英语原文共 22 页,剩余内容已隐藏,支付完成后下载完整资料
第十章 便携式步行式防滑测试仪中的惯性,停留时间,粘附过渡和接触时间偏差
10.1介绍
本章涉及便携式测试仪在运行过程中产生偏差的滑动阻力测量的科学有效性。期望便携式防滑测试仪经历基于科学的偏差测试,使得在使用期间如果需要的话可以进行偏置的校准调整。
本章重点介绍了使用便携式防滑测试仪评估由鞋类 - 行走表面配对提供的牵引力的四种偏置产生机制:(1)惯性偏差或不计数 - 测试仪的运动阻力或其机械部件;(2)停留时间偏差,测试仪在其配对表面放置与测试运行开始之间的时间段内发生的摩擦增加;(3)与粘附转变机制发展相关的偏差;和(4)摩擦计可比性的接触时间偏差。
第9章分析了Powers等进行的偏差测试。[1]使用两种便携式专利防滑测试仪:(1)PIAST,以前在ASTM F 1677中描述,使用便携式可倾斜铰接式测试仪(PIAST)的标准测试方法;和(2)以前在ASTM F 1679“使用可变发病部位(VIT)的标准测试方法”中描述的VIT。这些操作标准最近已被撤回,部分原因是ASTM不希望将标准授予专有设备;这些操作标准最近已被撤回,部分原因是ASTM不希望将标准授予专有设备;因此,他们的业务偏见来源于兴趣。
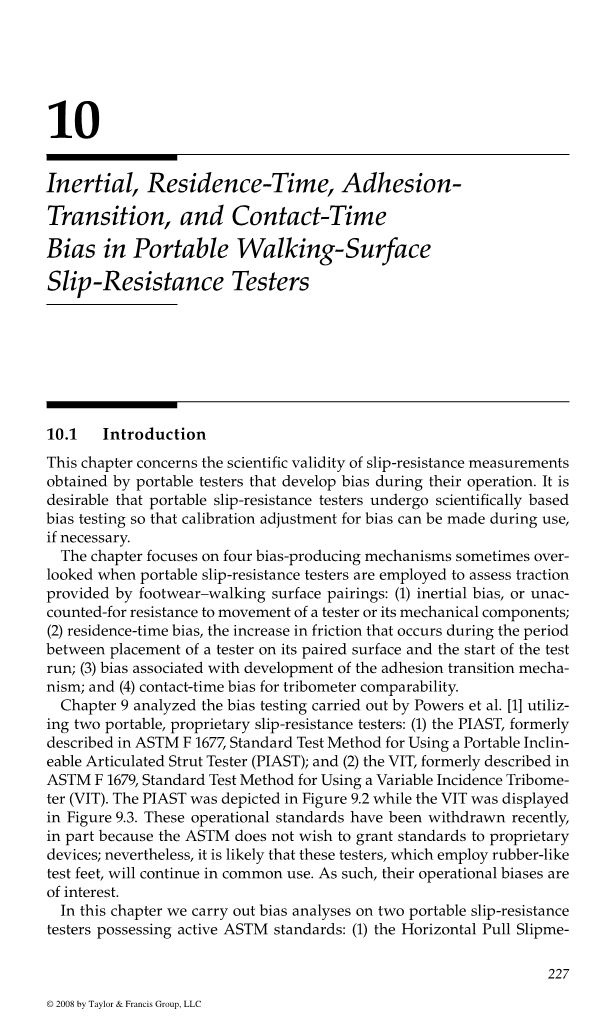
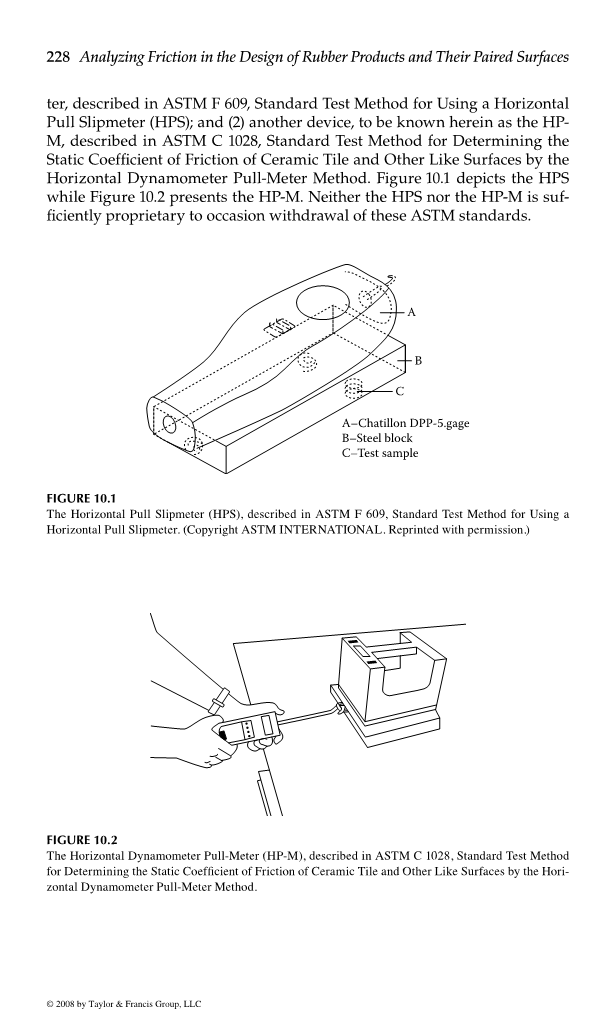
在本章中,我们对具有活跃的ASTM标准的两种便携式防滑测试仪进行偏差分析:(1)ASTM F 609“使用水平拉式滑移机(HPS)的标准测试方法”中描述的水平拉脱流量计;和(2)在ASTM C 1028“通过水平测力计拉力计法测定瓷砖和其它类似表面的静摩擦系数的标准测试方法”中描述的另一种装置,在此称为HP-M。图10.1描述了HPS,而图10.2显示了HP-M。HPS和HP-M均无法有效地撤销这些ASTM标准。
左图水平拉式滑移机(HPS),描述于ASTM F 609“使用水平拉脱水机的标准测试方法”。
左图在ASTM C 1028中描述的水平测力计拉力计(HP-M),通过水平测力计拉力计法测定瓷砖和其他类似表面的静摩擦系数的标准测试方法。
10.2便携式行走表面防滑测试仪中的可恢复惯性偏差
在便携式行走表面滑动阻力测试仪中的惯性偏差可以正确解决之前,对科学地解释此问题的摩擦测试的介绍是适当的。使用Hoechst设备已经完成了这种测试。
10.2.1使用Hoechst设备定量静摩擦测试中的惯性力
1974年,Braun和Roemer介绍了使用装有加速度计的Hoechst牵引滑雪板结合一个复杂的实验室设置进行的确定的摩擦研究,能够量测滑板在测试表面上首次滑动时的惯性运动阻力。圆形滑板(或有时称为传感器鞋)采用三个等间隔的机械研磨的铬测试脚,用于在应用于传统地砖的各种地板处理材料(如蜡和抛光)上滑动。Hoechst装置由附接到具有大直径驱动轮的变速电动机的轴向刚性但柔性带拉动。
