其周围进行形成和操纵。 虽然演习的确切性质可能因飞机的类型和状态以及其他外部条件而异,但北约要求采用一种标准作战方法[4]。 固定翼飞机的方法如图1所示。2。
起始会合位置是接收器进入交错队列的观察位置。在油轮授予的许可之后,接收机绕着油轮的船尾行驶到指定的加油站。对于探头和锥套系统,这可能是中心线或从机翼安装的吊舱。接收器必须以稳定的方式接近锥套,并试图用探针尖端截取它。捕获速度通常必须在3-5英尺/秒(约1-1.5米/秒)内;联轴器将无法锁定在最小速度以下,而通过软管(软管鞭)的剧烈混响可能导致设备在较高的关闭速度下受到损坏。在成功捕获之后,飞行员必须将耦合的探头组件向前推向油罐以打开流量阀,然后在加油过程中将接收器保持在油罐后面的指定位置。该指定位置由飞行员通过软管上的彩色标记带识别,在加油舱后面留下40至70英尺(12-20米)的后退软管。一旦加油和清除,接收器在清除离开之前脱离,回退并操纵右舷到改革位置。使用飞行悬臂组件,接收器必须稳定在后方的位置,并且在液压缸下方的位置处,可以通过悬臂控制器被引导到接收器的加油容器中。接收器必须保持其相对位置,直到吊杆断开,然后可以操纵到端子形成位置。 为了便于适航认证,这些程序很可能会在无人系统中复制。 事实上,这种系统的要求是能够忠实地复制人类运营商的现有能力,并且可以与现有程序相互操作。
2.建模
2.1。 飞机型号
长距离无人驾驶飞行器(UCAV)可能是AAAR系统的首选受益者。创新的控制效应器(ICE)是未来UCAV设计的无尾三角翼配置,已被设计并随后公开发布,用于AAAR研究目的[5]。 [6] [7]。低调,全翼,高度扫掠的配置提供隐身,低翼载荷和增加空气动力学效率的好处。然而,由于没有垂直尾翼,减少了偏航权限的形式引入了控制挑战,并且降低了受到来自部署的上游襟翼和扰流板的下流的下游效应器的控制能力。 Barron Associates [8]中提出的非线性无尾飞机模型(BANTAM)是基于来自[9]风洞试验的数据,来自DATCOM和NASA的平面涡旋格码HASC95的估计,以及扰流板效应的数据从ICE模型[6]。它具有50°的前缘扫描,并且在低攻角时静止不稳定。现有的第三代和第四代载人飞机,如AV-8B猎兔犬(UCAV6),F-16和F / A-18的改装车型都产生了其他无人机。
这些飞机模型采用六自由度的形式,刚体动力学通常足以解决整个加油系统中飞机的力和力矩方程。气动弹性影响增加了任何模型的复杂性,但是对于特别灵活的结构(如高纵横比翼)的存在,或者详细考虑尾流湍流对外部燃料或武器商店的影响将是令人感兴趣的。这些飞机模型的空气动力学数据通常存储在查找表中,在大多数现有模型中包含足够的中等攻角和侧滑的表示。在加油的情况下,很少需要广泛的数据集,因为通过吊杆或冷冻系统的常规加油将以相对良好的态度和空气动力学角度发生。在可能的情况下减少数据集大小可以提高模拟运行时间。然而,与任何模拟练习一样,数据范围应适合研究范围。例如,需要较大的数据集来模拟中等和严重的湍流,其中局部风的方向以及油罐下水可产生特别高的迎角。
在加油操作期间,随着燃料的吸收,接收机的动力学发生了显着的影响:接收机的质量,惯性和质心(CM)有相应的变化。虽然从燃料燃烧中减少质量引起相同的效果,但是发生这种情况的时间段显着地长于燃料摄入期间。在[10]和[11]中; [12]各作者为接收机相对于油轮的位置和姿态的相对位置导出了运动的可变质量方程。前一项工作在其方程式中包括大气和尾流效应,而后者则对燃料进入位置和速度进行了更详细的分析。显而易见的是,随着燃油量的变化,飞机上的分布式燃油系统会导致CM的变化。静态边缘的相应变化会改变飞行的修剪条件,并且在加油接合中,要求接收器保持相对位置,需要对控制面进行适当的调整并进行调节。燃料在接收机中的不对称分布对于滚动控制具有影响,并且可能导致飞机对称性和惯性产物可忽略不计的频繁建模假设无效。
2.2。 唤醒湍流建模
从油轮提升表面走过的涡流对于试图稳定在后面的接收器产生相当大的湍流(图3)。 接收器也可能必须与发动机喷射冲洗相抗衡,尽管这种效果相当短暂。 对通过尾迹行驶的飞机的影响类似于风中的标准湍流,但具有一个明显不同的特性。 来自风的空气湍流是具有零平均值的固定随机过程,而尾流中的给定位置和源飞机的给定飞行条件的尾流扰动是不均匀的和时间上不变的。 Jewell和Stapleford [13]和Rossow等人进行了一些生产尾流数学模型的工作。 [14] 1975年,利用带状理论近似湍流效应。 后来的Kurylowich [15]使用了一对旋转旋涡,每个旋转涡流都具有粘稠的核心和代表性的时间衰减效应。