研究人员的目的是量化这些处理材料对抗滑移性的影响。已经表明,通过适当的配方,蜡和抛光剂改善了地板在干燥条件下滑动的摩擦阻力。通过比较静态摩擦试验测量结果得出了Braun和Roemer的结论,从而适当地排除了测试鞋的惯性阻力与运动的正确关系。
Braun和Brungraber 随后介绍了Hoechst器件在静摩擦测试中的应用,并提出了其典型结果的理想化描述,如图10.3所示。Braun和Brungraber [3]随后评论了Hoechst器件在静摩擦测试中的应用,并提出了其典型结果的理想化描述,如图10.3所示。
图10.3清楚地示出了Hoechst装置的测试靴与其成对表面之间的静摩擦力Fs首先被克服,此时测试仪的运动和加速开始。最终达到最大力Fmax,之后,发生F和a中的振幅振荡减小,直到发生这些变化的完全阻尼。此时,消除了加速度,在恒定的动摩擦力Fd的作用下发生恒速滑动。应该注意的是,Fd仅略低于Fs。Braun和Brungraber [3]将拉力F的振荡表示为粘滑现象。
值得重申的是,Braun和Brungraber强调静电测试中加速度和惯性阻力的计算。
图10.3使用Hoechst拉力计装置对静摩擦试验结果进行了描述,说明了当Fmax不正确地用作静摩擦力时,在这种试验中惯性偏差的可能性。
加速度表示运动的开始,这样可以确定静摩擦力。但是,必须指出的是,不像其他设备那样使用最大的力。最大力仅在运动已经开始后才发生,并且由动态摩擦力和质量力(传感器鞋加速时)组成。它可以是实际静摩擦的三到四倍,并导致人为高的值。
10.2.2 VIT测试中的惯性偏差
10.2.2.1使用VIT设备进行静摩擦测试
如图所示,VIT装置由压缩的CO 2气体驱动,释放时,将一个选定的恒定力施加到活塞杆上,直径为3.2厘米(1.25英寸)的测试脚安装在底端。在Powers等人测试,VIT的测试脚被Neolite覆盖,一种类似摩擦材料。该设计包括压力调节器,通常由操作员设定为172 kPa(25 psi)。VIT的设定比例特写如图9.4所示。
史密斯对Powers等VIT测试结果的分析集中在VIT的测量切向力FT中的偏差。Powers等人已经确定了所测量的力板比率和VIT的比率设置之间的一致性的ICC值为0.89。因为VIT的活塞和测试脚组件在施加气体压力之前最初处于静止状态,所以它们然后被该压力加速,Smith 得出结论,这些机械部件的惯性阻力是至少一个来源由ICC值指示的偏差小于1.0。
图10.4显示了来自Powers等人的测量的FT值与VIT的比率设置的曲线图。在干燥条件下进行测试。FT值描述了最大摩擦仪设置为0.7的温和抛物线曲线。
当将0.1和0.2比率设置的绘制的FT点之间的直线外推到y轴时,指示约0.5 N(0.10磅)的截距值。如第9章所述,VIT在其测试结果中证明了橡胶微滞后。指示的FHs值约为0.5N(0.10磅),是VIT测量中未计数的偏差。第11章更充分地解决了这个偏差。
从FT测量中减去0.5 N(0.10 lb)产生代表粘附力(FA)的线。当外推时,测量粘附图通过原点。如图9.7所示。
因为VIT的设计假设当在宏观光滑的表面上使用该装置时,只有一个摩擦力生产机构发展,当摩擦力的测试脚垂直于力板时该摩擦力的大小将为零,预期的粘附力(FAE)曲线表示预期的摩擦力线。通过以图10.4所示的比率设置计算预期的摩擦力来确定该线上的点的值。在任何比例设置下的预期粘附力是获得由VIT操作员设置的FAE / FN比所需的粘附力。
图10-10 VIT测试中产生的力与设备的设定比例。
虽然Powers等人的测试中没有预料到产生橡胶微滞后力,但如果已经预见到可以在科学的基础上正确计算出来,其值可能约为0.5 N(0.10 lb)。这是因为在静摩擦测试中,FHs与FT和FN无关。Powers等人是否实际测量了FT和FN力量研究与其预期值相等,所测量的FHs力将与其预期的幅度相等。
为了参考图10.4中的常数FHs力,包括该力的曲线如图所示。通过在预期的粘合摩擦力FAE中加入0.5N(0.10lb)来计算表示各种设定比例下的FHs的值。图中也显示了由力板测量的FT力的平铺图。这些点在所使用的比率设置下构成FH和FA值之和。图10.4中给出的各种图相应标注。
测量的FT值开始在0.2和0.3比率设置之间的趋势,使其低于预期的FAE线。测量的FT力与预期的FAE值之间的差异随着设定比率的增加而增加。史密斯[4]得出结论,这些差异可能表现出一个系统的静摩擦测试偏差,这是由上述加速VIT组件的惯性惯性阻力来解释的。
由于这表明惯性静摩擦测试偏差是系统的,可以使用常规工程校准来消除其在现场干燥步行表面的VIT静摩擦测试中的意义。这种校准的数值可以在Powers等人和史密斯的文章。下面给出了一个例子。
10.2.2.2在干VIT静摩擦测试中纠正惯性偏差
由于Powers等人的静摩擦测试涉及VIT在力板上的操作,因此可以通过应用上述发现来校正报告的惯性偏差读数。图10.4说明,由于存在偏倚的原因,VIT在图中所示的整个范围内的比率设置比例“读高”。根据选择的比例,通过压缩的CO 2气体施加到VIT的活塞杆的力的可变部分被利用以克服惯性,因此不被施加到被测试的表面。我们必须从力板测量的比值中减去适当的校正因子,以通过校准来解释该惯性效应。
当VIT的激活按钮被按下时,释放的二氧化碳气体开始加速静止时的可移动部件,与测试脚的力施加到测试的行走表面相关联。惯性阻力FI开始发展。当然,这种阻力出现在操作者选择的任何设定角度。如果测试脚精确地垂直于行走表面定向,则惯性阻力将完全在该法线方向。如图9.4所示,当设定角度从0°开始向45°增加时,出现与试验表面相切的惯性力分量。