油罐车尾部对接收机飞机的影响的建模与分析,可以说是在一九八六年至二零零二年期间,由Bloy及其同事在曼彻斯特大学的几项作品中率先推出的。他们首先利用简单的马蹄涡模型来检验对接收器的横向[16],纵向稳定性的影响,报告了堤岸和侧滑中的发散振荡,并且从尾流的影响导致纵向稳定性下降。这种退化主要取决于油罐和油罐之间的垂直分离[18]。从1989年起,他们采用涡流格子法(VLM)来计算接收机翼上产生的力和力矩。这提供了与风洞测量相当好的一致性的结果,但是经常具有差异,由简单的马蹄涡模型[19]来解释。 [20]。之后,他们使用更逼真的平面涡流片[21]和卷起涡流模型[22],以更好地代表接收机翼的下流分布,并捕获更精确的诱导滚动力矩行为。 Bloy等的研究和发现的更详细的回顾。可以在[11]中阅读; [23]。
Rossow等人在NASA Ames研究中心进行了一项更具实验性的进一步研究[24]。[25]; [26] [27],主要关注处理运输飞机的醒来危害。 在[28] Rossow调查了空气动力学负载后面的几个后翼大小后代表亚音速运输配置着陆。 值得注意的是,他指出,由于VLM的假设,涡旋流丝不受拖尾平面图的影响,所以如果后翼不会显着扭曲流体,则该方法可以产生可靠的结果。 这被认为是这样的情况,前提是前导平面图的比例小于0.2。 越来越多地超过这个限制,他指出,预测中的趋势仍然很好,但空气动力学负荷的大小越来越多。 这一点的研究在[29]中有全面的记载。
Blake等也进行了一系列研究。 [30] [31]对较小型战斗机的形成飞行造成尾流涡流影响。除了调查对驻车任务的影响外,他们还研究了引导飞机引起的俯仰效应。他们工作的一个有目的的目标是通过组合使用VLM(具体来说是HASC95 [32]的修改版本)和风洞数据集,以达到充分的理解,以减少数学模型的大小,而不会严重损害其准确性[33]。在[34] [35]使用HASC95,然后与飞行试验结果进行比较,以验证减阻估计。 Svoboda和Ryan [36]也研究了飞行测试的实验测量,他们通过比较隔离和加油场景之间的模拟和飞行测试数据,为尾气效应得出模型。最近Dogan等人[37]报道了类似的飞行试验活动,其中接收器和油罐的风数据被记录为隔离和近距离情况。通过检查数据,他们成功地分离了由于风,空气和尾流引起的湍流引起的风力影响。
对无人机和自主空中加油的情况进行了最近的调查。布莱克,迪克斯和格林加斯[38]; [39]提出了一个30times;60 ft2风洞的空气动力学测试结果,其中有1/13型号的波音KC-135R油罐车和ICE飞机模型。油轮型号安装在靠近风洞顶部的地方,以尽量减少接收机上安装钻机的流量干扰。油轮模型包括发动机舱,加油臂和全移动水平尾巴。发动机机舱中安装有四个电风扇,并运行以模拟喷射清洗。他们的结果表明,接收器的相对横向和垂直位置引起与尾部效应的显着变化,而效应随着相对纵向位置的变化较弱[38]。使用修改后的HASC95码[32]对尾迹进行预测,并与风洞数据进行比较。力和力矩的动力学预测相当好(约25%的峰值误差),除了阻力,最有可能是由于在VLM代码中没有粘度的影响。他们还假设忽视了VLM模型中的加油繁荣,使加油位置上的预期升力达到了两倍的显着差距。在[40]中,通过比较近距离流中的俯仰和迎角,从美国空军代号Learjet的KC-135R中收集实验飞行测试数据。然后将其与旋转晶格结果进行比较,发现误差高达50%。与CFD解决方案的比较与飞行数据(约10%)更好地匹配,有趣的是,飞行繁荣是降水效应的重要来源。
不管用于建模尾流湍流及其效
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[139710],资料为PDF文档或Word文档,PDF文档可免费转换为Word
您可能感兴趣的文章
- 饮用水微生物群:一个全面的时空研究,以监测巴黎供水系统的水质外文翻译资料
- 步进电机控制和摩擦模型对复杂机械系统精确定位的影响外文翻译资料
- 具有温湿度控制的开式阴极PEM燃料电池性能的提升外文翻译资料
- 警报定时系统对驾驶员行为的影响:调查驾驶员信任的差异以及根据警报定时对警报的响应外文翻译资料
- 门禁系统的零知识认证解决方案外文翻译资料
- 车辆废气及室外环境中悬浮微粒中有机磷的含量—-个案研究外文翻译资料
- ZigBee协议对城市风力涡轮机的无线监控: 支持应用软件和传感器模块外文翻译资料
- ZigBee系统在医疗保健中提供位置信息和传感器数据传输的方案外文翻译资料
- 基于PLC的模糊控制器在污水处理系统中的应用外文翻译资料
- 光伏并联最大功率点跟踪系统独立应用程序外文翻译资料