惯性力分量(FIT)由图10.4中的阴影表示。如图中的阴影区域所示,随着设定比例的增加,VIT的活塞杆的方向从垂直方向向水平方向旋转时,FIT增加。图10.4中的虚线用于帮助区分切向惯性阻力的显着增长与VIT设置增加时在较低比率范围内产生的摩擦力。
值得注意的是,测量的切线力FT可以由表达式表示
因此,当可变切向惯性力分量等于恒定微滞后力时,公认的测量切向力等于FAE。这一点如图10.4所示。
利用0.5比例设置作为惯性偏置校正的一个例子,力板测量相应的比例为0.48;因此,相当于0.02的比例被“利用”来克服切向惯性。因此,相当于0.02的比例被“利用”来克服切向惯性。该校准的FT值具有两个部件:(1)约0.5N(0.10lb)的FHs力和(2)FA值为16.5N(3.6lb)的FHs力。校准后的FT值可以在校正过程中用于正常的惯性偏差。
图10.5给出了通过力板测量的VIT施加的法向力与Powers等静摩擦试验中使用的固定比的曲线图。还描绘了计算的预期FN值。虽然施加的法向力无疑由正常的惯性阻力分量减小,但垂直角度的余弦在所涉及的设定角度上并没有大的变化,没有明显的法向惯性偏差模式;相反,无法控制的随机错误似乎占主导地位。因此,图10.5所示的计算的预期FN值可用于校准。
再次使用0.5比率设置作为示例,图10.5中所示的计算的校正法向力为约33.2N(7.3lb)。包括FHs力在内的17.0 N(3.6 lb)的校准FT值除以33.2N(7.3 lb),得到校准后的VIT读数为0.51。当然,随着设定比例的增加,校准校正会有更大的影响。在这方面,应该注意的是,在实践中,使用VIT的设定比例为0.8和0.9并不罕见。应该进一步注意,为了全面科学评估VIT的惯性偏差,应进行加速度计测试。然而,似乎毫无疑问,惯性抵抗是一个罪魁祸首。
当在宏观光滑的表面上使用VIT时,通常使用VIT时,如上所述的补救静摩擦偏差校正可以用于校准目的。VIT的惯性力量,通过Powers等人的分析量化。测试应始终发展到相同的程度,当设备保持正确的修理和用于静摩擦测试以上述方式。
不使用这种惯性校准的VIT的使用构成了设备的操作,而没有量化响应于设定比率变化而变化的因变量(FIT)。如果在静摩擦测试中没有考虑到这种惯性偏差,则VIT以不完全科学的方式运行。、
10.2.2.3当用作动态摩擦测试仪时,VIT中的惯性偏差
作为便携式行走表面防滑测试仪的偏置校准的另一个例子,我们现在讨论VIT的动态使用。VIT用作动摩擦测试仪,当通过向上旋转并且“摆出”后,其铰链测试脚滑动后,设置比率读数被采用。图10.6描绘了VIT的摆动机构。还显示了设定比例刻度的四分之一圆形轮廓在特定比例设置下的动态测量通过应用所假定的常数摩擦系数来量化
图10.6 VIT摆动机制的描述。(来自美国专利5,259,236; 1993)
在Powers等VIT测试中使用的最大设定比例为0.8。由于测试脚滑移发生在该比例下,相应的FT测量未在第9章讨论的ICC计算中报告或使用。测试脚的滑动对力板的应用显然发生得如此之快,无法获得有意义的力板读数。
在VIT的测试脚与力板在0.8设置下接触之前,如上所述,VIT活塞测试脚组件的线性加速度被称为FIT惯性偏置。除了这种偏差之外,还出现了在滑动点的0.8比测量中的惯性偏差的另外两个贡献:(1)各种VIT部件的抗旋转加速度和(2)在旋转期间的抗弯曲变形在活塞式加压系统中使用的塑料二氧化碳供料和软管。这些软管的部分如图9.3所示。
VIT的活塞杆组件部分封闭在金属气缸中,该气缸在活塞上端的安装支架上向上旋转。VIT的活塞杆组件部分封闭在金属气缸中,该气缸在活塞上端的安装支架上向上旋转。
必须在出现测试脚出现之前出现对所涉及的VIT部件的转动加速度的惯性阻力。所涉及的部件是活塞测试脚组件,具有内容物的圆柱形壳体,以及CO 2进料和排气软管。这些旋转部件的总重量约为0.7N(0.15lb)。以0.7比率施加到力板的平均FT力为19.9N(4.4lb)。
图10.7 VIT圆柱形外壳的描述,显示活塞杆和复位弹簧。(来自美国专利5,259,236;1993年)
在现场使用VIT来评估走路表面的动态防滑性能并不罕见,操作者可以看到设备测试脚经历的粘滑事件。随着测试脚的摆动点接近,测试脚有时会在行走表面上向前滑动一点,然后停止。增加设定比例增加一般会导致传统的测试脚滑动。
这种粘滑事故有可能与所涉及的VIT部件的旋转加速度的阻力有关。VIT操作的视觉观察当然不能通过所施加的切线力超过行走表面的摩擦阻力来告诉操作者,并且需要进一步增加设
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[139725],资料为PDF文档或Word文档,PDF文档可免费转换为Word
您可能感兴趣的文章
- 饮用水微生物群:一个全面的时空研究,以监测巴黎供水系统的水质外文翻译资料
- 步进电机控制和摩擦模型对复杂机械系统精确定位的影响外文翻译资料
- 具有温湿度控制的开式阴极PEM燃料电池性能的提升外文翻译资料
- 警报定时系统对驾驶员行为的影响:调查驾驶员信任的差异以及根据警报定时对警报的响应外文翻译资料
- 门禁系统的零知识认证解决方案外文翻译资料
- 车辆废气及室外环境中悬浮微粒中有机磷的含量—-个案研究外文翻译资料
- ZigBee协议对城市风力涡轮机的无线监控: 支持应用软件和传感器模块外文翻译资料
- ZigBee系统在医疗保健中提供位置信息和传感器数据传输的方案外文翻译资料
- 基于PLC的模糊控制器在污水处理系统中的应用外文翻译资料
- 光伏并联最大功率点跟踪系统独立应用程序外文翻译资料


